Изобретение; относится к электротехнике и может быть использовано для защиты асинхронизированной синхронной машины от нестационарного режима при потере возбуждения из-за неисправности преобразователя систе мы возбуждения. Известен способ защиты синхронно маышны от асинхронного режима при потере возбуждения путем измерения тока возбуждения, сравнения его с заданной уставкой, Фиксации потери возбуждения (уменьшения тока возбуж дения до заданной уставки) и подачи сигнала на отключение машины от эне госистемы 13 , Недостаток данного способа заклю - чается в недоотпуске электроэнергии потребителю:при потере возбуждения иэ-за неисправности преобразователя системы возбуждения, Наиболее близким по технической сущности к изобретению является способ зашиты синхрокной машины от асин хронного режима при потере возбуящения,при котором измеряют ток возбуждения,сравнивают егос заданной уставкой, фиксируют наличие потери возбуяоде.ния (уменьшения тока возбу:1|одения ;ДО заданной уставки) и одновремэнн о с измерением тока возбуждения дополнительно измеряют ток статора синхронной машины, сравнивают его с заданной уставкой и в случае превъошения заданной.уставки подают сигнал на отключение, а в случае, когда ток статора меньше тока уставки, подают сигнал, запрещающий срабатывание защиты. Защита асинхронизированной синхронной машины осуществляется путемизмерения полного тока (модуля тока) возбуждения, создаваемого токами обмоток возбуждения машины, сравнения его с заданной уставкой, фиксации наличия потери возбуждения и подачи сигнала на отключение машины от энергосистемы 23. Недостаток известного способа заключается в недоотпуске электроэнергии потребителю при потере возбуждения из-за неисправности преобразователя системы возбуищения, связанном с отключением машины от энергосистемы при потере ее возбуждения что обуславливает низкие функциональ ные возможности защиты асинхронизированной синхронной машины известным способом. Цель изобретения - расширение функциональных возможностей защиты асинхронизированной синхронной машины путем перевода последней при по тере возбуждения из-за неисправности преобразователя системы возбуждения в синхронный режим.. Поставленная цель достигается тем, что согласно способу защиты синхронной машины при потере возбуждения, основанному на контроле токов возбуждения и фиксации наличия потери возбуждения, в качестве контролируемого токового пар 1метра используют ток тиристорных преобразователей, К роме того, дополнительно.измеряют скольжение, сравнивают его с критическим значением, определяемым условиями сохранения динамической устойчивости машины при переводе ее в синхронньай режим, и после достижения машиной критического скольж;е- ; ния контролируют прохождение тока в преобразователях через максимум и а момент достижения током в исправном преобразователе максимз ма выводят из работы все остальные преобразователи, после чего осуществляют работу асинхронизированной синхронной машины в синхронном режиме. На фиг. 1 представлена структурная схема системы управления асинхронизированной синхронной машины; на фиг. 2 - диаграммы изменений во времени выпрямленных токов,преобразователей) на фиг. 3 и 4 - зависимости .активной Мощности асинхронизированной синхронной машины от скольжения при различных установках . гулятора возбуждения; .на фиг. 5 .г блок-схема устройства дли реализа-. ции предлагаемого способа. . Асинхронизированная:синхронная машина имеет две пространственно сдвинутых на ЭО обмотки 1 и 2 возбужцения, на каждую из которых от двух тиристорных преобразователей 3,4 и 5, б подаются напряжения, сдвинутые на 90 эл. град.и изменяющиеся по гармоническому закону с частотой скольжения. Преобразователи 3 и 4, как и преобразователи 5 и 6, включены встречно-параллельно. Регулятор 7 служит для управления возбуждением асинхронизированной синхронной машины по заксну,.которых может быть преставлен в операторной форме и (з1д- с 5;со5(ЛМ) (-1) , ))(Vo,S|sifi(c/ - l}-kE, (2J где IL , - напряжение на обмотках 1 и 2 возбуждения; к - коэффициент обратной связи по токам, Ё, Б обмоток 1 и 2 возбуждения ) ei.Q - уставка по скольжению S машины; di коэффициент регулярова; ния по скольжению; «Г - электрический угол меж ду поперечной осью ротора машины и вектором напряжения энергосистемы;А - фаза х егулирЬвания.
