со
со со Изобретение относится к устройствам обучения и контроля мыслительной деятельности операторов, может быть применено в любых отраслях народного хозяйства, разрабатывающих и эксплуатирующих недетерминированные человеко-мащинные системы, а также в процессе проведения инженерно-психологических исследований в части отработки методов и средств по совершествованию и контролю текущего состояния оперативного мыщления операторов и является усовершенствованием изобретения по авт. св. № 959136. Цель изобретения - повышение эффективности тренажа путем обеспечения объективного контроля текущего состояния оперативного мышления операторов. На чертеже представлена блок-схема предложенного тренажера. Тренажер оператора содержит блок 1 моделирования объекта тренажа, вычислительный блок 2, блок 3 ручного управления, индикатор 4, генератор шума 5, имитатор 6 сигналов воздействия, первый блок 7 сравнения, блок 8 эталонных импульсных переходных функций, блок 9 формирования сигналов, блок 10 принятия решений, узел 11 регистрации, блок 12 сопряжения, узел 13 отображения информации, узел 14 памяти, дешифратор 15, второй блок 16 сравнения программный блок 17, коррелятор 18, узел 19 аналого-цифровых преобразователей, формирующий фильтр 20, узел 21 выделения оптимальных функций. После включения тренажер оператора работает следующим образом. Для совершенствования и контроля характеристик деятельности оператора, взаимодействующего с объектом тренажа 1 по детерминированной программе, в программном блоке 17 генерируются сигналы управляющих действий человека-оператора, которые с его выхода поступают на вход имитатора 6 сигналов воздействия, который в свою очередь формирует командные сигналы, подаваемые на первый вход блока 1 моделирования тренажа. Последний вырабатывает сигналы реакции, поступающие на вход индикатора 4, где и предъявляются оператору путем отображения и сигнализации, и на вход имитатора 6 сигналов воздействия с целью влияния на его логические элементы, с помощью которых устанавливаются условия имитируемой ситуации той или иной задачи.Оператор в соответствии с полученной информацией с индикатора 4 воздействует на органы ручного управления блока 3, который вырабатывает сигналы управляющих воздействий, поступающие с его выхода на вход объекта тренажа I. Кроме того, сигналы с блока 3 ручного управления, индикатора 4 и имитатора 6 сигналов воздействия с их выходов поступают на входы блока 9 формирования сигналов, в котором они преобразуются по амплитуде и дли30тельности для согласования режимов работы тренажера. Сигналы с его выходов подаются на вход первого блока 16 управления и вход программного блока 17. Для дальнейшего понимания сущности процесса контроля деятельности оператора отметим, что программа, генерируемая блоком 17, представляет собой матрицу позиционных двоичных кодов. Каждая строка матрицы соответствует программе отработки оператором той или иной задачи в зависимости от имитируемой ситуации. Каждый разряд строки соответствует номеру органа ручного управления блока 3. При этом значение «1 предписывается разряду в случае задействования по программе в определенные моменты времени соответствующего органа ручного управления блока 3, а значение «О - в случае его незадействования. Коды задействованных строк матрицы с выхода программного блока 17 переписываются в первый блок 16 сравнения, на другой вход которого с выходов блока 3 ручного управления, индикатора 4 и имитаторов 6 сигнала воздействия через блок 9 формирования сигналов по мере отработки оператором задачи поступают соответствующие электрические сигналы. В первом блоке 16 сравнения производится сравнение порядка поступления сигналов, излишние и недостающие сигналы, время поступления сигна-лов (раньше, позже) с их программными значениями. В случае отключения сигналы отклонения передаются на входы узла сопряжения 12 для кодирования и дальнейшего документирования в узле 11 регистрации, и одновременно данные сигналы поступают с другого выхода первого блока 16 сравнения на вход дешифратора 15, который преобразует коды двоичных сигналов признака строк и признаков отклонений в сигналы одноадресных кодов, поступающих с его выхода через узел 14 памяти на вход узла 13 отображения .информации для визуализации результатов работы оператора. Для соверщенствования и контроля текущего состояния оперативного мышления оператора в программный блок 17 введена соответствующая программа его эвристической деятельности. Сущность эвристической деятельности оператора заключается в том, процессе решения той или иной профессиональной задачи за требуемый промежуток времени оператору не может осушествить простой перебор всех возможных вариантов решения задачи. Поэтому для достижения цели, поставленной перед системой «Оператор-объект управления - среда, в целом оператору требуется найти соответствующую эвристику, необходимость выработки которой человеком-оператором можно проиллюстрировать на примере деятельности пилота. Допустим, что пилоту в соответствии с полетным заданием необходимо в турбулентной атмосфере выдержать заданную высоту, курс, скорость полета, а также требуется вывести ЛА в заданную точку воздушного пространства в предписанное время. Из условий полетного задания следует, что пилоту при простом переборе всех возможных вариантов сочетаний семи переменных задачи придется проанализировать 42 варианта, а при