f1245452
Изобретение относится к железноожному транспорту, а именно к сисам тфотивоюзной защиты подвижно -- состава, и.может быть применено любых железнодорожных транспортных
ск ме бо ко до вн ря тя же
средствах, колесные пары которых оборудованы индивидуальными тормозами с раздельным электрическим управлением.
Известно устройство для обнаружения юза колесных пар подвижного состав а, содержащее на каждую колеснздо пару датчик скорости, состоящий из последовательно соединенных импульсного тахогенератора и формирователя выходного сигнала, и подключенный одним из входов к выходу формировате ля блок сравнения, а также общие для всех колесных пар формирователь эталонного замедления подвижного состава, сумматор и блоки задержки и выделения экстремального сигнала, вы- выкод которого соединен с другими входами блоков сравнения и с одним из входов сумматора, выход которого подключен к входу блока задержки, соединенного выходом с одним из входов блока вьщеления, экстремаль- .ного сигнала, другие входы которого подключены к выходам соответствующих формирователей выходньк сигналов датчиков скорости. Точность работы известного устройства во многом определяется характеристиками датчика скоростей вращения колесной пары. Этот датчик выполнен в виде импульсного тахогенератора с преобразователем частоты в напряжение и характеризуется большой точностью, что обусловлено высокой разрешающей способностью (количеством импульсов на один оборот) импульсного тахогенератора П .
Для обеспечения надежной зшдиты колес от повреждений вследствие юза и для достижения кратчайшего тормозного пути обнаружитель юза должен, помимо точности, обладать достаточным быстродействием. При использовании датчика скорости на основе импульсного тахогенератора быстродействие будет ограниченб из-за наличия преобразователя частоты в напряжение который вносит большую задержку из- за своей инерционности, обусловленной использованием сглаживающего фильтра с большой постоянной времени Чем вьипе требования к статической точности (уровню пульсаций) датчика
5
0
скорости, тем больше постоянная времени сглаживающего фильтра и тем большую задержку (достигаю1ц то нескольких десятков и даже сотен периодов импульсной последовательности) вносит преобразователь частоты в напряжение. На средних и низких скоростях движения указанная задержка может составлять 0,5-1,0 сек, а замедление колесной пары.у входящей в юз, тем больше, чем ниже скорость движения, поэтому недостаточное быстродействие известного устройства может привести к заклиниванию колесной пары. .
Цель изобретения - повьппение быстродействия устройства.
Л;ля достижения указанной цели устройство для обнаружения юза колесных пар подвижного состава, содержащее на каждую колесную пару датчик скорости, состоящий из .последовательно соединенных импульсного тахогенератора и формирователя
5 выходного сигнала, и подключенный одним из входов к выходу формирователя блок сравнения, а также общие Д.ПЯ всех колесных пар формирователь эталонного замедления подвижного состава, сумматор и блоки задержки и вьщеления экстремального сигнала, выход которого соединен с другими входами блоков сравнения и с одним из входов сумматора, выход которого подключен к входу блока задержки, соединенного выходом с одним из входов блока вьщеления экстремального сигнала, другие входы которого подключены к выходам- соответствующих формирователей выходных сигналов дат- чиков скорости, снабжено блоками перемножения и формирования сигнала, обратно пропорционального квадрату эталонной скорости, вход которого подключен к выходу блока выделения
экстремального сигнала, а выход - к одному из входов блока перемножения, другой вход которого соединен с выходом (}юрмирователя эталонного замедпения, а выход - с другим вхо- W дом сумматора, причем формирователь выходного сигнала датчика скорости выполнен в виде преобразователя дли- тельпости периода следования им- .пульсов в напряжение.
5 Совокупность всех введенных узлов и их взаимных соединений позволяет получить в пpe u aгaeмoм устройстве положительный эффект по сравнению с
0
5
известным, выражающийся в увеличени быстродействия при сохранении точноти в широком диапазоне скоростей. Предлагаемое устройство как и извесное позволяет осуществлять индиви- дуальньш контроль относительного скольжения, в том числе и при одновременном юзе всех колесных пар.
