Изобретение относится к судостроению, в частности к устройствам для 11митации качки различных плавсредств.
Известен тренажер, содержагций качающуюся раму с приводом и системой управления, в котором испытываемый объект закрепляется на раме Яренадеер позволяет осуществлять спуск-подъем,наклоны и повороты по его курсу 11
Недостатком данного устройства является неврзможность имитации перемещения объекта с переменными амплитудно-частотными характеристиками, что имеет место в.случаях, когда объект снабжен гибкими тросами, связывающими его с другим плавучим или стационарным сооружением.
Известно также другое спускоподъемное устройство, содержащее качающуюся раму, консольно установленную на опорной платформе (корпусе судна), смонтированные на раме поворотные подъемные балки и лебедки объектовые тросы, запасованные одним концом на лебедку , а другим закрепленные на спускаемом за борт плавсредстве, рамовый трос, прикре- пле.нный к опорной платформе и консольной части упомянутой рамы, а также натяжную кулису переменной длины, оканчивающуюся роликом, и систему управления С 23.
Однако в известной установке необходима остановка лебедки при переходе от режима спуска к режиму подъема, что позволяет обеспечить только частичную имитацию качки.
Цель изобретения - повышение степени имитации качки.
Поставленная цель дйстигается тем, что в имитаторе качки, содержащем качак1щуюся раму, консольно установленную на опорной платформе, смонтированные на раме поворотные подъемные балки и лебедки, объектовы тросы, запасоваиные одним концом иа лебедку, а другим - закрепленные на спускаемом за 6opt плавсредстве, рамовый трос, прикрепленный к опорной платформе и консольной части упомянутой рамы, а также натяжную кулису переменной длины, оканчивающуюся роликом, и систему управления натяжная кулиса жестко закреплена на валу, .соединенном с источником крутящего момента, причем вал устанолен над опорной платформе) на высоте, 11ревышаю1 1ей максима/ ьиый габаptfT кулнсы, продолженной за нал в зеркальном отражении, кроме того, 5 рама связана с опорной платформой шарниром, натяжные кулисы устанЬвлены 3 линиях объектовых тросов каждой подъемной балки, при этом источники крутящего момента подключены
