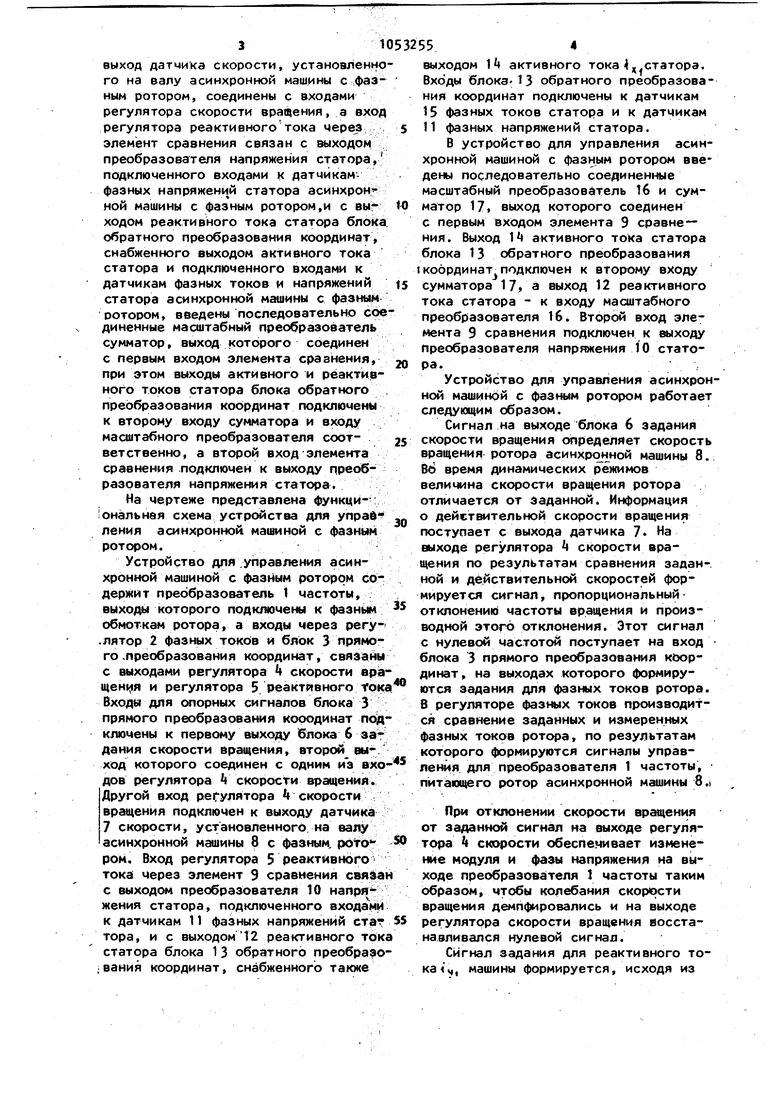
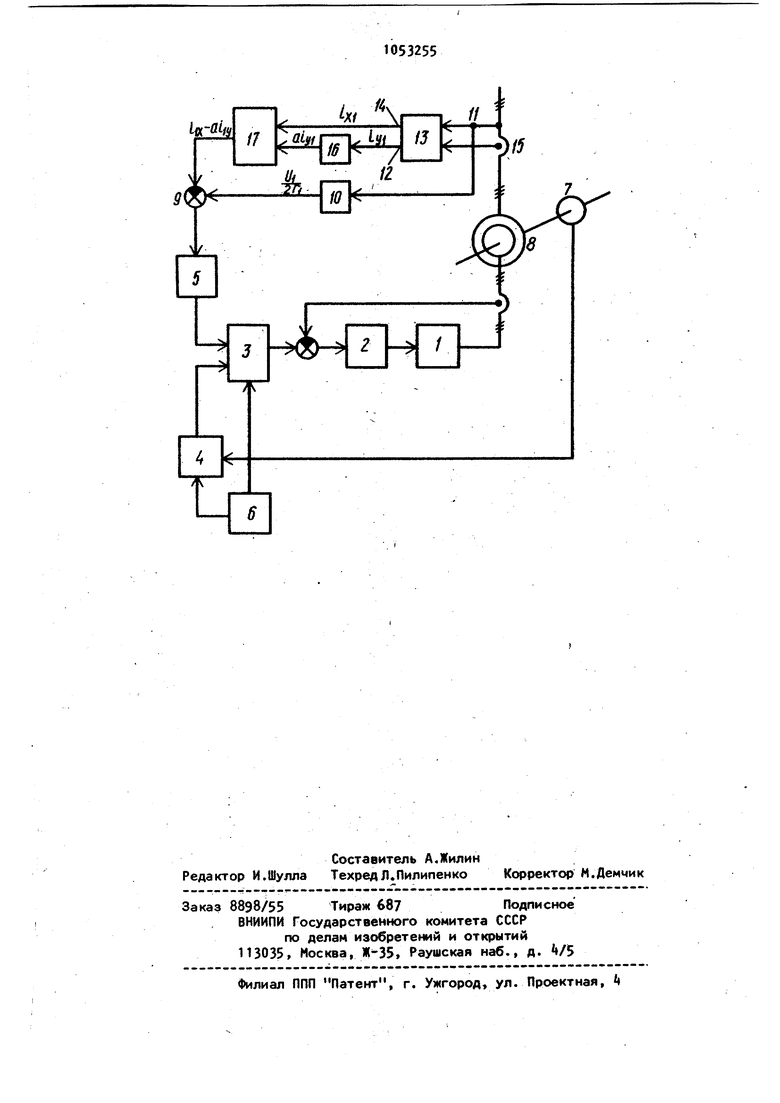
Изобретение относится к электротехнике, в частности к управляемым электроприводам с асинхронной машиной с фазным ротором, и может быть ирпользовамо для регулирования скорости нагрузки относительно синхронной скорости, определяемой частотой питающей сети. Известно устройство для управления асинхронной машиндй с фазным ротором, содержащее преобразователь частоты, выходы которого подключены к фазным обмоткам ротора,, а входы через блок прямого преобразования координат и регуляторы составляющих тока ротора связаны с выхоДами блока задания скорости вращения, датчика скорости и блока обратного преобразования координат, подключенного входами к датчикам фазных токов и напряжений статора асинхронной машины с фазным ротором. В устройстве производится регулирование составляющих тока статора lj . Однако в устройстве не обеспечива ется режим Минимальных потерь, след:СТвием чего явля(5тся невысокий КПД, Наиболее близким к изобретению по технической -сущности является устроиство для управления асинхронной машиной с фазным ротором, содержащее преобразователь,частоты, выходы кото рого подключены к фазным обмоткам ро тора, а .входы через регулятор фазных токов и блок прямого преобразования координат связаны с выходами регуля торов скорости вращения и реактивно го тока, вход для опорных сигналов блока прямого преобразования координат подключен к первому выходу блока задания скорости вращения, второй вы ход которого и выход датчика скорост установленного на валу асинхронной машины с фазным ротором, соединены с входами регулятора скорости вращения а вход регулятора реактивного тока через элемент сравнения связан с выходом преобразователя напряжения статора, подключенного входами к датчикам фазных напряжений статора асинхронной машины с фазным ротором, и с выходом реактивного тока статора блока обратного преобразования координат, снабженного выходом актив ного тока статора и подключенного входами к датчикам фазных токов и напряжений статора асинхронной машин с фазным ротором 2J . В известном устройстве рещается задача минимизации потерь в обмотках машины, исходя из вычисленного значения реактивного тока статора по выражению i.,., си гдеУ - напряжение статора; PJ - приведенное активйое сопротивление ротора; Хэ - индуктивное сопротивление статора с учетом взаимоиндукции .статора и ротора; fHfa ( активное сопротивление статора), Кс I (п индуктивное сопротивление взаимной индукции статора и ротора). Момент нагрузки при этом не учитывается. . . Выражение (1) получено из уравнений статора при допущении Г, О, что вполне удовлетворительно для машин большой мощности. Для машин малой и средней мощности до $0 кВт), где величина активного сопротивления ста тора сравнима с его реактивным сопротивлением, регулирование из условия поддержания заданного реактивного тока статора по закону (1) не соответствует .