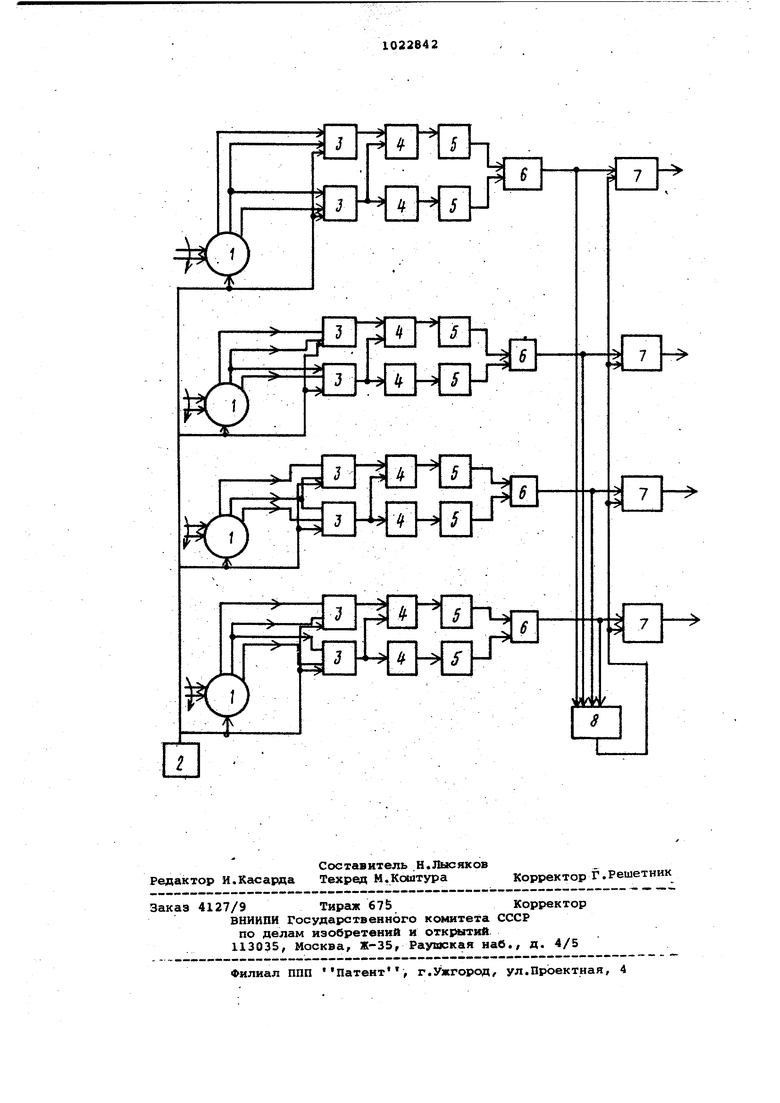
Изобретение относи ся к транспорту, в частности к устройствам для контроля скольжения колесных пар транспортных средств, и может быть ис пользовано на электроподвижном, состй ве для реализации максимально возмож ных по условиям сцепления сил тяги и торможения, а также для защиты от юза и боксования. Известно устройство для контроля скольжения колесных пар транспортного средства, содержащее датчики частоты вращения колесных пар, представ ляющие собой однофазные сельсины, ро .торные обмотки которых подключены к .источнику переменного напряжения, а Ьтаторные обмотки связаны с блоком сравнения 1. Недостатком указанного устройства является его значительная погрещност в определении величины боксования ко лесных пар, так как определяется тол ко разность частот вращения двух колесных пар локомотива независимо от скорости движения. Цель изобретения - повышение точности путем определения относительной величины скольжения. Поставленная цель достигается тем что устройство для контроля скольжения колесных пар транспортного средства, содержащее датчики частоты вра щения колесных пар, предетавляквдие собой однофазные сельсины, роторные обмотки которых подключены к источни ку переменного напряжения, а статорные обмотки связаны с блоком сравнения, снабжено фазочувствительными выпрямителями, линейными фильтрами, квадратичными преобразователями, сум маторами и блоком выделениямаксимального сигнала, при этом статорные Ъбмотки каждого сельсина подключены к одним из входов двух соответствующих фазочувствительнЕЛх выпрямителей, дру гие входы которых соединены систочником переменного напряжения, причем выход одного фазочувствительного выпрямителя соединен с одним из входов одного линейного фильтра, а выход другого - с другим входом одного и входом другого линейного фильтра, со диненных выходами с входами квадратичных преобразователей, выходы кото рых подключены к входам соответствую щего сумматора, выход каждого из которых соединен с одним из-входов со-. ответствукщего блока сравнения и одним из входов блока вьщеЯения максимального сигнала, которого под ;ключен к другим входам блоков сравнения. На чертеже представлена блок-схема устройства -для контроля скольжения колесных пар транспортного средства йа примере его выполнения для четырехосного транспортного средства Устройство состоит из однофазных сельсинов 1, установленных на колесныя парах транспортного средства. Источник 2 переменного напряжения соединен с роторными обмотками сельсинов 1 и одним из входов фазочувствительных выпрямителей 3, другие входы которых подключены к статорным обмоткам соответствующих сельсинов 1. Выходы выпрямителей 3 подключены к входам линейных фильтров 4, причем выход одного из них соединен с входами фильтров 4. Выходы фильтров 4 соединены с входами соответствующих квадратичных преобразователей 5/ выходы которых подключены к входам соответствующих сумматоров б. Выход каждого сумматора 6 соединен с одним из входов соответствующего блока 7 сравнения и с одним из входов блока 8 выделения максимального сигнала. Выход блока 8 подключен к другим входам блоков 7 сравнения. Устройство работает следукяцим образом. Сельсины 1 преобразуют частоту вращения колесных пар транспортного средства в переменное напряжение на его статорных обмотках в соответствии с выражениями Uc,j Um-cos cotcos SZt Llc Um-costut + l20°)CosS2t, где напряжение первой фазы статорной обмотки сельсина; DC, - напряжение второй фазы статорной обмотки сельсина; и „, - амплитуда выходно О напряжения