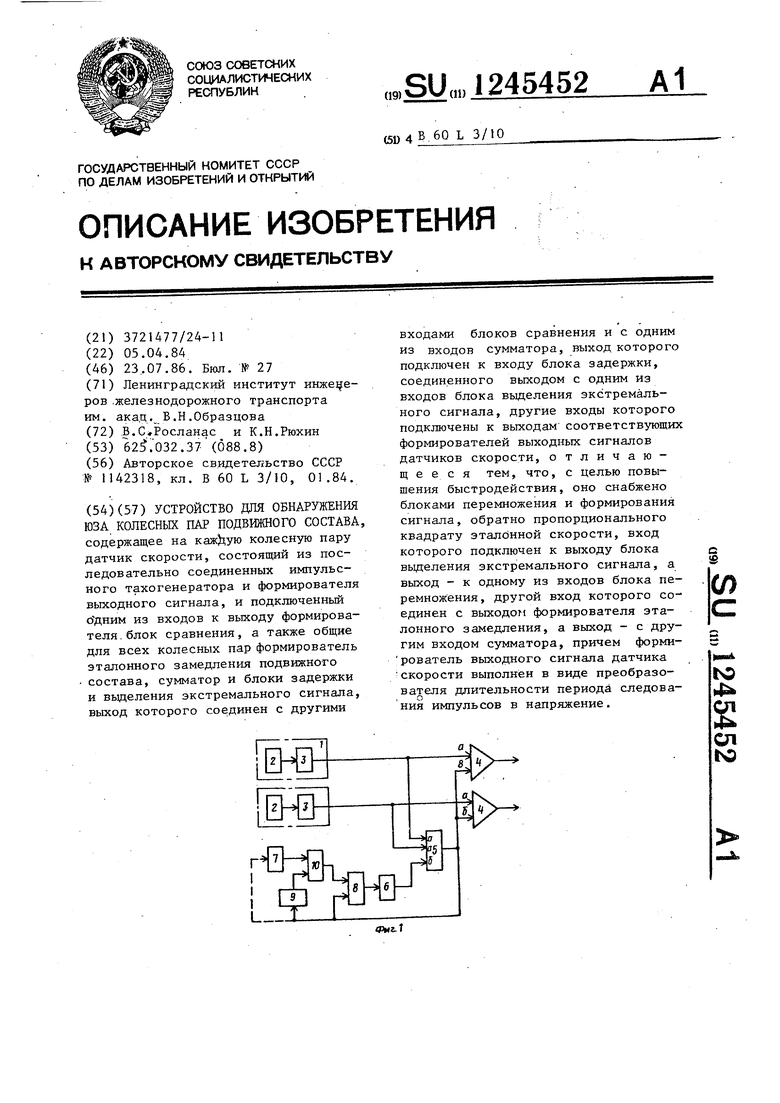
На фиг. 1 показана структурная схема устройства для обнаружения юз колесных пар подвижного состава; на фиг. 2 - функциональная схема одного из вариантов выполнения формирователя эталонного замедления повижного состава.
Устройство для обнаружения юза подвижного состава содержит на каждую колесную пару датчик 1 скорости состоящий из импульсного тахогене- ратора 2 с подключенным к его выходу преобразователем 3 периода в напряжение, и блок 4 сравнения. Устройство содержит также общие для всех колесных цар блок 5 выделения минимального напряжения , блок 6 задержки, формирователь 7 эталонного замедления подвижного состава, суммато 8 блок 9 формирования сигнала, обратно пропорционального эталонной скорости и блок 10 перемножения.
Выход каждого преобразователя 3 периода в напряжение соединен с входом а. блока 4 сравнения и с входами а блока 5 вьщеления минимального напряжения, выход которого соединен с .входом S каждого блока 4 сравнения а также с входом л сумматора 8 и со входом блока 9. Выходы блока 9 и формирователя 7 соединены с входами блока 10 перемножения, выход которого подключен к входу S сумматора 8. Выход сумматора 8 через блок 6 задержки подключен к входу S блока 5 вьзделения минимального напряжения. Выходы блоков 2 сравнения являются выходами устройства.