режиму минимизации потерь в меди машины. Поддержание реактивного тока статора позволяет реализоз вать режим минимальных потерь только при значениях момента, равных нулю, т.е. на холостом ходу 2 . Недостатком известного устройства является невысокий КПД, так как в нем не обеспечиваются минимальные потери на всех режимах работы. Цель изобретения. - повышение КПД устройства для управления асинхронной машиной с фазным ротором за счет минимизации потерь в меди машины. Указанная цель достигается тем, что в устройство для управления асинхронной машиной с фазным ротором, содержащее преобразователь частоты, выходы которого подключены к фазным обмоткам ротора, а входы через регулятор фазных токов и блок прямого преобразования координат связаны с выходами регуляторов скорости вращения и реактивного тока, вход для опорных сигналов блока прямого преобразования координат подключен к первому выходу блока задания скорости вращения, второй выход которого и выход датчика скорости, установленно го на валу асинхронной машины с фазным ротором, соединены с входами регулятора скорости вращения, а вход регулятора реактивноготока чере элемент сравнения связан с выходом преобразователя напряжения статора, подключенного входами к датмикамфазных напряжений статора асинхрон ной машины с фазным ротором,и с вы ходом реактивного тока статора блока обратного преобразования координат, снабженного выходом активного тока статора и подключенного входами к датчикам фазных токов и напряжений статора асинхронной машины с фазным ротором, введены последовательно сое диненные масштабный преобразователь сумматор, выход которого соединен с первым входом элемента ераанения, при этом выходы активного и реактивного токов статора блока обратного преобразования координат подключены к второму входу сумматора и входу масштабного преобразователя соответственно, а второй вход-элемента сравнения .подключен к выходу преобразователя напряжения статораt На чертеже представлена функцй- ональная схема устройства для управления асинхронной машиной с фазным ротором. Устройство для.управления асинхронной машиной с фазным ротором содержит преобразователь 1 частоты, выходы которого подключены к фазным обмоткам ротора, а входы через регу.лятор 2 фазных токбв и блок 3 прямого .преобразования координат, связаны с выходами регулятора k скорости вра и регулятора 5. реактивного foK Входы для сэторных сигналов блока 3 прямого преобразования кооодинат под ключены к первому выходу блока б зат Дания скорости вращения, второй выход которого соединен с одним из вхо дов регулятора k скорости вращения. Другой вход регулятора скорости вращения подключен к выходу датчика 7 скорости, установленного, на валу асинхронной машины 8 с фазным., poto ром. Вход регулятора 5 реактивного тока через элемент 9 сравнения связа с выходом преобразователя 10 напряжения статора, подключенного входами к датчикам 11 фазных напряжений ста тора, и с выходом12 реактивного ток статора блока 13 обратного преобразо вания координат, снабженного