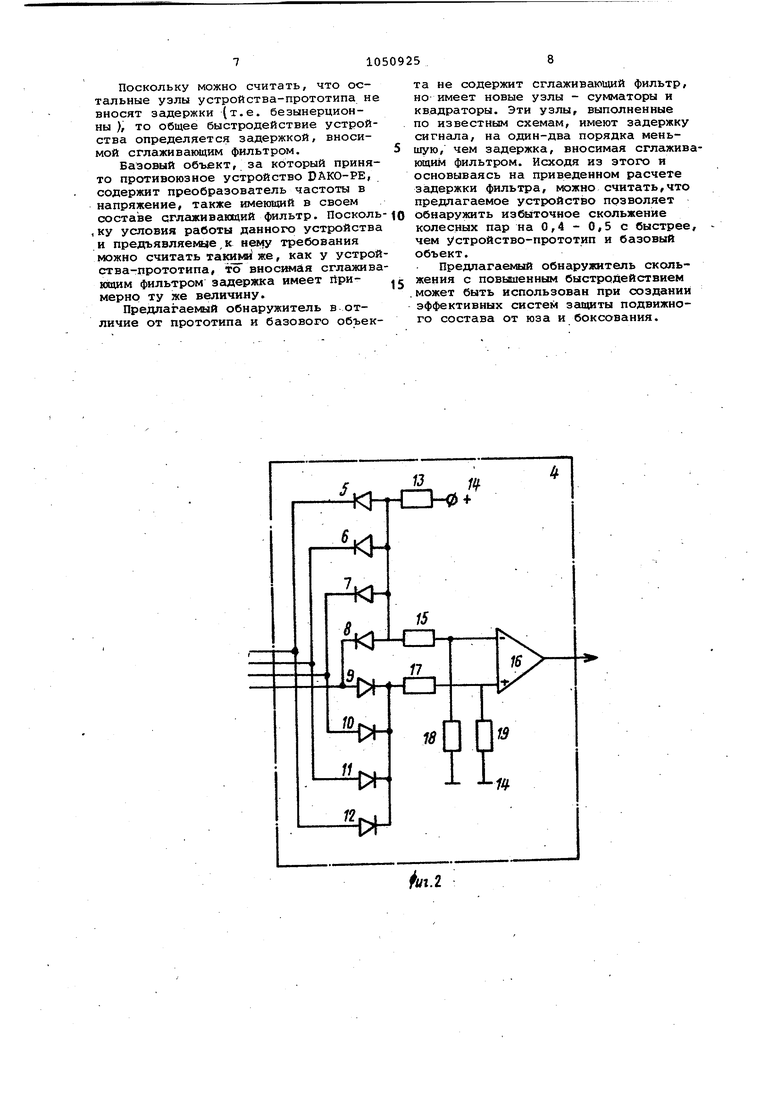
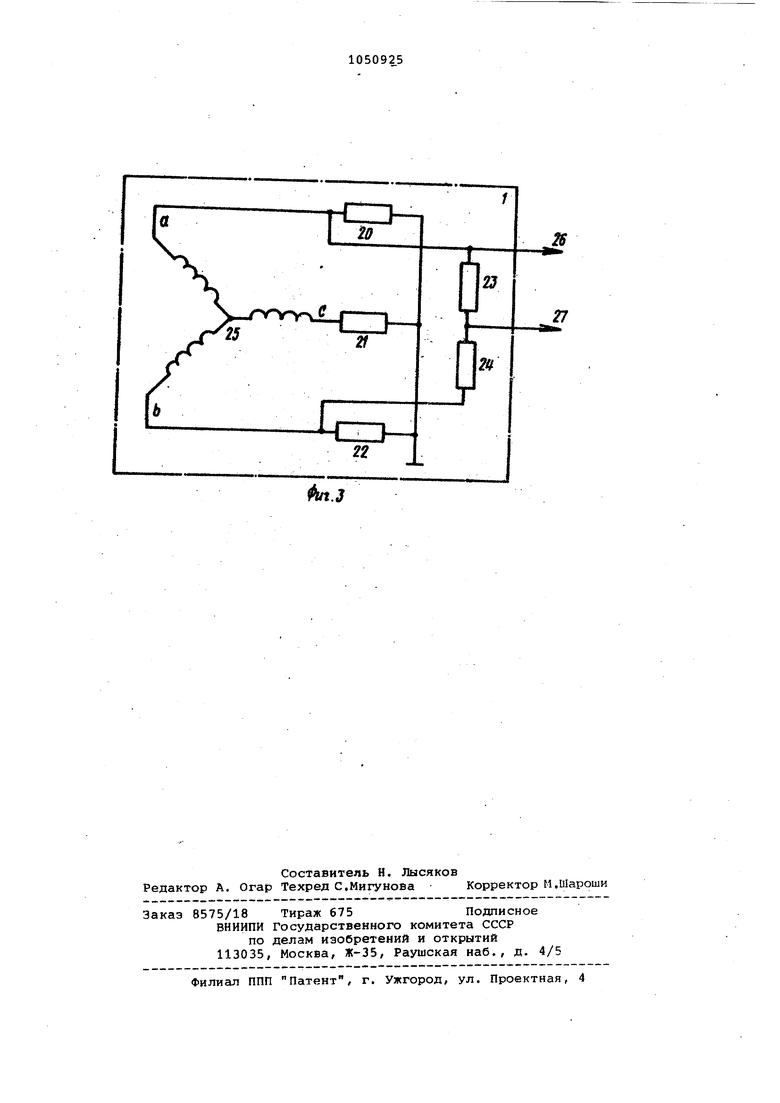
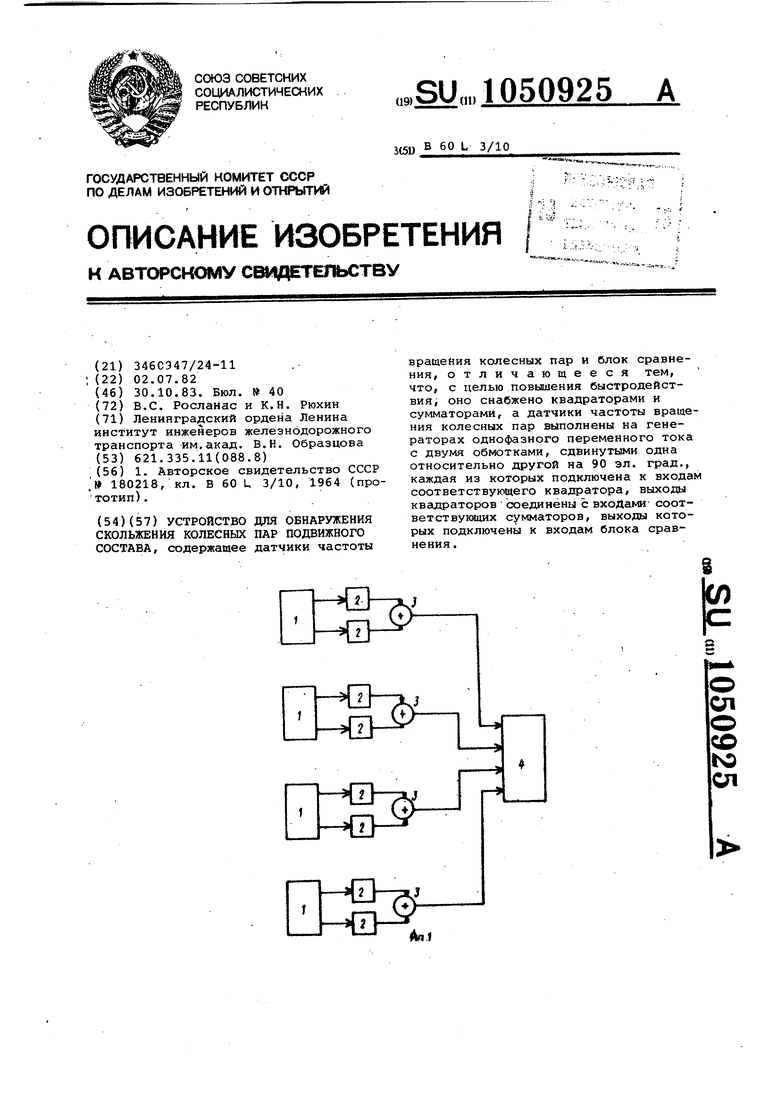
Изобретение относится к транспорту, в частности к устройствам для обнаружения скольжения колесных пар подвижного состава. Известно устройство для обнаружения скольжения колесных пар подвижного состава, содержащее датчики час тоты вращения колесных пар и блок сравнения Однако известное устройство харак теризуется недостаточным быстродейст вием. вследствие наличия С1 лаживающих фильтров на выходах датчиков частоты вращения колесных пар, представляющих собой генераторы переменного тока. Генератор вырабатывает синусоидальный сигнал амплитудное значение которого прямо пропорционально мгновенной скорости вращения соответ ствующей колесной пары U Ku., где U-.-. - амплитуда напряжения тахогенератора}К - коэффициент пропорциональности (крутизна характерис тики тахогенератора ); Uf - угловая скорость колесной Если осевой тахогенератор выполнен многофазным то мгновенное напря жение (Jff- п-й, фазы определяется выражением (2J7ft + (2Kt4if);(2 где f - частота фазного напряжения} t - текущее значение времени; f - угол сдвига между напряжениями п-й фазы и фазы, принятой за начальную. Чем выше требования в качеству фильтрации, тем больше постоянная времени фильтра, а следовательно, больше вносимая им задержка. В ряде случаев такая задержка может превысить допустимое значение и привести к возникновению разносного боксовани или к заклиниванию колесной пары при торможении. Цель изобретения - повышение быст родействия устройства для обнаружени скольжения колесных пар подвижного состава. Поставленная цель достигается тем что устройство для обнаружения сколь жения колесных пар ПОДВИЖНОБО состава, содержащее датчики частоты враще ния колесных пар и блок сравнения, снабжено квадраторами и сумматорами, а датчики частоты вращения колесных пар выполнены на генераторах однофаз ного переменного тока с двумя обмотками, сдвинутыми одна относительно дру1Ч)й на 90 эл. град., каждая из которых подключена к входам соответствующего квадратора, выходы квадраторов соединены с входами соответствующих сумматоров, выходы которых подключены к входам блока сравнения. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2принципиальная электрическая схема блока сравнения, вариант истголнения} на фиг. 3 - принципиальная схема датчика частоты вращения с использованием многофазного i генератора переменного тока, вариант исполнения. Устройство (фиг. 1 ) содержит датчики 1 частоты вращения колесных пар, выходы каждого из которых подключены к входам соответствующих квадраторов 2. Выходы квадраторов подключены к входам соответствующих сумматоров 3, выходы которых подключены к входам блока 4 сравнения. Блок 4 сравнения (фиг. 2) содержит диоды 5 - 12, соединенные попарно анодами и катодами, при этом указанные очки соединения являются входами блока 4. Аноды диодов5-8 объединены и через резистор 13 подключены к положительной клемме 14 источника смещения, а через резистор 15 - к одйому из Входов операционного усилителя 16. Катоды диодов 9-12 объединены и подключены через резистор 17 к другому входу операционного усилителя 16. Входы операционного усилителя 16 соединены также с отрицэ,тельной клеммой 14 источника смещения через резисторы 18 и 19. Диоды 5 - 8 с резистором 13 образуют узел выбора минимального напряжения, а диоды9 12 - узел -выбора максимального напряжения. Резисторы 13,15,17 - 19 с источником смещения и операционным усилителем 16 образуют компаратор напряжений. Выход усилителя 16 является выходом блока сравнения и выходом всего устройства. Датчик 1 частоты вращения фиг. 3) Колесных пар с использованием генератора многофазного синусоидального напряжения содержит резисторы 20-24, подключенные к обмотке 25, например трехфазной со сдвигом фаз 120°. Резисторы 20 - 22, подключенные к выводам а, to, с обмотки .25 образуют трехфазную симметричную нагрузку с общей нулевой точкой. Резисторы 23 и 24 образуют суммирующую цепь. На выходе .27 фаза сигнала сдвинута на 90 относительно фазы, сигнала с выхода 26. Напряжение UQ, , LI.J, и Uj.. на выходах а, в, с, генератора сдвинута по фазе на 120, поэтому их мгновенные значения определяются выражениями U 0 9S«n2J7 ; (2T,f±-i20°)t (3) (2 -240;, где амплитуда фазового напряжения тахогенератора; - частота фазного напряжения тахогенератора; t - текущее значение времени. Напряжение и„ на выходе 26 суммирующей цепи равно гь--,, где С, и С2 - коэффициенты суммирования . Значения коэффициентов суммирования устанавливают следуютцими: 1 - „ 2 S гт 2 2С :. Поскольку суммирующая цепь, состо ящая из разисторов 23 и 24, является пассивной, то выбранные значения коэффициентов сумлвдрования обеспечиваются соотношением величин сопротив лений резисторов 23 и 24 и величиной коэффициента усиления квадратора 2, связанного с косинусоидальным выходом 26 датчика 1. С учетом выбранных значений коэффициентов С и С2напряжения на выходе 26 равно 26 УT 19 2;/ft + f| (2J t-«o)(2Jift-90l 2Jrft .