двухградационной характеристике (например, турбулентность атмосферы, скорость полета и т. д. может увеличиваться или уменьшаться) число перебора вариантов возрастает в геометрической прогрессии. Очевидно, если все логические условия задачи будут полностью пилотом анализироваться, то он не сможет найти за 2-3 с рационального решения, а тем самым пилоту для достижения цели потребуется каждый раз при решении игровой ситуации находить эвристику. На примере приведенного полетного задания покажем, как учитывать объективно текущее состояние оперативного мышления пилота предложенным устройством. Допустим, что пилот управляет среднемагистральным пассажирским самолетом (как объектом тренажа). Для определения эталонного (оптимального) состояния оперативного мышления, которым должен обладать реальный пилот в недетермированной системе «Пилот-ЛАсреда, необходимо найти параметры дополнительно введенных узлов - формирующего фильтра 20 и узла 21 выделения оптимальных функций. Формирующий фильтр 20, входящий в состав предложенного устройства, предназначен для формирования параметров воздействующих факторов среды на систему «Пилот-ЛА, в частности турбулентность атмосферы, имитируемой с помощью генератора шума. При выборе параметров указанного фильтра 20 учитывается тот факт, что для данного класса ЛА влияние турбулентности атмосферы на состояние динамики самолета выражается в изменении его углов атаки и скольжения и составляет в среднем 5-7 град. Исходя из приведенных значений изменения угла атаки и скольжения ЛА, по амплитудно-частотной характеристике самолета выбирается полоса пропускания частот и коэффициент передачи сигнала формирующего фильтра 20. При определении параметров узла 21 выделения оптимальных функций, характеризующих эталонное состояние оперативного мышления реального пилота, исходят из предположения, что пилот при управлении ЛА, который имеет удовлетворительные по управляемости и устойчивости характеристики, обладает аналогичными амплитудно-частотными характеристиками что и ЛА, возмущаемый средой. Тогда полоса пропускания частот и коэффициент передачи сигналов узла 21 выделения оптимальных функций соответствуют значениям полосы пропускания частот и коэффициента передачи формирующего фильтра 20. После определения параметров фильтра 20 и узла 21 рассмотрим методику оценки текущего состояния оперативного мышления пилота предложенным устройством, которое после включения работает следующим образом. Программный блок 17, в который заложена программа эвристической деятельности пилота, генерирует кодовые сигналы, амплитуда и длительность которых выбраны, в соответствии с амплитудно-частотной характеристикой ЛА и которые с его выхода подаются на вход имитатора 6 сигналов воздействия. На другой вход имитатора также 6 подводятся сигналы, сформированные с помощью генератора 5 шума и формируюшего фильтра 20. Поступившие на входы имитатора сигналы преобразуются в нем по амплитуде и, длительности в соответствии с амплитудно-частотными характеристиками ЛА. Далее с первого выхода имитатора 6 сигналы подаются через узел 19 аналого-цифровых преобразователей на один из входов коррелятора 18, на другой вход которого через узел 21 выделения оптимальных функций и узел 19 аналого-цифровых преобразователей также поступают соответствующие сигналы с тем, чтобы определить с помощью коррелятора 18 эталонную корреляционную характеристику, выражающую эталонное (оптимальное) текущее состояние оперативного мыщления испытуемого пилота. Коррелятор 18 по двум поступившим сигналам вычисляет указанную характеристику в виде импульсной переходной функции: h,(i y((i-t, где эталонная импульсная переходная функция, характеризующая требуемое состояние оперативного мышления реального пилота, усредненная по времени; x(t) - сигнал на входе блока 1 моделирования объекта тренажа; y(t - т)-сигнал на выходе фильтра 21 эталонных импульсных переходных функций. Сигнал /7э(т), представляющий произведение двух указанных сигналов, усредненных по времени, с выхода коррелятора 18 подводится на вход блока 8 эталонных импульсных переходных функций, где и запоминается. После того, как предложенным устройство.м было определено эталонное состояние оперативного мышления испытуемого пилоа, рассмотрим методику фиксации его текущего состояния мышления. С этой целью игналом, который сформирован в имитаоре 6, воздействуют на вход блока 1 моелирования объекта тренажа, сигналы реакии которого подаются на вход индикатора 4, где и предъявляются пилоту путем отображения и сигнализации, также сигналы реакции объекта тренажа 1 поступают на первый вход вычислительного блока 2. Оператор в соответствии с полученной стимульной информацией, поступившей на вход индикатора 4, воздействует на органы ручного управления воздействий, поступающие с его выходов на второй вход вычислительного блока 2. Сигналы, поступившие с индикатора 4 и блока 3 ручного управления на входы вычислительного блока 2, являются основой для определения текушего состояния оперативного мышления испытуемого пилота,которое в вычислительном блоке 2 определяется по следуюш,ему аналитическому выражению
) X(t}y(t - т),
где /1т{т) - импульсная переходная функция,
усредненная по времени и характеризуюшая текуш,ее состояние
оперативного мышления пилота;
x(t) - сигнал на выходе имитатора 6;
y(t - т) - сигнал реакции пилота на стимульную информацию, вынесенную на индикатор 4.