Способ осуществляется следуицик образом.
В нормальном режиме работы маишны в соответстаии с законами управлеиия (1) .и (2) в каждый момент времени одhя из двух тиристорных прербраэователейг питающих обкютки 1 и 2 воэбу1кг.еиия, работает в выпрямительном режиме, а другой - в ин- ерторном.
Таким образом, ток в обмотке 1 возбуждения равен сумме токов преобразователей 3 и 4 соатветственно, а .ток в обмотке 2 возбу ения г cyMMie токов Е,|.и В, преобра;|ователай 5 и 6.
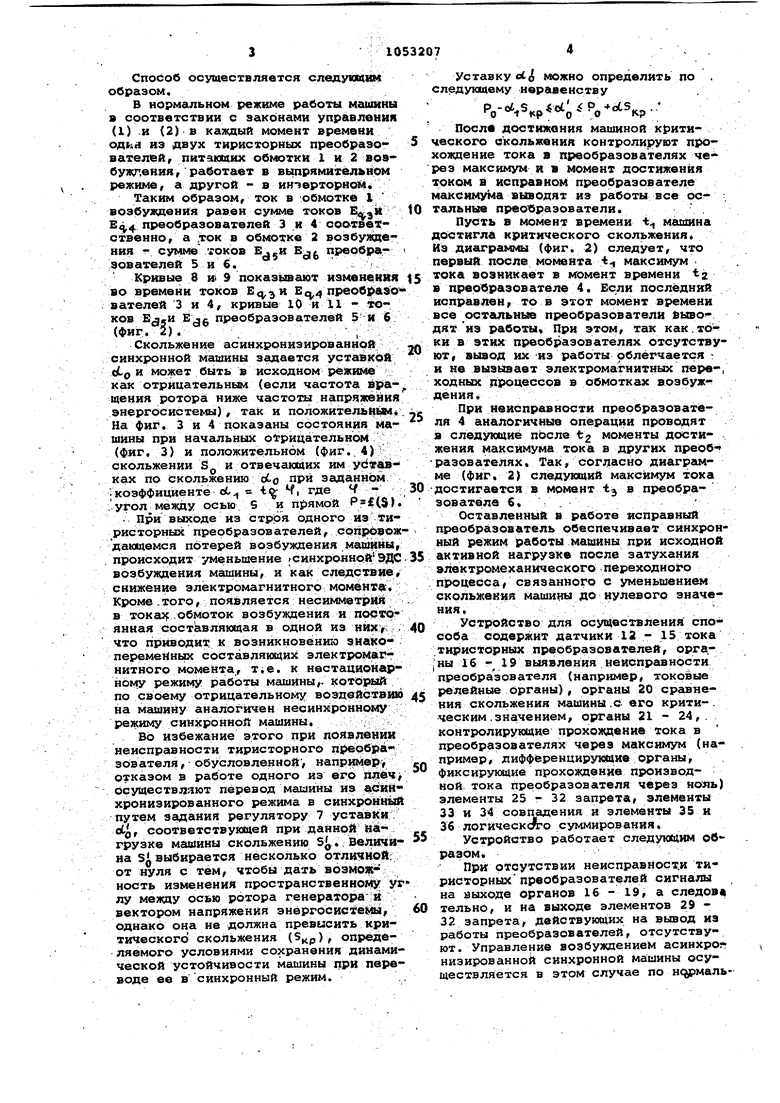
Кривые 8 № 9 показывают изменения во времени токов Б (,з q/4 преоб аэователей 3 и 4, кривые 10 и 11 токов К «и Ej/- преобразователей 5 н б (фиг-. 2). ;
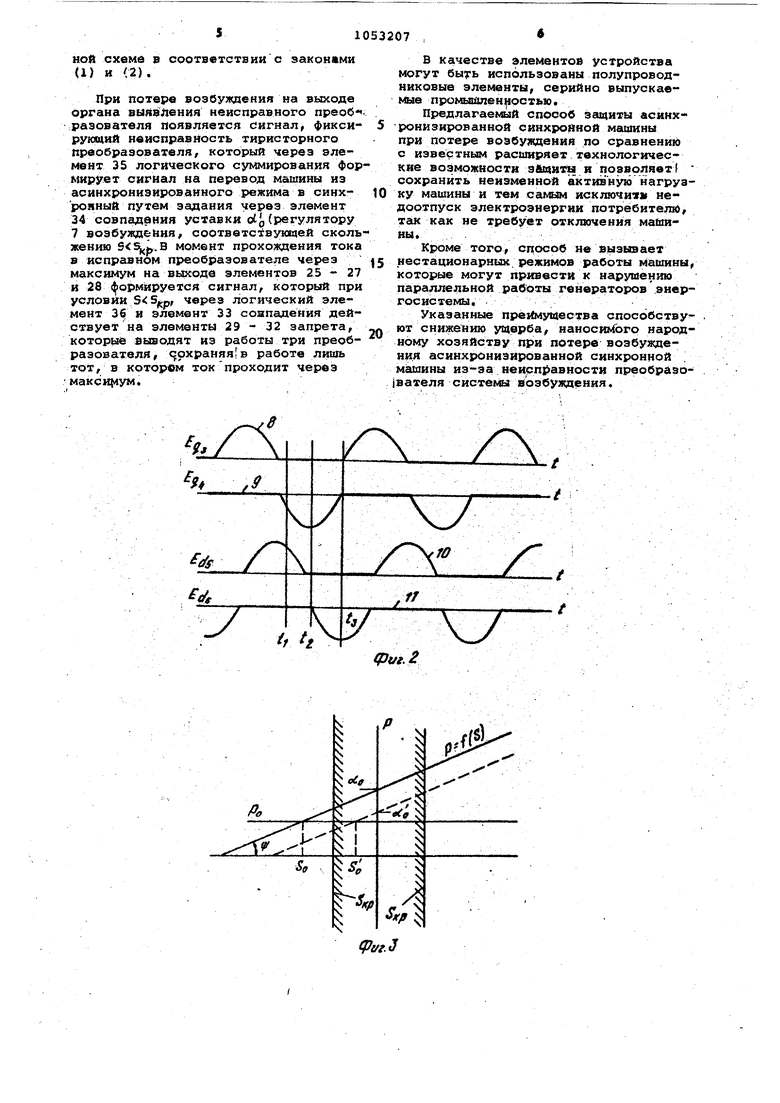
Скольжение асинхронизированной синхронной машины задается уставкой d-Q и может быть в исходном режиме как отрицательHEJM (если частота вра щения poTopai ниже частоты напряжения энергосистемы), так и положительным, На фиг. 3 и 4 показаны состояния машины при мачальны} отрицательном (фиг, 3} и положительном (фиг. 4) скольжении S и отвечакх4их им уЬфавках по Скольжению uCg при заданном Гкозффицйенте оС М, где Ч .угол между осью S и прямой Р($. . При выходе из строя одного из тиристорных преобразователей, сопровождающемся потерей возбуждения машины, происходит уменьшение ;синхроиной ЭДС возбуждения машины, и как следствие, снижение электромагнитного момент -, кроме . того, появляется несимметрйя в TOKai.обмоток возбуждения и постоянная составляющая в одной из HHX|s . что приводит, к возникновенню знахо перемеНньрс составляющих электромагнитного момента,, . к нестационар Ному режиму работы машины,, который по своему отрицательному воздействию на машиНу аналогич ен несинхронному режиму синхронной машины
Во избежание этого при появлении неисправности тиристорного преобразователя , ленной, например, отказом в работе одного Из его плеч, осуществляют перевод машины иэ асинхронизированного режима в синхронный путем задания регулятору 7 уставки ot-Q, соответствующей при данной нагрузке машины скольжению 5. Величина Si выбирается несколько отличной, от нуля с тем, чтобы дать возможность изменения пространственному углу между осью ротора генератора- и вектором напряжения энергосистемы, однако она не должна превысить критического скольжения (Sjtp), определяемого условиями сохранения динамической устойчивости машины при переводе ее в синхронный режим.
