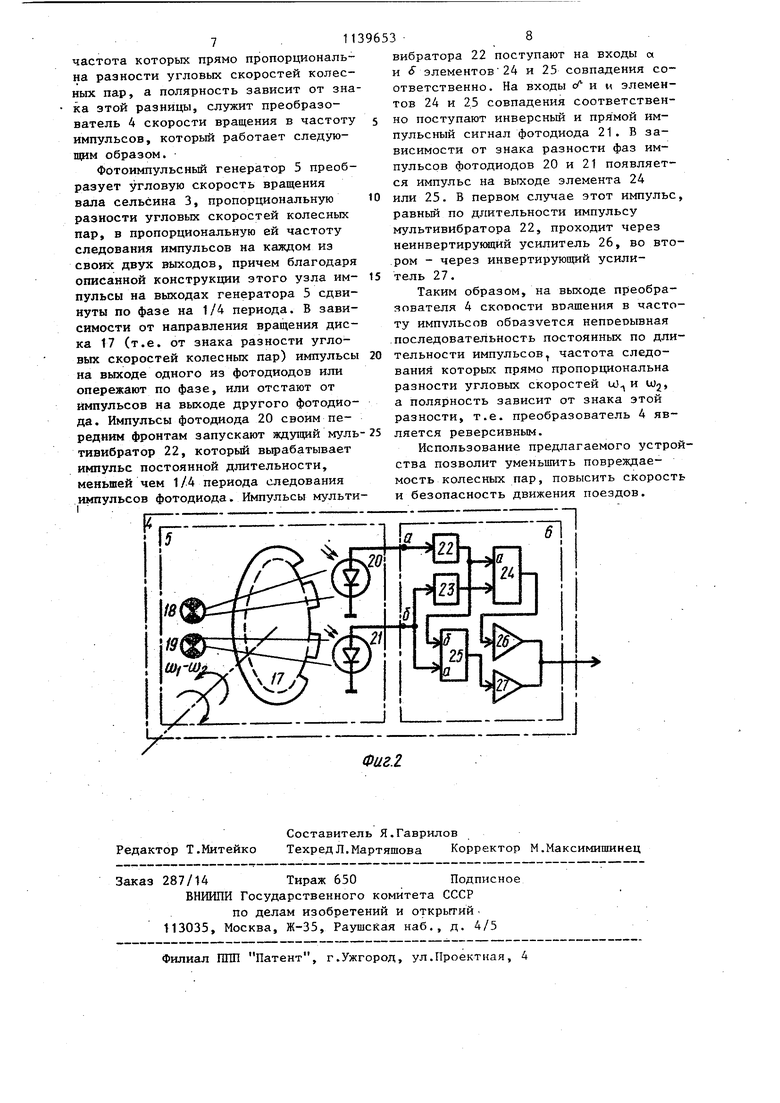
1 1 Изобретение относится к железнодорожному транспорту, а именно к сис темам противобоксовочной и противоюэной защиты подвижного состава, и может быть применено на локомотивах электропоездах и других видах железнодорожного подвижного состава. Известно устройство для загциты от боксования и юза колес транспортного средства, содержавшее датчики Угловой скорости колесных пар, связанные с блоком сравнения, к выходу которого подключен преобразователь скорости вращения в частоту импульсов, последовательно с которым включены интегратор и блок памяти, а также исполнительный блок, генератор импульсов, выход которого связан с управляющими входами интегратора и блока памяти, и задатчик режи ма движения транспортного средства 1. Однако в известном устройстве (ес ли диаметры защищаемых колесных пар не равны между собой) при измерении абсолютного скольжения возникает погрешность. Целью изобретения является повышение точности. Цель достигается тем, что устройство для защиты от боксования и юза колес транспортного средства, содержащее датчики угловой скорости колес ных пар, связанные с блоком сравнения, к выходу которого подключен преобразователь скорости вращения в частоту импульсов, последовательно с которым включены интегратор и блок памяти, а также исполнительный блок генератор импульсов, выход которого связан с управляющими входами интегратора и блока памяти, и задатчик р.ежима движения транспортного средства, снабжено сумматорами, ключом, блоком умножения и дополнительным блоком памяти, информационный вход которого совместно с суммирующим входом первого сумматора подключен к выходу первого блока памяти, а управляющий вход и выход соответственно соединены с выходом задатчика режима движения транспортного средства и вычитающим входом первого сум матора, соединенным с одним из входов блока умножения, выход которого подключен к вычитающему входу второ го сумматора, суммирующий вход кото рого соединен с выходом первого сум матора, к которому подключен другой 32 вход блока умножения, а к выходу второго сумматора подключен информационный вход ключа, управляющий вход которого соединен с выходом генератора импульсов, а выход - с исполнительным блоком. На фиг. 1 представлена функциональная схема устройства для защиты от боксования и юза колес транспортного средства; на фиг. 2 - принципиальная схема преобразователя скорости вращения в частоту импульсов. Устройство для защиты от боксования и юза колес транспортного средства содержит датчики 1 и 2 угловой скорости колесных пар, в качестве которых используются сельсины, злектрически связанные с блоком 3 сравнения, в качестве которого используется дифференциальный сельсин, преобразователь 4 скорости вращения в частоту импульсов, состоящий из фотоимпульсного генератора 5, связанного с валом дифференциального сельсина, и формирователя 6 разнополярных импульсов, к