Сигнал /II(T), представляюший собой произведение стимульного сигнала x(t) и реакции пилота y(t - т), с выхода вычислительного блока 2 поступает на вход второго блока 7 сравнения, на другой вход которого с выхода блока 8 эталонных импульсных функций также поступает эталонный сигнал /13 (т), ранее вычисленный коррелятором 18. Во втором блоке 7 сравнения эти сигналы сравниваются, и сигнал разности текуш.его сигнала /II{T) и эталонного Лэ(т)
Дт /1э(т:) - Ы)
с выхода блока 7 поступает на вход блока 10 принятия решения, в котором по величине Дт выносится решение о соответствии текуш,его состояния оперативного мышления испытуемого пилота требуемому его состоянию, а результат решения блоком 10 отображается узлом 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора | 1983 |
|
SU1098024A1 |
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1211792A1 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
ТРЕНАЖЕР ОПЕРАТОРА по авт. св. № 959136, отличающийся тем, что. с целью повышения эффективности процесса тренажа путем обеспечения объективного контроля текущего состояния оперативного мышления оператора, он имеет коррелятор, узел аналого-цифровых преобразователей и узел выделения оптимальных функций, вход которого связан с первым выходом имитатора сигналов воздействия, а выход узла выделения оптимальных функций связан с первым входом аналогоцифровых преобразователей, второй вход которого соединен с первым входом блока моделирования объекта тренажа, а выходы узла аналого-цифровых преобразователей связаны через коррелятор с входом блока эталонных импульсных переходных функций.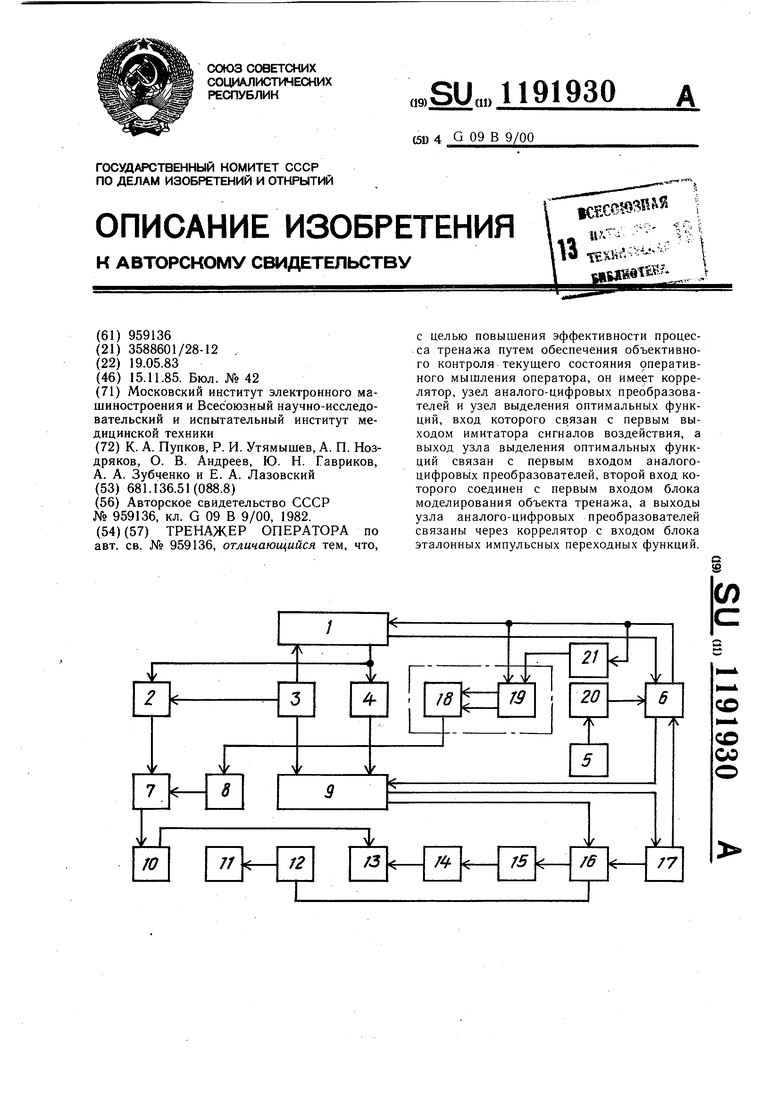
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