Уставку ci можно определить по . следующему неравенству
; Ч- 5крК л 5кр-После достижения машиной критического скольжения контролируют прохождение тока в преобразователях через максимум и в момент достижения током В исправном преобразователе максимума выводят из работы все остальные преоХ}разователи«
Пусть в момент времени t машина достигла критического скольжения. Из диаграммы (фиг. 2) следует, что первый после момента -( максимум тока возникает в момент времени 2 в преобразователе 4. Если последний исправлен, то в этот момент времени все остальные преобразователи ВывОдят из работы Прн этом, так как.то ки в этих преобразователях отсутствуют, вывод их из работы облегчается и не вызывает электромагнитных переходных процессов в обмотках возбуждения
При неисправности преобразователя 4 аналогичные операцни проводят в следующие после t моменты достижения максимума тока в других преобразоватеЛях. Так, согласно диагргшме (фиг. 2) следующий максимум тока достигается в момент t в преобразователе 6, .
Оставленный в ра:боте исправный преобразователь обеспечивает синхронный режим работы машнны при исходной активной нагрузке после затухания электромеханического переходнохо процесса, связанного с уменьшением скольжения машины ДО нулевого значения, / - -: : -...
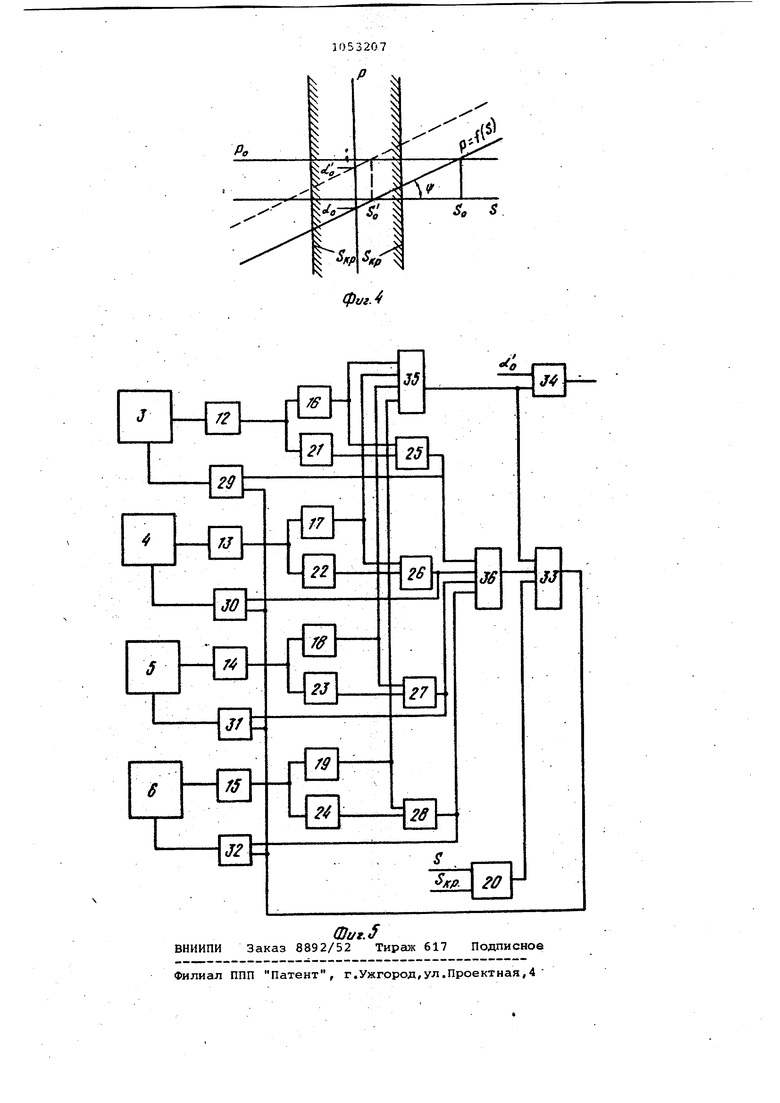
Устройство для осуществления способа содержит датчики 12 - 15 тока тиристорных преобразователей, орга.,ны 16 -, 19 выявленн 1 неиспргшности преобразователя (например, токовые релейные Органы), органы 20 сравнения скольжения машнны.о его крити-. ческим .значением, органы 21 - 24, контролирующее прохождение кока в преобразователях через максимум (например, лиффёренцируншие органы, фиксирующие прохождение производной тока преобразователя через ноль элементы 25 - 32 запрета, элементы 33 и 34 совпадения и элементы 35 и 36 логичёсксЛго суммирования.