выходу которого подключены соединенные последовательно интегратор 7 и блок 8 памяти. К последнего подключены информационный вход блока 9 памяти и суммирующий вход а сумматора 10, к выходу которого подключены суммирующий вход си сумматора 11 и вход а блока 12 умножения, вход 5 которого совместно с вычитающим входом 5 сумматора 10 соединен с выходом блока 9 памяти, а выход - с вычитающим входом 5 сумматора 11. К выходу последпего подключен информационным входом ключ 13, управляющий вход которого совместно с управляющими входами интегратора 7 и блока 8 памяти соединен с выходом генератора 14 импульсов, а вьрсод - с исполнительным блоком 15, включающим сглаживающий фильтр, Управляющий вход блока 9 памяти соединен с выходом задатчика 16 режима движения транспортного средства. Фотоимпульсный генератор 5 состоит из малоинерционного диска 17 (фиг. 2) с прорезями, связанного с валом дифференциального сельсина, осветителей 18 и 19 и фотодиодов 20 и 21. Осветитель 18 с фотодиодом 20 образуют одну оптическую пару, а осветитель 19 с фотодиодом 21 - другую, причем оптические оси этих пар 3 смещены друг относительно друга на расстояние, не кратное половине шаг зубчатого диска (например, равное четверти шага). Выходы фотодиодов 2 и 21, являющиеся выходами фотоимпульсного генератора, подключены со ответственно .к входам а к Б формиро вателя 6 разнополярных импульсов, который содержит ждурдий мультивибра тор 22, логический инвертор 23,эле менты 24 и 25 совпадения, неинверти рующий усилитель 26 и инвертирующий усилитель 27, выход которого соединен с выходом усилителя 26 и являет ся выходом формирователя 6 разнополярных импульсов. Вход ждущего муль тивибратора 22 является входом а фо мирователя 6, а вход логического ин вертора 23 соединен с входом « элемента 25 совпадения и является входом 6 формирователя 6. Выход ждущег мультивибратора 22 соединен с входом а элемента 24 совпадения и входом 5 элемента 25 совпадения, выход которого соединен с входом инвертирующего .усилителя 27. Выход логичес кого инвертора 23 соединен с входом 5 элемента 24 совпадения, к вых ду которого подключен входом неинвертирующий усилитель 26. I Предлагаемое устройство работает следующим образом. Валы сельсинов 1 и 2 вращаются со скоростями и и соответствующих колесных пар, диаметры которых соот/ветственно равны D и Dj. Вал дифференциального сельсина 3 вращается со скоростью ди), равной дш u)- ujj.(1) С такой же скоростью вращается диск фотоимпульсного преобразователя 4, на выходе которого формируется непрерывная последовательность импульсов, полярность которых зависит от направления вращения диска (т.