сд
о со ю
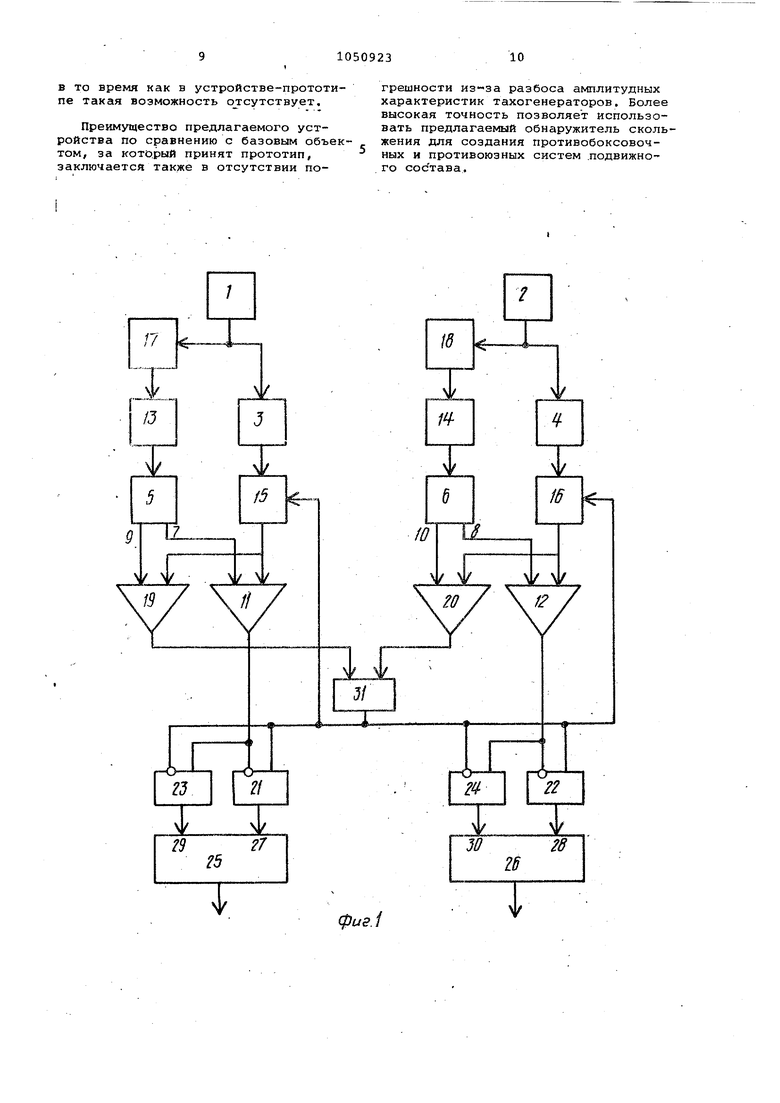
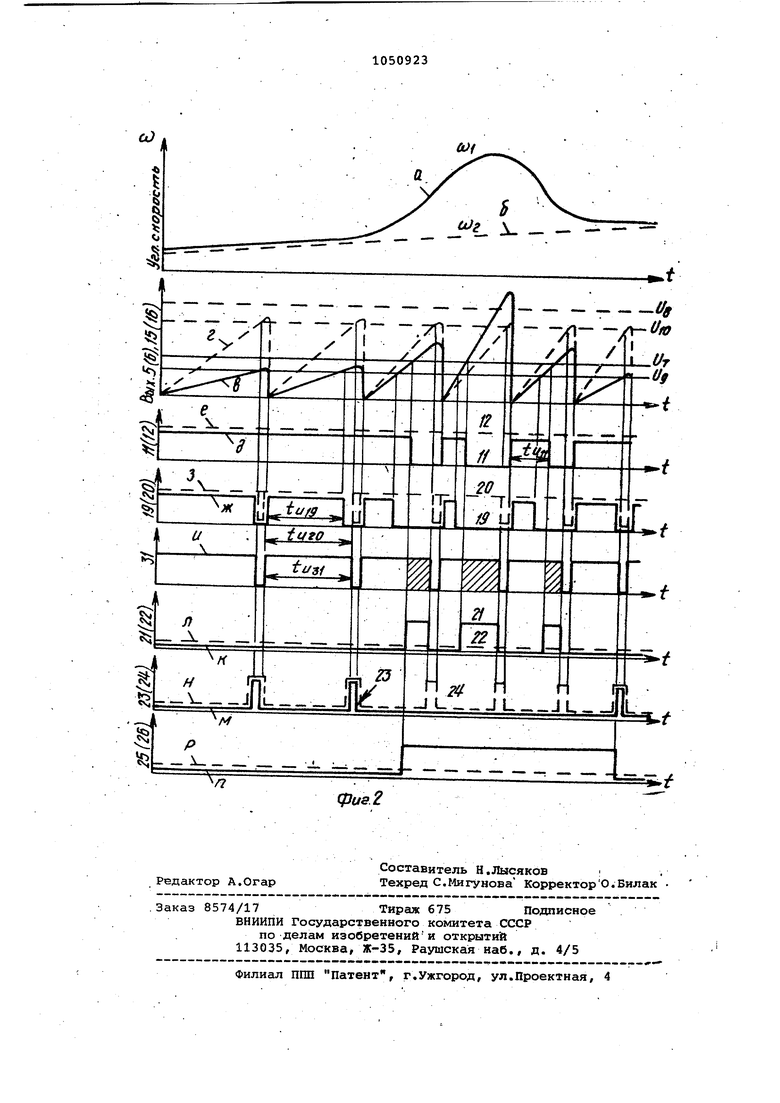
оо Изобретение относитря к транспор ту, в частности к устройствам для обнаружения скольжения колесных пар транспортных средств, и может быть применено в устройствах защиты от юза и боксования подвижного состава Известен обнаружитель скольжения колесных пар подвижного состава, содержащий на каждую контролируемую колесную пару синхронный тахогенератор с выпрямителем на выходе, сгл живающий фильтр и компаратор 1. Недостатком указанного обнаружителя является большая погрешность в определении проскальзывания. Это обусловлено тем, что осевой тахогенерагор вырабатывает синусоидальное напряжение, амплитудное значение которого прямо пропорционально скорости вращения колесной пары v,r к,ы , (1) где v амплитудное значение переменного напряжения тахогенератора,коэффициент пропорциональности - крутизна характери тики тахогенератора,UJ- угловая скорость колесной Крутизна К характеристики не является строго постоянной величино что вызывается рядом причин: старением магнитов, зависимостью свойств магнитных материалов и сопротивления обмоток от температуры, нелинейностью характеристик из-за насы.щения магнитопроводов, разбросом характеристик от. образца к образцу, и т.д. Нестабильность крутизны характеристики тахогенератора (т.е. отклонение реальной амплитудной характеристики от идеальной ) приводит к погрешности определения проскальзывания колесных пар. Цель изобретения - повышение точ ности обнаружителя скольжения путем нейтрализации погрешности, вызванной отклонениями амплитудных характеристик тахогенераторов. Поставленная цель достигается .тем, что обнаружитель скольжения колесных пар подвижного состава, со держащий на каждую контролируемую колесную пару синхронный тахогенера тор с выпрямителем на выходе, сглажи вающий фильтр и компаратор, снабжен на каждую контролируемую колесную пару дополнительными выпрямителем и компаратором, интеграторами, элементами ЗАПРЕТ и триггером и общим для всех колесных пар элементом ИЛИ, подключенным своими входами к выходам дополнительных компара торов , а выходом - к одним из входов элементов ЗАПРЕТ и к одним из входов одних из HHTerjjaTopoB, другой вход каждого из которых соединен с выходом выпрямителя, а выход - с одним из входов дополнительного и основного компараторов, выход последнего из которых соединен с другими входами элементов ЗАПРЕТ, соединенных своими выходами с входом триггера, при этом выход каждого синхронного тахогенератора подключен к входу другого интегратора, выход- которого через дополнительный выпрямитель соединен с входом сглаживающего фильтра, соединенного выходом с другими входами основного и дополнительного компараторов . На фиг. 1 представлена блок-схема предлагаемого обнаружителя; иа фиг. 2 - временные диаграммы, поясняющи-е его работу. Устройство (фиг. 1) содержит синхронные тахогенераторы 1 и 2 двух контролируемых колесных пар,.