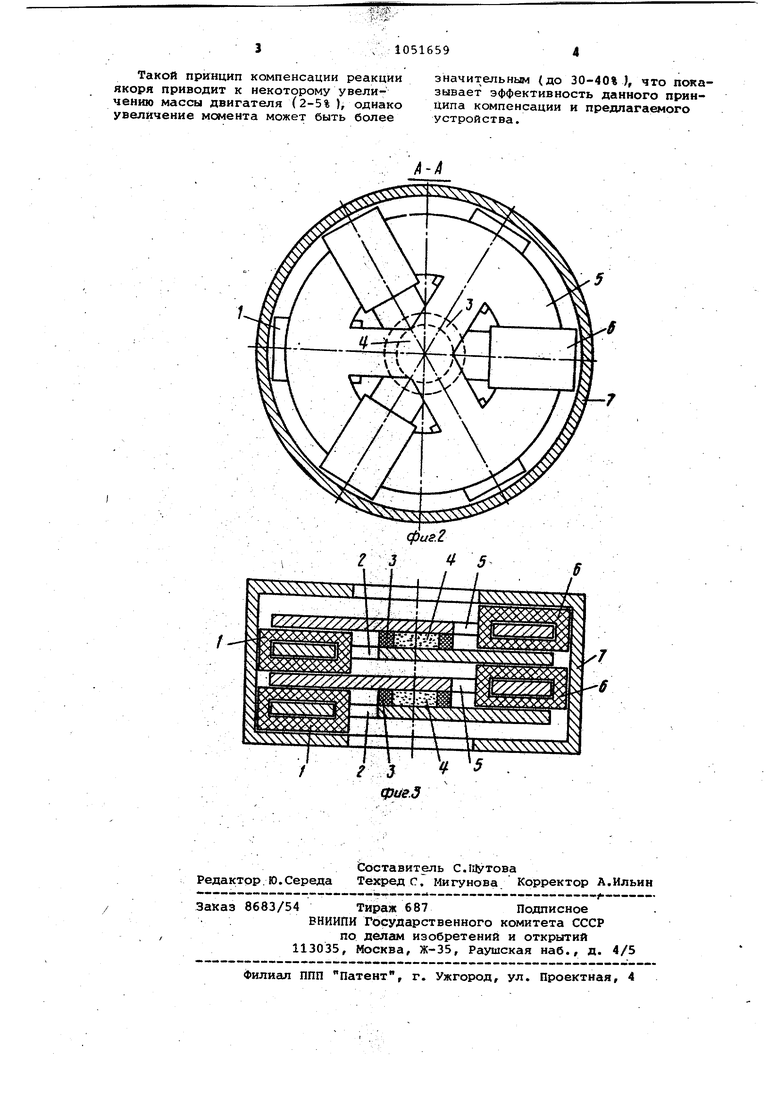
Изобретение относится к электромашиностроению, а более конкретно к моментным двигателям постоянного тока магнитоэлектрического типа с ограниченным углом поворота ротора. Моментные двигатели с ограниченным углом поворота ротора используются в различных системах автоматик в качестве исполнительных органов. По основному авт. св. № 828329 известен моментный двигатель постоя нЬго ток.а, в котором на обоих кольц вых магнитопроводах установлены обмотки управления, сдвинутые между собой на 180 эл. град., постоянный магнит размещен между направленными к центру выступами кольцевых магнитопроводов, а для компенсации сил магнитного тяжения между кольцевыми магнитопроводами, магнитный двигатель .постоянного тока (МДПТ) снабже внешним магнитопроводом, охватывающим кольцевые магнитопроводы с обмотками управления. Недостатком является то, что при малых углах поворота эта конструкция имеет на каждом кольцевом магни топроводе по несколько обмоток управления и такое же количество выступов, между которыми расположен постоянный магнит с осевым намагничиванием. При снижении величины рабочего угла резко возрастает влияние реакции якоря, так как увеличивается число катушек управления, а следовательно и действукидих на.магнит -размагничивающих его ампер-витков (ав ). 3to приводит к тому, что Нарушается равномерность- момента по углу: в начальный момент на:Магничивания момент несколько воз.растает, а в конце рабочего угла из за размагничивания резко снижается. i Цель ивобретения - повышение T04 ности йа счет уменьшения реакции .якоря и повышения развиваемого момен та,. , , ., - .. Указанная цель достигается тем. Что моментный двигатель постоянного тока снабжен охватывающей постоянный магнит компенсационной обмоткой, неподвижно Закрепленной между выступами кольцевых магнитойроводов, причем полярность указанной обмотки сов падает с папярностью магнитов. Расчвяг реакции якоря показывает, что максимальные ампер-витки реакции якоря для оптимального использования магнита и обмоток управления, когда рабочая точка находится в зоне кривой размагничивания, соответствующей максимальной энергии в рабочем зазоре мшаины, будут примерно равны половине йсех ав обмоток управления. Устраняя размагничивающее влияние реакций якоря,не только повыяаем равномерность развиваемого момента по углу поворота ротора, но и увеличиваем среднюю величину этого момента за счет исключения зоны угла спада момента что приводит к лучшему использованию МДПТ. Кроме того, появляется возможность , воздействуя на основной поток в машине, управляя им по определенному закону, устанавливать необходимую зависимость момента от тока управления, т.