Устройство работает следующим об разом.
При отсутствии неисправности тиристорных преобразователей сигналы на выходе органов 16-19, а следов тельно, и на выходе элементов 29 32 запрета, действующих на вывод из работы преобразователей, отсутствуют. Управление возбуждением асинхрогнизированной синхронной машины осуществляется в этом случае по нормалной схеме в соответствии с законами (1) и (2).
При потере возбуждения на выходе органа вы}1вЛения неисправного прео6«, разователя появляется сигнал фиксирующий неисправность тиристорного преобразователя, который через элемент 35 логического суммирования формирует сигнал на перевод машины из асинхронизированного режима в синхрояный путем задания через элемент 34 совпадения уставки с/д(регулятору 7 возбуждения, соответствующей скольжению .B момент прохождения тока в исправном преобразователе через максимум на вьрсодв элементов 25 - 27 и 28 формируется сигнал, который при условии .p, через логический элемент 3 и элемент 33 совпадения действует на элементы 29 - 32 запрета, которые аьшодят из работы три преобразователя, (охраняя в работе лишь тот, в котором ток проходит через макси 1ум.
ff
/
В качестве элементов устройства могут быть использованы полупроводниковые элементы, серийно выпускаемые промьп отен остью.
Предлагаемый способ защиты аскнхронизированной синхронной мгшшны при потере возбуждения по сравнении) с известным расширяет технологические возможности эйщиты и позврлявт сохранить неизменной 1акти5э ную нагрузку машины и тем самым исключив недоотпуск электроэнергии потребители, так как не требует отключения майины« ., .- . . - .
кроме того, способ не вызывает нестационарных режимов работы машины которые могут привести к нарушению параллельной работы генераторов энергосистемы.
Указанные пре}(мущества способствую ют снижению ущерба, наносик го народному хозяйству при потере возбуждения асинхронизйрованной синхронной ; машины из-эа неисправности преобр 13о|вателя системы Возбуждения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты асинхронизированной синхронной машины от несимметричной потери возбуждения | 1984 |
|
SU1220048A1 |
| Способ защиты синхронной машины от асинхронного режима | 1982 |
|
SU1073839A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1598043A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Устройство для электропитания потребителей | 1983 |
|
SU1095308A1 |
| Устройство для защиты синхронной машины от асинхронного режима | 1982 |
|
SU1101957A1 |
| Устройство для связи двух энергосистем | 1982 |
|
SU1046839A1 |
СПОСОБ ЗАЩИТЫ СИНХРОННОЙ МАШИНЫ ПРИ ПОТЕРЕ ВОЗБУЖДЕНИЯ, ОСНбваннцй на контроле токов возбуждения и фиксации наличия потери аозбужде ния, от л и ч а ю щ и и с я тем, что, с ц1элыо расширения фукнциональных возможностей защиты асинхронизированной синхронной машины путем перевода последней в синхронный режим, в качестве контролируемого токового параметра используют ток тиристорннх преобразователей, кроме того, дополнительно измеряют скольжение, сравни вают его с критическим значением, определяемым условиями сохранения динамической устойчивости машины при переводе ее в синхронный режим, и после достижения машиной критического скольжения контролируют прохождение тока в преобразователях через максимум и в момент достижения током в исправном прербразователе максимума выводят из работы все остальные преобразователи. После чего осущест вЛяьгг работу асинхронизнров&н ой синхронной машины в. синхронном режиме. ... J , . . сд оо to
А 1
фиг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рутковский Л.Б | |||
| Особенности асинхронных режимов невоэбуждеНного гидрогенератора при его нестационарном двияюНИИ.-Труды Гийропроекта, 60, М., 1977, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ защиты синхронной машины от асинхронного режима при потере возбуждения | 1977 |
|
SU700892A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , | |||