выпрямители 3 и 4, подключеннью к выходам тахогенераторов 1 и 2, сглаживающие фильтры 5 и б с выходами 7, 8 и 9, 10, отличающиеся масштабами выходных сигналов, и подключенные к выходам 7 и 8 сглаживакядих фильтров .5 и б компараторы 11 и 12. Дополнительные выпрямители 13 и 14 подключены к входам фильтров 5 и б. Интеграторы 15 и 1.6 подключены к выходам выпрямителей 3 и 4 и соединены своими выходами с другими входами основных компараторов 11 и 12. Другие интеграторы 17 и 18 подключены к тахогенераторам 1 и 2 и соединены своими выходами с входами дополнительных выпрямителей 13- и 14. Дополнительные компараторы 19 и 20 подключены к выходам 9 и 10 сглаживающих фильтров 5 и 6 и к выходам интеграторов 15 и 16. Выходы компараторов 11 и 12 подключены к входам элементов ЗАПРЕТ 21,22 и 23,24, которые подключены к триггерам 25 и 26 через их входы 27, 28 и 29, 30. Общий для всех колесных пар эле- j мент ИЛИ 31 поключен к выходам дополнительных компараторов 19 и 20 и соединен своим выходом с другими входами элементов ЗАПРЕТ 21,22 и 23, 24 и другими входами интеграторов 15 и 16. : Кривые OJ и 5 (фиг. 2) представляют собой угловые скорости. соответ-. ственно первой и второй контролируемых колесных пар транспортного средства, а кривые в,г,д,е,ж,з,и,к, л,м,н,п,р - напряжения на выходах соответственно элементов 15,16, 11, 12,19,20,31,21,22,23,24,25, 26. Обнаружитель работает следующим образом. Синхронный тахогенератор 1 вырабатывает синусоидальный сигнал, амплитуда V частота f которого пропорциональны угловой скорости w со ответствующей колесной пары и V 5in27r t), (2) где и .- текущее значение напряжения тахогенератора 1; К,т - коэффициенты пропорциональности ;t - текущее значение времени. Величина коэффициента m полностью определяется конструктивным выполнением тахогенератора (числом полюсов магнитной системы/ и для определенного типа тахогенераторов является постоянной. Велич.ина коэффициента К (крутизны характерис тики тахогенератора) может иметь различные отклонения. Сигнал с выхода тахогенератора 1 подается на выпрямитель 3, выполнен ный по двухполупериодной схеме. Нап ряжение 1/3 на выходе выпрямителя 3 равно абсолютному значению напряжения тахогенератора 1 ( . :(3) где U.J и U.Jпостоянная и переменная .