е. изменять крутизну выходной характеристики М f(3y) (М - выходной момент двигателя, ЗУ - его ток управления ). Это повышает эффективность использования МДПТ в следящих приводах за счет более гибкого управления выходным моментом, повышая функциональные возможности двигателя. На фиг. 1 показано предлагаемое устройство с ОДНОЙ парой магнитопроводов; на фиг. 2 - разрез А-А на фиг.. 1; на фиг. 3,- двигатель с несколькими магнитопроводов. Устройство содержит обмотку управленця (нижнюю } 1, кольцевой магнитопровод (нижний) 2, компенсационную обмотку 3, постоянный магнит 4, кольцевой магнитопровод (верхний) 5, обмотку 6 управления (верхнюю), внешний магнитопровод 7. На фиг. 1 показан вариант МДПТ с двумя парами внутренних кольцевых магнитопроводов с постоянными магнитами, закреплёйными между выступами кольцевь1Х магнитопроводов и двумя компенсирующими обмоткаг и,создающими намагничинающие ав , по величине равные размагничивающим ав реакции якоря. Так как ав реакции якоря обычно составляют от 10 до 40% ав обмотки упра вления, то размещение катушек с таким количеством ав не составляет трудности и они размещаются в двигателе без ущерба для рабочего угла. Нал;ичие компенсирующей обмотки приводит к увеличению развиваемого момента в среднем на10-30% за счет компенсации реакции якоря при фиксированной мощности потребления двигателя. При наличии нескольких пар внутренних кольцевых магнитопроводов компенсационные катушки размещаются вокруг каждого постоянного магнита. Включение компенсационной обмотки может быть последовательно или параллельно управляющим обмоткам, при этом для более точной настройки на компенсацию реакции якоря в номинальном реж11ме лучше всего иметь управляемый источник питания с регулируеMtaM выходным током или напряжением. С целью Исвдёжности обмотки управления и компенсационные обМотки лучше включать параллельно друг другу.
Такой принцип компенсации реакции якоря приводит к некоторому увеличению массы двигателя (2-5% ), однако увеличение момента может быть более
значительным (до 30-40% ), что показывает эффективность данного принципа компенсации и предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический моментный двигатель | 1983 |
|
SU1098084A1 |
| Моментный двигатель постоянного тока | 1979 |
|
SU828329A1 |
| Моментный двигатель постоянного тока | 1980 |
|
SU909767A1 |
| Магнитоэлектрический датчик момента | 1978 |
|
SU892592A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ИНТЕГРИРОВАННЫЙ ВЫСОКОТЕМПЕРАТУРНЫЙ СТАРТЕР-ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2583837C1 |
| МОМЕНТНЫЙ ДВИГАТЕЛЬ | 1998 |
|
RU2137280C1 |
| УНИВЕРСАЛЬНАЯ КОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2465707C2 |
| Моментный электродвигатель постоянного тока | 1981 |
|
SU978281A1 |
| Магнитоэлектрический моментный двигатель | 1989 |
|
SU1642557A1 |
МОМЕНТНЫЙ Д ГАТЕЛЬ ПОСТОЯННОГО ТОКА, по авт.св. 828329, о тличающийся тем, что, с целью повышения точности за счет уменьшения реакции якоря и повышения развиваемого момента, он снабжен охватывакицей постоянный магнит компенсационной обмоткой, неподвижно закрепленной между выступами кольцевых магнитопроводов, причем полярность указанной обмотки совпадает с полярностью магнитов.