0 к сис.теме управления.
Кроме того, опорная платформа смонтирована на неподвижных опорах, а ее верхняя часть выполнена с возможностью поворота вокруг вертикальной
5 оси и снабжена водонепрсЛицаемой пласт НоЙ5 перекрывающей- контур опорной платформы по ширине и расстоянию до водной поверхности, причем опора консольной части рамы выполнена раз0 движной, а натяжная кулиса с источником крутящего момента и концевым узлом крепления рамового троса установлены на едином переносном фундаменте.
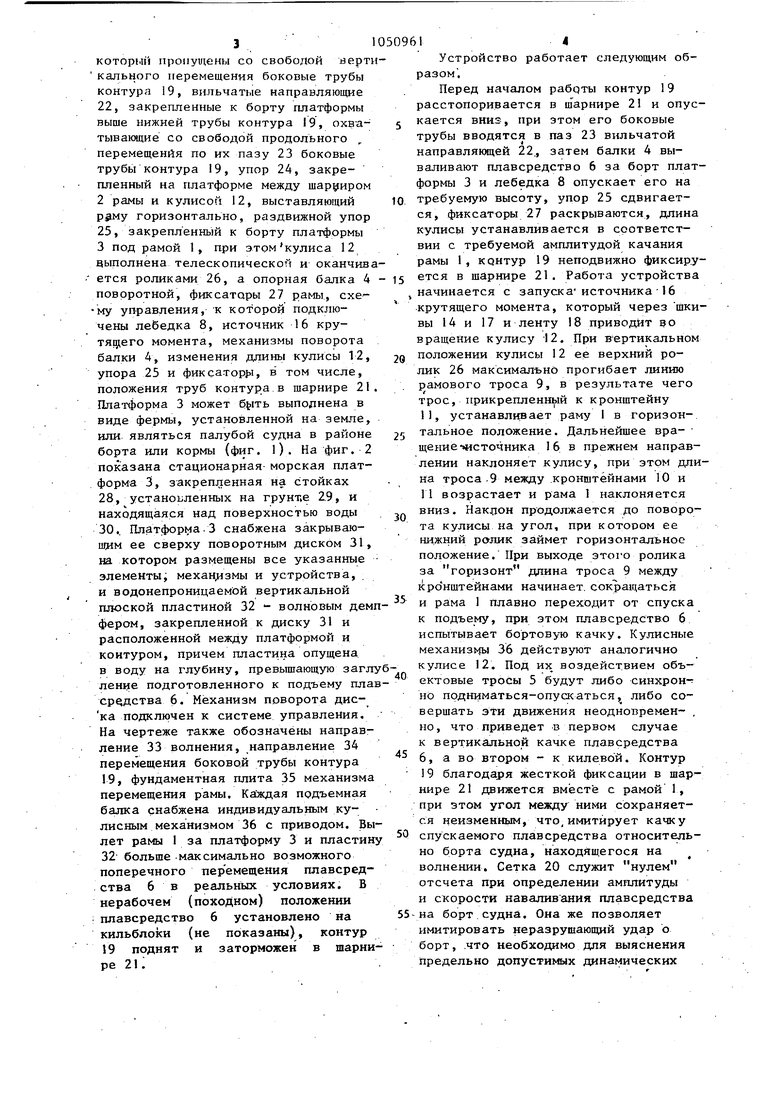
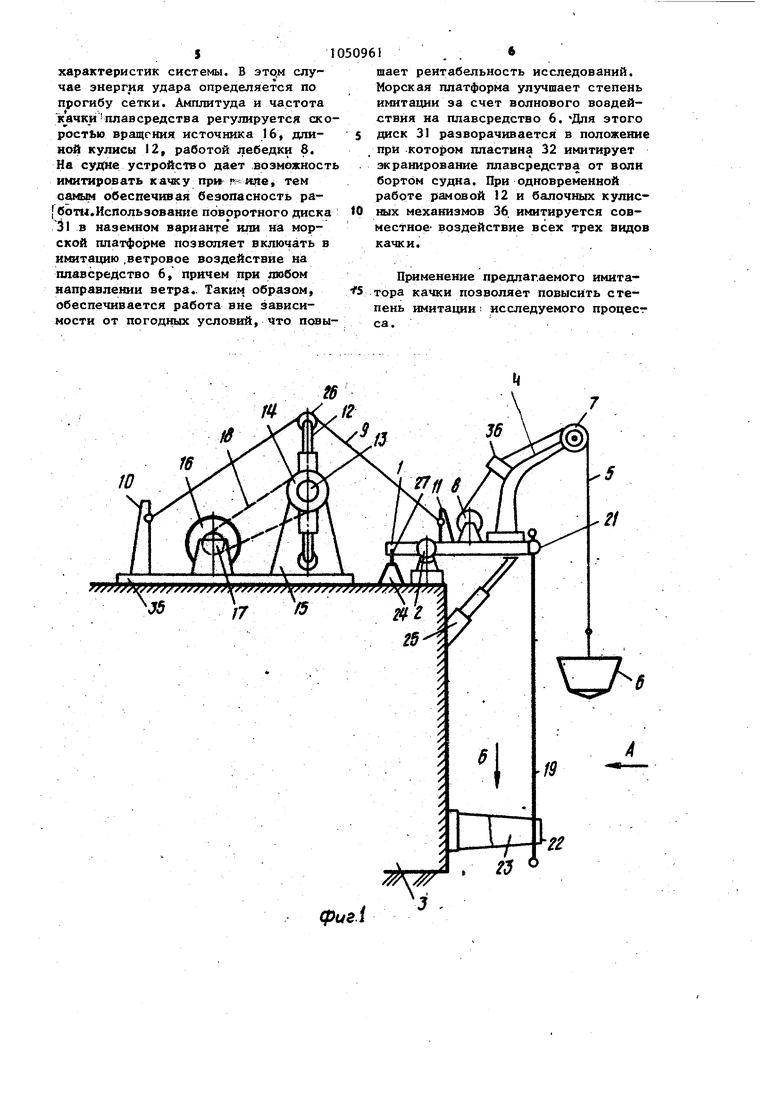
5 На фиг. 1 представлен предлагаемый имитатор, установленный на берегу или на судне, общий вид; на фиг.2то же, при установке на стационарной морской платформе; на фиг. 3 - вид
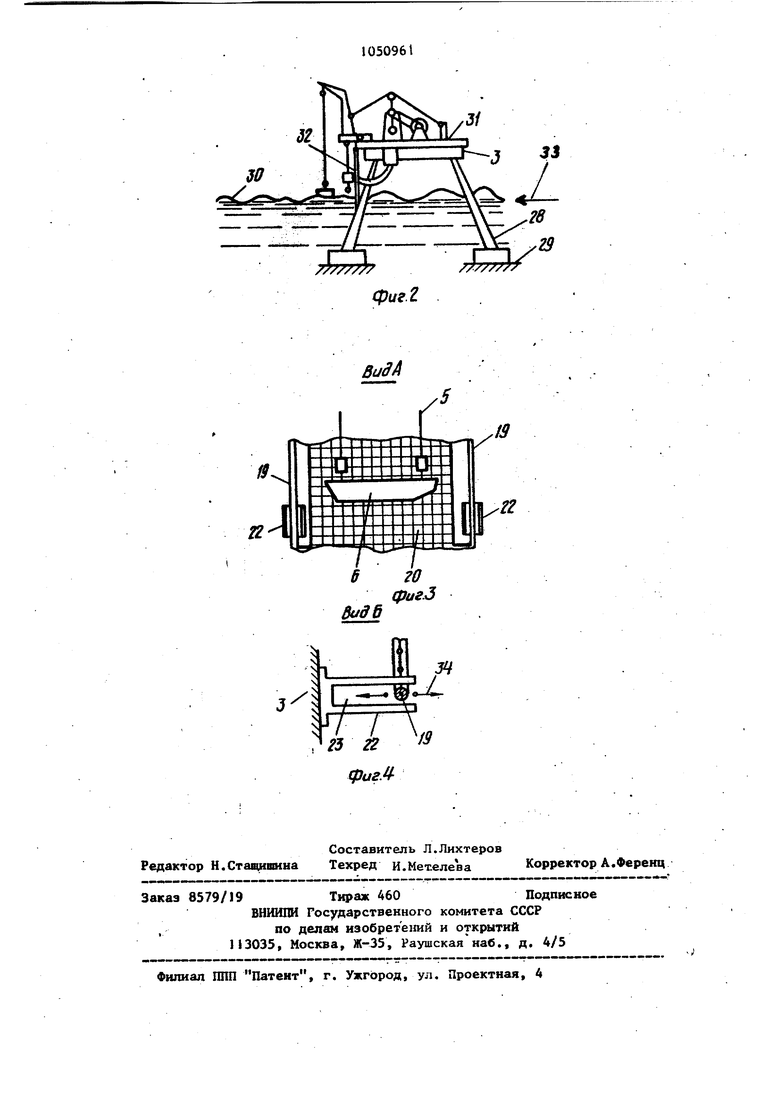
0 А на фиг. I; на фиг. 4 - вид Б на фиг. i.
Устройство содержит качающуюся раму 1, шарнир 2 между рамой иопорной платформой 3, подъемную балку Д,например шлюпбалку, объектовый трос 5, соединенный со спускаемым плавсредством 6 и запасованный через блоки 7 на подъемную лебедку 8, закрепленную на раме 1, механизм перемещения рамы, содержаищй рамовый трос 9, соединенный с кронштейном .10, закрепленным на платформе 3, и кронщте,йном 11, закрепленным на раме 1 и размещенным между шарниром 2 и плавсредством 6, натяжную кулису 12, снабженную проходящим через ее середину валом 13 с ведомым шкивом 14, установленным на опоре 15, закрепленной на платформе 3 между кронщтейнами 10 и 11 под рамовым тросом 9, источник 16 крутящего момента, снабженный