составляющие выходного напряжения выпрямителя 3) коэффициент пропорциональности. Выходное напряжение выпрямителя поступает на информационный вход интегратора 15. Параметры интегратора 15 выбирают такими, что он наряду с интегрированием выполняет роль сглаживающего фильтра, подавляквдего переменную составляющую О, выходного напряжения выпрямителя 3. Поэтому напряжение на выходе пер вого интегратора 15 равно Г Vr- .dt.f-K,, , (4 1 J 15 J 1 где Т постоянная времени интегра тора 15; текущее значение времени, отсчитываемое от начала цикла интегрирования (т.е. от момента окончания сброса интегратора в ноль). Сигнал с выхода интегратора 15 поступает на один из взводов компара тора 11, на другой вход которого поступает сигнал с выхода 7 сглажив ющего фильтра 5. Компаратор 11 сраб тывает при условии iS-- 7где ti-,- напряжение на выходе 7 фильтра 5. I Сигнал тахогенератора 1 поступает на вход другого интегратора 17, выходное напряжение 0 которого равноU,:j jO;di ,,5.nmu,,a где Т - постоянная времени интегратора 17. Сигнал с выхода интегратора 17 последовательно проходит через дополнительный выпрямитель 13 и сглаживающий фильтр 5, обладаяХчКй большой постоянной времени, поэтому можно считать, что напряжение О,.на выходе 7 фильтра 5 равно амплитудному значению напряжения U.,. С учетом выводов (4) и (7) условие (5) срабатывания компаратора 11 будет иметь вид -,.-- /е; Г Под срабатыванием компаратора в данном случае понимается скачкообразное .изменение выходного напряжения компаратора с единичного уровня до нулевого или обратно, В соответствии с этим длительность t.j,выходного импульса компаратора 11 (т.е. отрезок времени между двумя последовательными срабатываниями компаратора) может быть получена из формулы (9) при условии t t (11; -ti Т m 1А)д, Из формулы (11) следует, что длительнбсть Выходного импульса первого компаратора 11 обратно пропорциональна угловой скорости первой колесной пары и не зависит от крутизны К характеристики тахогенератора 1. Аналогично длительность г выходного импульса первого компаратора 12 обратно пропорциональна угловой скорости ш второй колесной пары и не зависит от крутизны Kg характеристики тахогенератора 2. T,gmu,,fx где Т и - постоянные времени интеграторов 16 и,18, Таким образом, в канале каждой колесной пары осуществляется преобр зование угловой скорости to в обратно пропорциональную ей длительHoctb. t импульса, причем на точнос преобразования не оказывает влияние крутизна характеристики техогенератора. Обнаружение избыточного сколь жения какой-либо колесной пары производится посредством сравнения длительности импульса, сформированн го в канале данной колесной пары, с длительностью эталонного импульса соответствующей скорости эталонной (не скользящей ) колесной пары. Для