(5-) Устройство работает следующим образом. Датчик 1 вырабатывает синусоидаль ный сигнал, амплитуда и напряжения которого прямо пропорциональна угло вой скорости из соответствукяяей колесной пары ,(Ы где К - коэффициент пропорционально ти (крутизна характеристики датчика скорости }. Сдвиг фаз между напряжениями на одном и другом выходах датчика 1 со ставляет . 90 j поэтому мгновенные зн чения напряжений на одном и другом выходах датчика 1 определяются в.ыра жениями и Ku)S4n2Ffi; Kw 51п(2Л -1490) Kurcos 2J7-tt,j где U;., и ( мгновенные значения на пряжений на выходах дат чика 1 , f - частота колебаний напряжения на каждом из выходов датчика 1. Квадраторы 2 выполняют квадратичнЪе преобразование сигналов датчика 1, поэтому напряжения 1/2 на выходах квадраторов 2 определяются выражениями и„. ак2 . ; и )cos 2Jft , де а - постоянный коэффициент (крутизна характеристики квадратора . Напряжение (Jj на выходе сумматора 3 J, (sin 2Jifi co5 2Jifi).к2.-2 Из формулы{9) следует, что в любой омент времени напряжение на выходе каждого сумматора 3 прямо пропорци-. нально квадрату угловой скорости соответствующей колесной пары. При этом указанное напряжение не содерит гармонических составляющих и, следовательно; не требует сглаживания с помощью фильтра. Сигналы от всех сумматоров 3 поступают в блок 4 сравнения, который определяет наличие избыточного скольжения. Последнее имеет место, если выполняется неравенство где U) и ui,-n - максимальная и минимальная угловые скорости колесных пар транспортного средства) Е - заданное пороговое значение. Неравенство (ю) может быть преобразовано к виду Д1+е) Таким образом, для выявления-избыточного скольжения необходимо осуществлять непрерывный контроль выполнения неравенства (111 Для этого блок 4 сравнения определяет максимальное входное напряжение иэ,р(х t минимальное входное напряжение и3 и осуществляет непрерывный контроль соотношенияin 7/() (3 ()- С) max m-ln Поскольку согласно формуле (9) Зп,то неравенство (13) эквивалентно неравенству (10). Если имеет место не равенство (13), то блок 4. сравнения вырабатывает сигнал скольжения. В том случае, если требуется п изводить индивидуальный контроль скольжения каждой колесной пары, условие наличия избыточного скольжения 1-й колесной пары выражается неравенством U), - UJ. где со - угловая скорость колесной пары i,- угловая скорость эталонно колесной пары. При контроле положительного изб точного скольжения, т.е. бйксовани min- При койтроле отрицатель ного избыточного скольжения, т.е. юза, W, ma.,,. Неравенство (15 может быть пре образовано к виду (.