редуктором (не показан) и ведущим шкивом 17, Соединенным фрикционной лентой 18 с ведомым шкивом 14, трубча. тый контур 19, являющийся, имитатором 5 борта судна, сетку 20, закрепленную внутри контура, шарнир 21, прикрепленный к внешнему относительно края платформы торцу рамы, сквозь 3 KOTOpi.iii пропущены со свободой верт капьного перемещения боковые трубы контура 19, вильчатые направляющие 22, закрепленные к борту платформы выше нижней трубы контура 19, охватываюцие со свободой продольного перемещения по их пазу 23 боковые трубы контура 19, упор 24, закрепленный на платформе между шарниром 2 рамы и кулисой 12, выставляющий psiMy горизонтально, раздвижной упор 25, закрепленный к борту платформы 3 под рамой 1, при этомкулиса 12 выполнена телескопической и оканчив ется роликами 26, а опорная балка 4 поворотной, фиксаторы 27 рамы, схему управления, к которой подключены лебедка 8, источник 16 крутящего момента, механизмы поворота балки 4, изменения длины кулисы 12, упора 25 и фиксатор} 1, в том числе, положения труб контура в шарнире 21 Платформа 3 может выполнена в виде фермы, установленной на земле, или являться палубой судна в районе борта или кормы (фиг. 1). На фиг. 2 показана стационарная- морская платформа 3, закрепленная на стойках 28, устаноБленных на грунт.е 2.9, и находящаяся над поверхностью воды 30.. Платформа. 3 снабжена закрывающим ее сверху поворотным диском 31, на котором размещены все указанные элементы; механизмы и устройства, и водонепроницаемой вертикальной плоской пластиной 32 - волновым дем фером, закрепленной к диску 31 и расположенной между платформой и контуром, причем пластина опущена в воду на глубину, превышающую загл ление подготовленного к подъему пла средства 6. Механизм поворота диска подключен к системе управления, На чертеже также обозначены направление 33 волнения, направление 34 перемещения боковой трубы контура 19, фундаментная плита 35 механизма перемещения рамы. Каждая подъемная балка снабжена индивидуальным кулисным механизмом 36 с приводом. Вы лет рамы 1 за платформу 3 и пластин 32 больше -максимально возможного поперечного перемещения плавсредства 6 в реальных условиях. В нерабочем (походном) положении плавсредство 6 установлено на кильблоки (не показаны), контур 19 поднят и заторможен в шарни ре 2. 