формирования эталонного импульса и последующего сравнения импульсов служит схема, состоящая из дополнительных компараторов 19 и 20, эле мента ИЛИ 31,элементов ЗАПРЕТ 21-24 и триггеров 25 я 26. На один из входив компаратора 19 поступает сигнал с выхода интеграто ра 15, напряжение U которого определяется формулой (4;. На другой вход компаратора 19 поступает сигнал с выхода 9 сглаживающего фильтра 5. Напряжение Ug этого сигнала сосаавляет некоторую долю напряжения 0 на первом выходе 7 (в том случае, когда устройство является обнаружителем боксования). Ug-rU r ( где f- коэффициент пропорциональности ( 1), или, в соответствии с формулой (7), Условие срабатывания компаратоfia 19 ИЛИ, с учетом формул (4) и (14) тТГ Длительность выходного импульса компаратора 19 может быть определена из формулы (16) при условии , Сравнение формул (18) и (11 пок зывает, что выходной импульс компаратора 19 в J раз короче выходного импульса компаратора 11. Аналогично длительность выходног импульса компаратора 20 определяется формулой -г lib С помощью элемента ИЛИ 31 осуществляется логическое суммирование выходных импульсов компараторов 19 и 20. Поскольку передние фронты этих импульсов совпадают (это обеспечивается одновременной подачей сигна- лов сброса на интеграторы 15 и 16, длительность g импульса на выходе элемента ИЛИ 31 определяется формулойt,. я mo(j( (.)- 31 Импульс на выходе элемента ИЛИ 31 является эталонным: его длительность t(j обратно пропорциональна угловой йкорости наиболее медленно вращающейся- (т.е. не боксующей в данный момент) колесной пары. Задний фронт этого импульса является сигналом сброса .интеграторов 15 и 16. На элементах ЗАПРЕТ 21-24 производится сравнение длительности tfj. эталонного импульса с длительностью t (tjj) импульса контролируемой колЪсной пары. Если имеют место соотношение -t -rто появляется импульс на выходе элемента ЗАПРЕТ 23, который по нулевому входу 29 устанавливает триггер 25 в нулевое состояние, соответствующее отсутствию скольжения первой колесной пары. Если имеет место соотношение tu3, tu , (22) то появляется импульс на выходе элемента ЗАПРЕТ 21, который устанавливает триггер 25 в единичное состояние, соответствующее наличию у первой колесной пары избыточного скольжения. Аналогичньзм образом выполняется скольжение2-й колесной пары. Неравенство (22) с учетом формул (11) и (201 имеет вид () Т, тд.ш Если, например, первая колесная Пара, начала боксовать, то и/ w и в соответствии с формулами (18) и (19) Тогда неравенство (23) записывается в виде ..Il6 . IiS и Ifgrn/uw ,Mj Параметры схемы устанавливаются такими, что Т 5 Х и Т т.. Тогда неравенство (25) имеет вид
cu -w J. 1.