сельсина, зависимость которой от напряжения питания можно выразить формулой , где и л, - напряжение питания; К - коэффициент пропорциональности между амплитудой выходного напряжения сельсина и напряжением питания; . (О - угловая скорость колесной пары, которая равиа W A-V, где V - линейная скорость колесной А - коэффициент пропорциональности, выраженный через радиус колеса R; -SI- круговая частота источника питания сельсина. Напряжения с выхода сельсина 1 подаются на фазочувствительныв выпрямители 3. Фаэочувствительные выпрямители 3 преобразуют напряжения с выходов тре фазной обмотки сельсина 1 в синусоидальные напряжения, амплитуды которых прямо пропорционгьпьны соответственно входным напряжениям фазрчувствительных выпрямителей 3, а знак изменяется при изменении фазы входного напряжения от нуля до 180 Выходные напряжения фазочувствительных выпрямителей 3 могут быть представлены в .виде I - - Ug UtnS o Jt U, llm-s n(wt4-120°), где иj, Uj - выходные напряжения фазочувствительных выпрямителей,, Линейный фильтр 4, к которому под ключены выходы обоих выпрямителей 3 суммирует напряжения U и U и произ водит интегрирование суммы напряжени и и Uj Н 2, (| .si л (wt+po irUm-cos uj U4 jU3dt - sin.coi, гдеОл - выходное напряжение линейн го фильтра; Т - постоянная времени интегра тора . Другой линейный фильтр интегриру ет напряжение U с выхода одного фа зочувствительного выпрямителя 3: II f II А J: , -coswt, где О5 напряжение на выходе линёй ного фильтра. В:функциональных квадратичных преобразователях 5 реализуется возведение в квадрат выходных напряжений соответствующих линейных фильтipoB 4, Результат работы функциональных квадратичных преобразователей 5 можно описать следующим образом 11 -V iiZ 2 . ,U.eina,t, К - передаточный коэффициент функционального квадратичного преобразователя; , UY - выходные напряжения со ответствующих функциональных квадратичных преобразователей. Далее аналоговый сумматор 6 склаД1лаае напряжения Ug и и и на его выходе получаем напряжение и -U +U - - iiJli - ilMr & 6 v где - постоянный коэффициент; выходное напряжение сумматора. Выходные напряжения других сумматоров 6 устройства контроля скольжения остальных колесных пар находятся аналогично где i - индекс, соответствующий 1-ой колесной паре. Введение новых элемейтов позволяет на выходе сумматоров 6 получать напряжение, свободное от оборотных пульсаций датчика скорости вращения, содержащее незначительные пульсации несущей частоты сельсина 1, так как они подавляются интеграторами, постоянная времени Т которых ничем не ограничена. В случае контроля скольжения при бркоовании, эталонной скоростью колесной пары считается наименьшая скорость из скоростей имеющихся колесных пар . - . V3 m (i Так как квадраты линейных скоростей колесных пар V обратно пропорциональны выходным напряжениям Ug,-, то для определения эталонного напряжения, напряжения Ug подаются на входы блока 8 выделения максимального сигнала, выполненного на диодах, общего для всех колесных пар. На выходе блока 8 выделения максимального сигнала получаем эталонное напряжение и$: . U3 maxtU8.,Ug2,...Ue), ., где Og, Ugj,, выходные напряжения сумматоров, соответствукщие первой, второй и т.д. колесным парам. Выходное напряжение и эталонное напряжение подаются на входы блока 7 .сравнения. Рассмотрим алгоритм работы блока 7 сравнения, префкставляющего собой компаратор. Выходное напряжение его соответствует логической единице, если 1 выполняется неравенствоaiUgi U
где а - постоянный коэффициент, и равно нулю, если-указанное неравенство не выполняется.