(16) Для осуществления непрерывного контроля соотношения (16 ) блок 4 сравнения определяет эталонное напряжение Uj , причем Vsa э при контроле боксования, U 03 при контроле юза, и осуществляет верку выполнения неравенства (n-g; (11) и /и, (. (18J 3, З Поскольку согласно формуле (9) и, ; V и, а К tu , э то неравенства (18) и (15) эквива лентны. Если выполняется неравенство (1 то блок 4 сравнения вырабатывает сигнал избыточного скольжения i-й колесной пары. Использование квгщраторов в пре лагаемом обнаружителе позволяет по высить его быстродействие, так как исключает необходимость использова ния сглаживанвдих фильтров, вносящих большую задержку. Так, сглаживающий LC - фильтр, применяемый в устройстве-прототипе вносит задержку, длительность которой равна Ч«А. (20) где f- постоянная времени сглажива щего фильтра. Величина t определяется емкостью С и индуктивностью L сглаживающего фильтра, которые, в свою очередь, зависят от требуемых частотных свой ств фильтра. Для фильтра нижних частот (котор является фильтр устройства-прототип указанные зависимости выражаются известными формулами frYLC ; (21; Т где ШСР - частота среза фильтра. Фильтр нижних частот пропускает частоты меньшие, чем частота среза, включая постоянный ток, и задерживает более высокие. Поскольку фильтр устройства-прототипа предназначен для сглаживания пульсаций выпрямленного напряжения тахогелератора, то исходным требованием к синтезу этого фильтра является его частота среза, т.е. минимальная частота сглаживаемых пульсаций. В идегшьном для транспортного средства случае эта часто е равна нулю, однако практически этого достигнуть невозможно, поэтому уста навливается конечное значение часто среза, соответствующее опрвделенной CKOPOCTJI V, движения транспортного средства. При скорое- тях движения меньших, чем min ° наружитель скольжения отключается, так.как его работоспособность при этом нарушена, в частности, из-за больших пульсаций выпрямленных сигналов тахогенераторов. Значение целесообразно устанавливать в пределах 5-10 км/ч. рассчитаем задержку, вносимую сглаживаюдам фильтром противобоксовочного устройства тепловоза. Минимальная скорость v движения, при которой устройство работоспособно, равна 8 км/ч, диаметр колес тепловоза равен 1 м, тахогенераторы и выпрямители выполнены по трехфазной схеме. Угловая скорость Ы вращения колеса, соответствующая линейной скорости , составляет :-р 2,32 11с. Частота ш пульсаций выпрямленного трехфаэного напряжения тахогенератора, соответствующая скорости, вращения колеса, равна «2,32 13,9. 11с. Эта частота пульсаций должна быть равна частоте среза сглаживающего фильтра .zuj 13,9 f/t . Из формулы (22 I находим постоянную времени сглаживающего фильтра ,9 0,154 с. Задержка, вносимая фильтром согласно формуле (20), составляет t-. 3 f 3-0,,462 с. эо