е. от знака 4ut), а частота f этих импульсов равна f K(u},-UJ2) , (2) где К - коэффициент пропорциональности. Данная последовательность импульсов поступает на информационный Bxof интегратора 7, крторьм интегрирует во времени входной импульсный сигнал в промежутке между поступлениями на управляющий вход сигнала от генератора 14, а при поступлении указан34ных сигналов на управляющий вход осу1)1ествляется сброс интегратора в нулевое положение. В конце каждого цикла интегрирования Напряжение Uна выходе интегратора 7 равно u -K-yf T , где К - коэффициент пропорциональности ; Т, - период следования импульсов 14. генератора 14. Управляющие импульсы, вырабатываемые генератором 14, во всем диапазоне частот их следования имеют достаточно большую скважность, т.е. Tl4t 14 где tц - длительность импульса генератора 14. Период Т следования импульсов генератора 1-4 равен периоду Тз сигнала датчика 2, так как этим сигналом осуществляется запуск генератора 14 . . Период Т обратно-пропорционален угловой скорости ш вращения второй колесной пары: i4 2L ur; (5) 2 где К - коэффициент пропорциональности. учетом (2), (3), (5) и того, что iu)(uV+t«)V),де V2 - абсолютное скольжение; V/H V2 окружные скорости колесных пар; D - относительная разность диаметров колесных пар, напряжение на выходе интегратора .равно V-(1+dD)-V6 V огда транспортное средство движется режиме выбега, , поэтому наряжение U7 в режиме выбега равно и K2K ICjtfD.(7) Это напряжение с выхода интеграора 7 поступает на информационный ход блока 8 памяти, на управляющий ход которого, как и на управляющий ход интегратора 7, поступают сигнаы от генератора 14. По сигналу поледнего блока памяти передает а свой вькод то значение входного апряжения, которое имелось в момент оступления управляющего сигнала. ля того, чтобы одним и тем же сигналом от генератора 14 произвести пере дачу выходного напряжения интегратора 7 через блок 8 памяти и сброс интегратора 7 в нулевое состояние, на управляющем входе интегратора 7 предусмотрен элемент задержки. С выхода блока 8 памяти сигнал поступает на информационньй вход бло ка 9 памяти и на суммирующий вход сумматора 10. На управляющий вход блока 9 памяти поступает в режимах тяги и торможения непрерывный сигнал от задатчика 16 режима движения. При этом блок 9 памяти передает на свой выход то значение входного напряжени которое бьшо в момент начала поступления управляющего сигнала. При отсутствии управляющего сигнала (т.е. в режиме выбега) блок 9 памяти передает на выход текущее значение входного напряжения. Выходное напряжение блока 9 памяти поступает на вы читающий вход сумматора 10. Таким образом, в режимах тяги или торможения (т.е. в тех режимах, когда возможно проскальзьшание колесньк пар) напряжение U на выходе сумматора 10 равно разности двух напряжений . напряжения U-,, обусловленного наличием скольжения колесной пары в данный момент времени, и напряжения U которое бьшо зафиксировано запоминаю щим узлом 9 в режиме выбега и обусловлено разницей диаметров колесньк пар U, / (8) Используя формулы (6) и (7),получаем , ( Выходное напряжение U сумматора 10 и и 7 з апоминающего узла 9 перемножаются перемножителем 12, выходное напряжение U. которого