Подставим в неравенство выражение
...
V.
V;
Йосле сокращения получаем
(1
Э Представим aj в виде
а,(14)(,
ПодстаЗ м выражение (-хч) в (-)t) и лучим
Vi-Va
20
V,
или
где - пороговое значение скольжения;
oV - относительное скольжение контролируемой крлесной па- 6VJJ-I3,
Э
Таким образом, блок 7 своим выхо-5 дом воздействует на. исполнительный . орган в том случае, когда относительное скольжение S V превышает пороговое значение скольжения .
Применение новых элементов в предлагаемом устройстве для контроля скольжения колесных пар позволяет устранить недостатки известного устройства.
Известное устройство jyiH контроля скольжения при разных диаметрах колес колесных пар .воздействует на исполнительный орган, даже если отсутствует скольжение колес колесных пар. Этот недостаток, который приводит к увеличению погрешности, устраняется в предлагаемом устройстве путем перехода к новому алгоритму контроля.
В известном устройстве контролируется только абсолютное скольжение, т.е. по разности скоростей двух колесных trap определяется величина воздействия на исполнительный орган. В предлагаемом устройстве контролируется относительное скольжение колесных пар, что значительно уменьшает влияние изменения диаметров колес на работу блока контроля и его точность.
Технико-экономическая эффективность от использования предлагаемого устройства по сравнению с известным (за базовый объект принимается протиэоюзное устройство DAKO-PE 1, изобретенное в ЧССР), заключается в повышении точности, снижении эксплуатационных затрат на подвижной состав, повышении скорости и безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения частоты вращения | 1981 |
|
SU1016739A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU732954A1 |
| Следящая система с комбинированным управлением | 1983 |
|
SU1136106A2 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Устройство для обнаружения юза колесных пар подвижного состава | 1984 |
|
SU1245452A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1987 |
|
SU1534477A1 |
| Следящая система | 1978 |
|
SU744435A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СКОЛЬЖЕНИЯ КОЛЕСНЫХ ПАР ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчики частоты врсвдения коЛесных пар, представляющие собой однофазные сельаины, роторные обмотки которых подключены к источнику переменного напряжения, а статорные обмотки связаны с блоком сравнения, отличающееся тем, что, с целью повышения точности путем определения относительной величины скольжения, оно снабжено фаэочувствительными выпрямителями, линейными фильтрами, квадратичными преобразователями, сумматорами и блоком выделения максимального сигнала, при этом статорные обмотки каждого сельсина подключены к одним из входов двух соответствующих фаэочувствительных выпрямителей, другие входы которых соединены с источником переменного нашряження, причем выход одного фазочувствительного выпрямителя соединен с одним из входов одного линейного фильтра, а выход другого - с другим входом одного и входом другого линейного фильтра, соединенных выходами с входами квадратичных преобразователей, выходы которых подключе-§ ны к входам соответствующего сумматора, выход каждого из которых соеди- tf нен с одним из входов соответствую- TJJ щего блока сравнения и одним из вхо- CI дов блока выделения максимального сигнала, выход которого подключен к S другим входам блоков сравнения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для защиты от боксования и юза | 1975 |
|
SU541690A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