1 Устройство работает следующим образом. Перед началом работы контур 19 расстопоривается в шарнире 21 и опускается вниз, при этом его боковые трубы вводятся в паз 23 вильчатой направляющей 22., затем балки 4 вываливают плавсредство 6 за борт платформы 3 и лебедка 8 опускает его на требуемую высоту, упор 25 сдвигается, фиксаторы 27 раскрываются, длина кулисы устанавливается в соответствии с требуемой амплитудой качания рамы 1, контур 19 неподвижно фиксир.уется в шарнире 21. Работа устройства начинается с запуска источника 16 крутящего момента, который через шкивы 14 и 17 и ленту 18 приводит во вращение кулису 12. При вертикальном положении кулисы 12 ее верхний ролик 26 максимально прогибает линию рамового троса 9, в результате чего трос, прикрепленнь1й к кронштейну И, устанавливает раму I в горизонтальное положение. Дальнейшее вра- щениечисточника 16 в прежнем направлении наклоняет кулису, при этом длина троса .9 между .кронштейнами 10 и 11 возрастает и рама 1 наклоняется вниз. Наклон продолжается до поворота кулисы на угол, при котором ее НИ.ЖНИЙ ролик займет горизонтальное положение. При выходе этого ролика за горизонт длина троса 9 между кронщтейнами начинает, сокращаться и рама 1 плавно переходит от спуска к подъему, при этом плавсредство 6 испытывает бортовую качку. Кулисные механиз 1 36 действуют аналогично кулисе 12. Под их воздействием объектовые тросы 5 будут либо синхронно подниматься-опускаться, либо совершать эти движения неодновремен , но, что приведет -в первом случае к вертикальной качке плавсредства 6, а во втором - к килевой. Контур 19 благодаря жесткой фиксации в шарнире 21 движется вместе с рамой 1, при этом угол между ними сохраняется неизменным, что, имитирует качку спускаемого плавсредства относительно борта судна, находяш.егося на волнении. Сетка 20 служит нулем отсчета при определении амплитуды и скорости наваливания плавсредства на борт.