Формирователь 7 эталонного замедления -может быть выполнен в виде источника постоянного напряжения, датчика линейного замедления транспортного средства или функционального преобразователя. В последнем случае (фиг.2) формирователь 7 эталонного замедления содержит сумматоры 11 и 12 и узел 13 деления, выход которого является выходом формирователя 7. Входы а сумматоров 11 и 12 объединены и являются входом формирователя 7 подключенным к выходу блока 5 выде
ления минимального напряжения. Входы S сумматоров 11 и 12 также обьедине- ны и подключены к источнику постоянного напряжения и„. Выходы сумматоров 11 и 12 соединены с входами узла 13 деления.
Устройство для обнаружения юза подвижного состава работает следующим образом,
Импульсньй тахогенератор 2 вырабатывает непрерывную последовательность импульсо в, период Tj следования которых обратно пропорционален мгновенному значению Vt скорости вращения соответствующей колесной пары 2.1
Kj
V;
(1)
где К, - постоянный коэффициент, оп- ределяемьш конструкцией та- хогенератора 2; i - номер колесной пары. Преобразователь 3 периода в напряжение вырабатывает непрерывньй (или ступенчато-непрерывньй) сигнал, напряжение U которого прямо пропорционально периоду Т следования входных импульсов
V т t
К Vi
(2)
где K.J и К эффициенты.
- постоянные ко
При этом быстродействие преобразователя 3 периода в напряжение, обусловленное его конструкцией, значительно превышает быстродействие преобразователя частоты в напря-- жениез применяемого в известном уст- р эйстве (задержка преобразования не превышает двух периодов следования входных импульсов).
Напряжения и„- с выходов преобразователей 3 поступают на соответст- в ующие входы блока 5 выделения минимального напряжения. На один из входов блока 5 поступает напряжение U с выхода блока б задержки. На выходе блока 5 образуется эталонное напряжение Up Ug 5 равное минимальному из всех входных напряжений:
55
Ug Ug. мин(и,
.)(3)
Если по крайней мере одна из колесных пар транспортного средства не
проскальзывает (т.е. имеется эталонная колесная пара) то
из; 6
(4)
тогда формула (3) примет вид
и Us
мин и,. .
(5)
Напряжение Ug U с выхода блока 5 поступает на вход 5 каждого блока 4 сравнения, на вход а. которого поступает напряжение Ujj от преобразователя 3 соответствующей колесной па- ры. Каждое из сравниваемых напряжений и эталонное напряжение U обратно пропорциональны величинам соответствующих скоростей.
Блок 4 сравнения выполнен в виде компаратора отношения. Он вырабатывает .управляющий сигнал на своем выходе в том случае, когда отношение напряжений на его входах превьшает определенное пороговое значение.
Таким образом, устройство производит индивидуальньй контроль скольжения колесных пар и посылает управляющий сигнал в тормозную систему той колесной пары, величина относительного скольжения которой превысит заданный порог срабатывания.
При одновременном юзе резко уменьшается скорость V вращения всех колесных пар, соответственно увеличивается период Т следования импульсов техогенераторов 2 и напряжение и преобразователей 3 периода в напряжение . Б этом случае минимальным из всех входных напряжений блока 5 становится напряжение Ug, поступающее с выхода блока 6 задержки, таким образом, в рассматриваемом режиме согласно формуле (3)
мин (Uj. ,
и.)
и
с(6)
Блок 6 задержки осуществляет задержку входного сигнала на времяТ . 50 Поэтому мгновенное значение напряжения и (t) будет определяться форму- лой:
U6(t) Ug(t -t),
нап матора 8,
где и., - напряжение на О
В свою очередь
Ug и. и,„(8)
V,,, K,()
U,K(U,/,
где и Ug и - напряжения на выходах формирователя 7 эталонного замедления, блока 9 и блока i О перемножения ;
постоянные коэф фициенты.
Используя формулы (6- 8;), получим
UgCt) U(t -t) + .Ct -Г)u;(t -7)1 .
(9)
; -При достаточно малой величине задержки 1: получим
.lA..,),, (,о,
Разделив переменные и проинтегрировав имеем
-uilt) u,(t)dt.c. (lU
где t - текущее, значение времени, отсчитываемое от момента срыва сцепления последней ко- лесной пары; С - постоянная интегрирования.