J--1. (27)
2 If
Неравенство (27) является усло вием срабатывания обнаружителя скольжения (в данном случае обнару: ителя бокс.ования; . При этом выражение , стоящее в левой части неравенства (27), характеризует величину относительного скольжения первой колесной пары. Правая часть этогр неравенства характеризует порог чувствительности обнаружения скольжения. Таким образом, предлагаемое устройство осуществляет контроль относительной разности скоростей вращения колесных пар (т.е. контроль относительного скольжения).Заданный порог чувствительности обеспечивается установкой коэффициента деления выходного сигнала сглаживающего фильтра 5(6). Устройство работоспособно при любом количестве колесных пар транспортного средства; с помощью злемента ИЛИ 31 осуществляется выбор эталонной, (не скользящей) колесной пары для последующего сравнения ее скорости со скоростью каждой контролируемой колесной пары. Незначительные изменения в схеме устройства позволяют использовать его для обнаружения юза коленсых пар.
На фиг. 2 показана диаграмма работы обнаружения скольжения при пробоксовке первой колесной пары, причем крутизна характеристики тахогенератора 1 этой колесной пары меньше, чем крутизна характеристики тахогенератора 2 второй колесной пары (не боксующей.,
Для пояснения работы обнаружителя скольжения приняты следующие допущения: процессы изменения скороти UJ колесных пар и процессы изменения напряжения на выходах узлов -обнаружителя скольжения имеют разный масштаб времени, длительность переходных процессов во всех узлах схемы, кроме интеграторов, равна нулю, Различие в крутизне Характеристики техогенераторов завышено по сравнению с реально существукхци и значениями.
Как видно из диаграммы, работа обнаружителя скольжения происходит циклически. В начале каждого цикла интеграторы 15 и 16 сбрасываются в нулевое состояние, затем начинают интегрировать напряжения, поступающие с выпрямителей 3 и 4. На выхода сглаживакхцих фильтров 5 и 6 имеются напряжения, определяемые формулами (7) и (.14). Эти напряжения прямсепропорциональны крутизне характеристики соответствукяцего тахогенератора, но не зависят от скорости вращения
колесных пар. В момент времени, когда Напряжение U jдостигает уровня Oj (соответственно, когда {J достигает уровня ) происходит срабатывание компаратора 19(20).При отсутствии 5 скольжения (т.е. при равенстве скоростей колесных пар ) достижение указанными напряжениями соответствукяцих уровней происходит одновременно. Это объясняется тем, что при
10 изменении крутизны характеристики тахогенераторами в одинаковой сте(пени изменяется наклон проинтегрированной линии напряжения уровень, которого достигает выходное напря15 жение интегратора 15Цб ) в конце цикла. Таким образом, крутизна характеристики тахогенератора не влияет на длительность цикла работы устройства. .
0 При движении колесной пары без скольжения периодически срабагьавает компаратор 19(20), в то время как компаратор 11(12) постоянно находится в единичной состоянии. На выходе
25 элемента ЗАПРЕТ 23 (24 ) .имеется последовательность коротких импульсов (определяемых длительностью переходного процесса сброса интеграторов). Эти импульсы поступают на нулевой вход 29 (30) триггера 25(26) и удерживают его в нулевом состоянии, соответствующем отсутствию скольжения данной колесной пары.