равно Wr- 2lVAf-Ь ) ° где КАЛ козффициент пропорциональности . Значение козффициента К устанав ЛпЬается исходя из следующего условия; (11) 12 Напряжения U и U, поступают соответственно ни суммирующий и вычи тающий входы второго сумматора 11, напряжение U на выходе которого с учетом (16), (17) и (18) равно )1 (2 Напряжение Ц поступает на информационный вход ключа 13, управляемого импульсами генератора 14. Выходное напряжение ключа равно входному напряжению во время действия управляющего импульса и равно, нулюво время паузы. Среднее значение Dg выходного напряжения ключа 13 за период следования управляющих импульсов t,. 13 11 т С учетом формул (11) и (19) получаемV. 2V2 - Поскольку (4), то из (14) получаем ;y,-V2)l-(c)2.1 4V-4V(ABfl2, где - коэффициент пропорциональности . Среднее значение U выходного напряжения ключа 13 вьцтеляется с помощью сглаживающего фильтра в блоке 15. Следовательно, напряжение И на выходе фильтра (в блоке 15) равно (2)l , (,,) где К - коэффициент пропорциональности. Выходной сигнал устройства пропорционален сумме двЗгх величин: измеряемой величины - абсолютного скольжения uV и некоторой погрешности которая равна aV(crD) 2 . Приняв , что соответствует предельно допустимому расхождения диаметров колесных пар в условиях эксплуатации, получаем величину погрешности ДУ(сЛП)2 0,p004uV, т.е. ошибка измерения во всем диапазоне скоростей постоянна и составляет 0,0004 измеряемой величины, что значительно меньше, чем в известном устройстве, где погрешность линейно зависит от ifD. Для получения на входе интегратора 7 последовательности импульсов, частота которых прямо пропорциональна разности угловых скоростей колесных пар, а полярность зависит от зна ка этой разницы, служит преобразователь 4 скорости вращения в частоту импульсов, который работает следующим образом. Фотоимпульсньй генератор 5 преобразует угловую скорость вращения вала сельсина 3, пропорциональную разности угловых скоростей колесных пар, в пропорциональную ей частоту следования импульсов на каждом из своих двух выходов, причем благодаря описанной конструкции этого узла импульсы на выходах генератора 5 сдвинуты по фазе на 1/4 периода. В зависимости от направления вращения диска 17 (т.е. от знака разности угловых скоростей колесных пар) импульсы на выходе одного из фотодиодов или опережают по фазе, или отстают от импульсов на выходе другого фотодиода. Импульсы фотодиода 20 своим передним фронтам запускают ждущий муль тивибратор 22, который вьфабатывает импульс постоянной длительности, меньшей чем 1/4 периода следования импульсов фотодиода. Импульсы мульти 11 38 вибратора 22 поступают на входы а и 5 элементов 24 и 25 совпадения соответственно. На входы сЛ и U элементов 24 и 25 совпадения соответственно поступают инверсный и прямой импульсный сигнал фотодиода 21. В зависимости от знака разности фаз импульсов фотодиодов 20 и 21 появляется импульс на выходе