Параметры Kg. и К можно подобрать таким образом, чтобы выполнялось условие
45
3 0 -Г,
(12)
а постоянную С интегрирования определим из условий:
тогда формула (.11) с учетом (2) и
(14) будет иметь вид
t
V,v(t) V,. - ij U(t) dt,(i3 где Уз (t) ° и 7ГТ - условная эталонная скорость.
Из формулы (15) следует, что при одновременном юзе всех колесных пар условная эталонная скорость V изменяется во времени в соответствии с текущим значением напряжения U формирователя эталонного замедления Следовательно, выбирая соответствую- 1цие параметры и схему формирователя 7, можно придать условной эталонной скорости любой желаемый вид.
Если транспортное средство оборудовано тормозами колодочного типа, то расчетное замедление В, при торможении функционально связано со скоростью движения следующей приближенной формулой:
B.V
В
90 i + cV
где В
30
- замедление транспортного средства при нулевой скорости (т.е. в момент остановки);
а и с - постоянные коэффициенты определяемые характеристиками тормозной системы транспортного средства. Для такого транспортного средства формирователь 7 эталонного за- медления может быть выполнен в виде функционального преобразователя, схема которого приведена на фиг.2. На его вход поступает напряжение 8х э которое подается на вхо- ды а сумматоров 11 и 12, а на входы В постоянное напряжение Выходные напряжения U и U сумматоров равны
Uc Ue, oi и +-U
(13)
eгде o - постоянный коэффициент.
Напряжения U, и U, поступают на узел 13 деления, выходное напряжение и которого прямо пропорционально частному от деления его входных напОЯЖР.НИЙ
% -к, . 06)
17
6Х
где Kjj - постоянный коэффициент.
Параметры U , о(. и К формирователя 7 выбираются исходя из следующих соотношений:
и Tf iJ
с;
(17)
К
о
Т В
0
i
20
где а, с и В, - параметры, входящие в формулу (14).
Тогда, учитывая, что И 11,, - , из (16) и (17) получаем выраV.
эч
жение для выходного сигнала формирователя 7
- Г В
§ i biitl
90 а + с V, (t)
(18)
Сопоставляя формулы (18) и (14) видим, что выходное напряжение формирователя 7 эталонного замедления прямо пропорционально в каждый мо мент времени расчетному замедлению Б,, транспортного средства при данной скорости его движения.
Значение условной эталонной скорости в этом случае, рассчитанное по формулам (13) и (18) , будет, составлять
t
V,v ()
So
в .( oJa+ cV-.. (t) 35
40
(19)
Таким образом, сравнение скорости каждой колесной пары С условной эталонной скоростью производится с такой же точностью, как и в известном устройстве 6 При :этом обеспечиваются лучшие динамические показатели устройства в целом. Это относится как к случаю одновременного юза всех колесных пар, так и к случаю, когда по крайней мере одна из колесных пар не проскальзывает.
Редактор А.Сабо
Составитель Я.Гаврилов Техред Н.Бонкало
3949/10
Тираж 647 . Подписное ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор М.Шароши
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения юза колесных пар транспортного средства | 1984 |
|
SU1142318A1 |
| Устройство для обнаружения скольжения колесных пар подвижного состава | 1982 |
|
SU1050925A1 |
| Противоюзная система железнодорожного вагона | 1985 |
|
SU1306771A1 |
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
| Устройство обнаружения избыточного скольжения колесных пар подвижного состава | 1981 |
|
SU982939A1 |
| Устройство контроля скольжения колесных пар транспортного средства | 1982 |
|
SU1022842A1 |
| Устройство для обнаружения юза и боксования @ колесных пар подвижного состава | 1991 |
|
SU1772010A1 |
| Устройство для обнаружения скольжения колесных пар подвижного состава | 1983 |
|
SU1184708A1 |
| Устройство для обнаружения юза и боксирования колесной пары электроподвижного состава | 1977 |
|
SU743904A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |

| Устройство для обнаружения юза колесных пар транспортного средства | 1984 |
|
SU1142318A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