судна. Она же позволяет имитировать неразрушающий удар о борт, .что необходимо для выяснения предельно допустимых динамических характеристик системы, В это,м случае энергия удара определяется по прогибу сетки. Амплитуда и частота качкиплавсредства регулируется ск ростью вращения источника 16, длиной кулисы 12, работой лебедки 8. На судне устройство дает возможнос имитировать качку прик-аяе, тем оамьм обеспечивая безопасность ра боП4.Испольэоваш1е поворотного диск 31 в наземном вариаите или на морской ппатформе позволяет включать в имитацию .ветровое воздействие на плавсредство б, причем при любом направлеиии ветра.. Таким образом, обеспечивается работа вне зависимости от погодных условий, Что повы 1 . . шает рентабельность исследований. Морская платформа улучшает степень имитации за счет волнового воздействия на плавсредство 6. «Для этого диск 31 разворачивается в положение при котором хшастина 32 имитирует экранирование плавсредства от волн бортом судна. При одновременной работе рамовой 2 и балочных кулисных механизмов 36 имитируется совместное воздействие всех трех видов качки. Применение предлагаемого имитатора качки позволяет повысить степень имитации исследуемого процест са.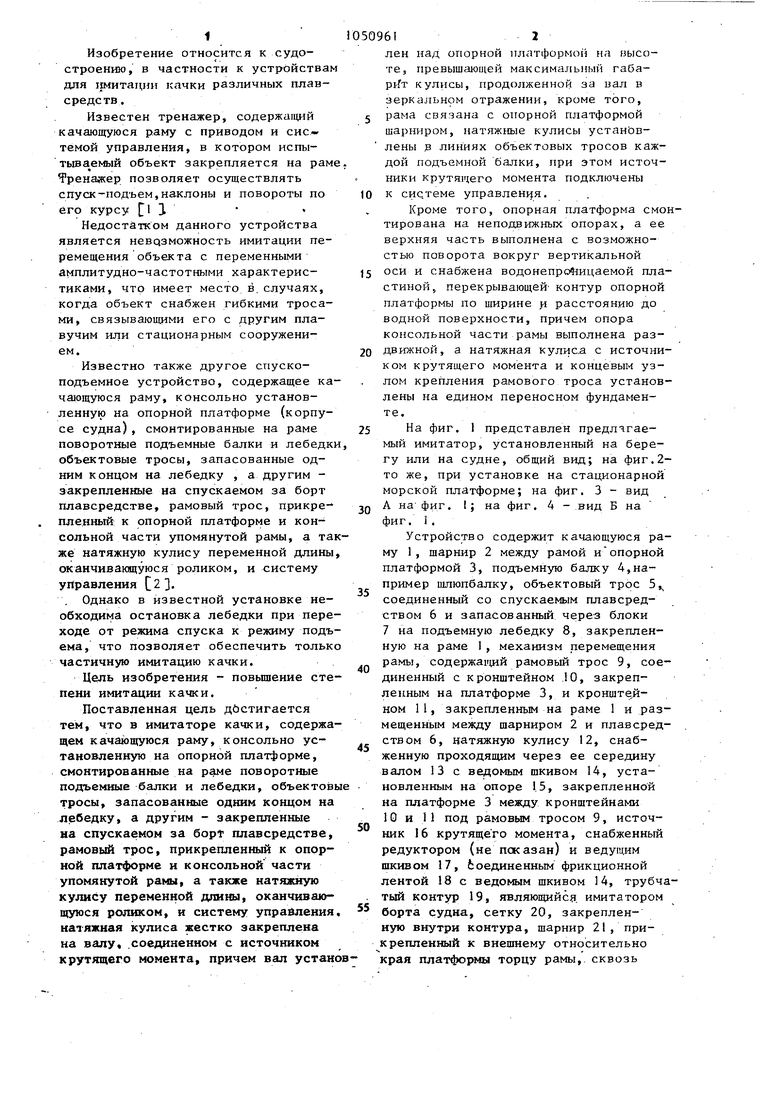
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для монтажа и демонтажа на стапеле движительно-рулевого комплекса судна | 1980 |
|
SU931577A1 |
| Транспортирующее устройство для проведения окрасочных и зачистных операций на борту судна | 1982 |
|
SU1104054A1 |
| Имитатор качки судна | 1985 |
|
SU1386512A1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| Буксирное устройство для бортовой сцепки плавсредств | 1987 |
|
SU1426888A1 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР И СПОСОБ ПОГРУЗКИ НА НЕГО ПАРОМА | 2006 |
|
RU2332322C1 |
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |
| Подводный пробоотборник | 1980 |
|
SU968319A1 |
| Землесосное судно | 1981 |
|
SU1093241A3 |
фиг1