Поскольку можно считать, что остальные узлы устройства-прототипа не вносят задержки (т.е. безынерционны ), то общее быстродействие устройства определяется задержкой, вносимой сглаживающим фильтром.
Базовый объект, за кбторый принято противоюзное устройство DAKO-PE, содержит преобразователь частоты в напряжение, также имеющий в своем составе сглаживающий фильтр. Посколь,ку условия работы данного устройства и предъявляенеде,к нему требования можно считать таким же, как у устройства-прототипа, то вносимая сглаживаняцим фильтром згщержка имеет йримерно ту же величину.
Предлагаемый обнаружитель в отличие от прототипа и базового объекта не содержит сглаживающий фильтр, но- имеет новые узлы - сумматоры и квадраторы. Эти узлы, выполненные по известным схемам, имеют задержку сигнсша, на один-два порядка меньшую/ чем задержка, вносимая сглаживющим фильтром. Исходя из этого и основываясь на приведенном расчете задержки фильтра, можно считать,что предлагаемое устройство позволяет обнаружить избыточное скольжение колесных пар на 0,4 - 0,5 с быстрее чем устройство-прототип и базовый объект.
Предлагаемый обнаружитель скольжения с повьааевным быстродействием .может быть использован при создании эффективных систем защиты подвижного состава от юза и боксования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения юза колесных пар подвижного состава | 1984 |
|
SU1245452A1 |
| Устройство для обнаружения боксования тепловоза | 1977 |
|
SU765043A1 |
| Обнаружитель скольжения колесных пар подвижного состава | 1982 |
|
SU1050923A1 |
| Устройство контроля скольжения колесных пар транспортного средства | 1982 |
|
SU1022842A1 |
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
| Устройство для определения скорости вращения колесной пары транспортного средства | 1982 |
|
SU1084157A1 |
| Устройство обнаружения избыточного скольжения колесных пар подвижного состава | 1981 |
|
SU982939A1 |
| Устройство для защиты от избыточного скольжения колесных пар транспортного средства | 1984 |
|
SU1316860A2 |
| Устройство для измерения скорости движения поезда | 1984 |
|
SU1163269A1 |
| Устройство регулирования возбуждения тягового генератора | 1983 |
|
SU1164095A2 |
-
15
5 7
%П-с
)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР , 180218, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