элемента 24 или 25. В первом случае этот импульс, равньш по длительности импульсу мультивибратора 22, проходит через неинвертирукщий усилитель 26, во втором - через инвертирующий усилитель 27. Таким образом, на выходе преобразователя 4 скосости впашения в частоту импульсов обоазуется непрерывная последовательность постоянных по длительности импульсов, частота следования которых прямо пропорциональна разности угловых скоростей и) и uij, а полярность зависит от знака этой разности, т.е. преобразователь 4 является реверсивным. Использование предлагаемого устройства позволит уменьшить повреждаемость колесных пар, повысить скорость и безопасность движения поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от боксования и юза | 1975 |
|
SU541690A1 |
| Устройство контроля скольжения колесных пар транспортного средства | 1982 |
|
SU1022842A1 |
| Устройство обнаружения боксования и юза колес транспортного средства | 1986 |
|
SU1371933A1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
| Устройство для обнаружения юза и боксования @ колесных пар подвижного состава | 1991 |
|
SU1772010A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Цифровое устройство для обнаружения юза и боксования | 1977 |
|
SU725918A1 |
| Устройство защиты от боксования и юза электроподвижного транспорта | 1981 |
|
SU1008025A1 |
| Устройство противобоксовочной и противоюзовой защиты тягового электропривода | 1986 |
|
SU1318444A1 |
УСТРОЙСТВО ДЛЯ ЗЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчики угловой скорости колесньпс пар, связанные с блоком сравнения, к выходу которог подключен преобразователь скорости вращения в частоту импульсов, последовательно с которьм включены интегратор и блок памяти, а также исполнительный блок, генератор импульсов, выход которого связан с уПравляюпшми входами интегратора и блока памяти, и задатчик режима движения транспорт ного средства, отличающе е-с я тем, что, с целью повышения точности, оно снабжено сумматорами, ключом, блоком умножения и дополнительным блоком памяти, информационный вход которого совместно с суммирующим входом первого сумматора подключен к выходу первого блока памяти, а управляющий вход и выход соответственно соединены с выходом задатчика режима движения транспортного средства и вычитающим входом первого сумььчтора, соединенным с одним из входов блока умножения, выход которого подключен к вычитающему входу второго сумматора, суммируиций вход которого соединен с выходом первого сумматора, к которому подключен другой вход блока умножения, а к выходу второго сумматора подключен информационный вход ключа, управляюп(ий вход которого соединен с выходом генератора импульсов, а выход - с исполнительным блоком.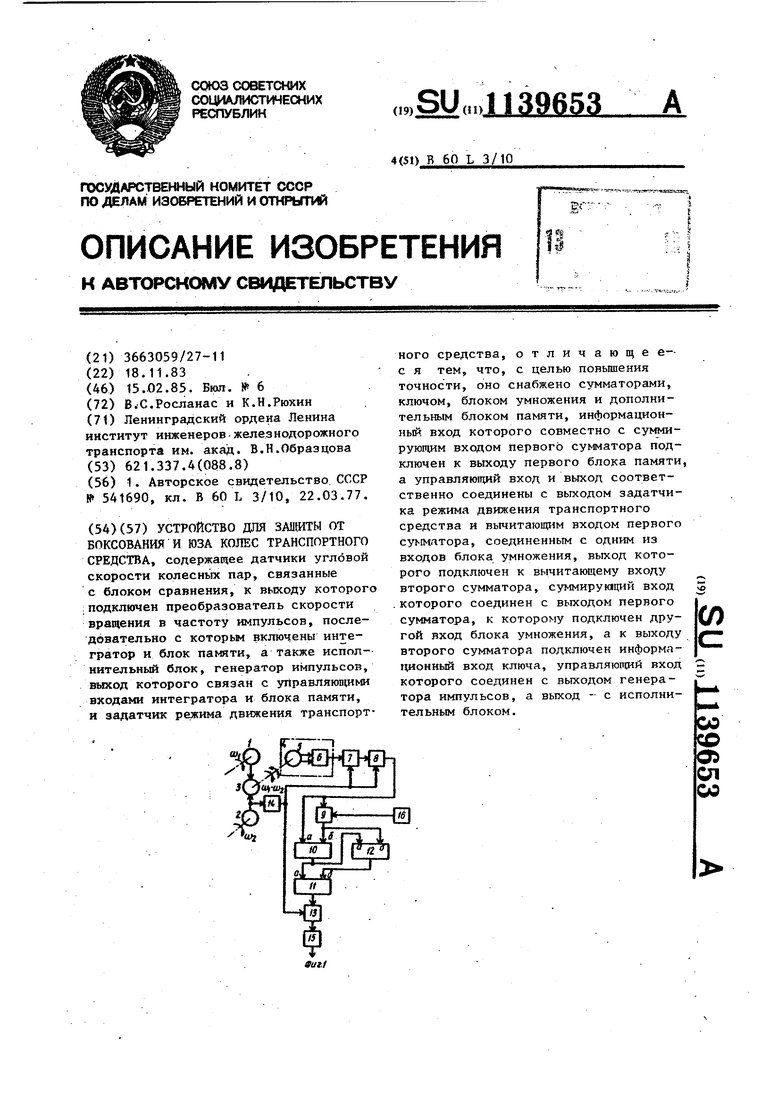
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для защиты от боксования и юза | 1975 |
|
SU541690A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