Если какая-либо колесная пара начинает боксовать (первая колесная
5 пара на диаграмме), увеличивается
величина .напряжения на выходах тахогенератора 1 и выпрямителя 3,,Соответственно, увеличивается крутизна наклона линии напряжения и., на вы0 ходе первого интегратора 15 и сокращается длительность положительного импульса на выходе второго интегратора 19. При достижении боксующей колесной парой определенной .угловой
5 скорости напряжение достигает уровня и, что приводит к срабатыванию первого компаратора 11. При этом со,отношение скоростей боксующей (пер1вой) и не боксующей (второй) колес Q ных пар, т.е. величина относительiHoro скольжения, определяется формулой (27). Срабатывание компаратора 11 приводит к появлению положительного импульса на выходе элемента ЗАПРЕТ 21 и триггер 25 устанавливается в единичное состояние, соответствукядее наличию избыточного скольжения первой колесной пары. В этом состоянии триггер 25 удерживается до тех пор, пока не появятся импульсы на выходе
0 элемента ЗАПРЕТ 21, т.е. пока не
выполнится условие (22 (, а следовательно, иусловие (27.
Предлагаемое устройство позволяет обнаружить избыточное скольжение
5 каждой колесной пары в отдельности.
В то врекя как в устройстве-прототипе такая возможность отсутствует.
Преимущество предлагаемого устройства по сравнению с базовым объектом, за который принят прототип, заключается также в отсутствии погрешности разбоса амплитудных характеристик тахогенераторов. Более высокая точность позволяет использовать предлагаемый обнаружитель скольжения для создания противобоксовочных и противоюзных систем .подвижного состава.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения скольжения колесных пар подвижного состава | 1982 |
|
SU1050925A1 |
| Устройство контроля скольжения колесных пар подвижного состава | 1981 |
|
SU969563A1 |
| Устройство для определения скорости вращения колесной пары транспортного средства | 1982 |
|
SU1084157A1 |
| Устройство обнаружения избыточного скольжения колесных пар подвижного состава | 1981 |
|
SU982939A1 |
| Устройство для обнаружения юза колесных пар подвижного состава | 1984 |
|
SU1245452A1 |
| Устройство для обнаружения скольжения колесной пары транспортного средства | 1985 |
|
SU1299847A1 |
| Система автономного электроснабжения | 1985 |
|
SU1343537A1 |
| Устройство для обнаружения скольжения колесной пары | 1982 |
|
SU1184706A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| Устройство регулирования скорости электродвигателя | 1983 |
|
SU1125600A1 |
ОБНАРУЖИТЕЛЬ СКОЛЬЖЕНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА, содержащий на каждуюконтролируемую колесную пару синхронный тахогенератор с выпрямителем на выходе сглаживающий фильтр и компаратор, отличающийся тем, что, с целью повьшения точности, он снабжен на каждую «контролируемую колесную пару дополнительными выпрямителем и компаратором, интеграторами, элементами ЗАПРЕТ и триггером и общим для всех колесН1 1х пар элементом ИЛИ, подключенным своими входами к выходам дополнительных «компараторов. а выходом - к одним из входов элементов ЗАПРЕТ и к одним из входов ОД них из интеграторов, другой вход каждого из которых соединен с выходом выпрямителя, а выход - с одними из входов дополнительного и основного компараторов« выход последнего из которых соединен с другими входами элементов ЗАПРЕТ, соединенных своими выходами с входами триггера, при этом выход каждого синхронного тахогенератора подключен с к входу другого интегратора, выход которого через дополнительный выпря- -митель соединен с входом сглаживаю- f/ щего фильтра, соединенного выходом с другими входами основного и дополнительного компараторов.
Ф
фие.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для защиты тепловоза с электрической передачей от боксования | 1960 |
|
SU135911A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