также выходом активного тока 4 статора. Входы блока 13 обратного преобразования координат подключены к датчикам 15 фазных токов статора и к датчикам 11 фазных напряжений статора. В устройство для управления асинхронной машиной с фазным ротором введены последовательно соединенные масштабный преобразователь 16 и сумматор 17, выход которого соединен с первым входом элемента 9 сравне- ния. Выход 1 активного тока статора блока 13 обратного преобразования координат подключен к второму входу сумматора 17 а выход 12 реактивного тока статора - к входу масштабного преобразователя 16. Второй вход элемента 9 сравнения подключен к выходу преобразователя напряжения 10 статора., Устройство для управления асинхронной машиной с фазным ротором работает следующим образом. Сигнал на выходе блока 6 задания скорости вращения определяет скорость вращения ротора асинхронной машины 8. В6 время динамических режимов вели1(на скорости вращения ротора отличается от заданной. Информация о действительной скорости вращения поступает с выхода датчика 7. На выходе регулятора k скорости вращения по результатам сравнения заданной и действительной скоростей формируется сигнал, пропорциональныйотклонению частоты вращения и производной этого отклонения. Этот сигнал с нулевой частотой поступает на вход блока 3 прямого преобразования координат , на выходах которого формируются задания для фазных токов ротора. В регуляторе фазных токов производится сравнение заданных и измеренных фазных токов ротора, по результатам которого формируются сигналы управления для преобразователя 1 частоты, питающего ротор асинхронной машины 8.i При отклонении скорости вращения от заданной сигнал на выходе регулятора t скорости обеспечивает изменение модуля и фазы напряжения на выходе преобразователя 1 частоты таким образом, чтобы колебания скорости вращения демпфировались и на выходе регулятора скорости вращения восстанавливался нулевой сигнал. Сигнал задания для реактивного тока Vvi, машины формируется, исходя из анализа уравнений статора с учетом активного сопротивления i, . Условия минимальных потерь в меди машины выполняется при следующих значениях активного Х4 и реактивно го 4,, токов статора It Хгп4Г,г(Хб-1Г) 4г х J i- tai4-r1)l n F;-J M - момент на валу машины; Хщ- коэффициент пропорц-ональности. Из (2) получаем условие: - где коэффициент а, зависящий оТ тип машины, определяется () (з Условие (3), реализованное в уст ройстве, является условием минималь ных потерь в меди машины для всего Диапазона моментов нагрузки (без учета насыщения машины),. Выходной сигнал активного тока jстатора с выхода k блока ,13 обратного преобразования координат поступает на первый вхо сумматора 17, на второй вход которого поступает сигнал с выхода масштабного преобразователя 16. На выходе сумматора-17 формируется сигнал обратной связи |Ъх Ц. поступающий на первый вход элемента 9 сравнения. С выхода преобразователя 10 напряжения статоipa на второй вход элемента сравнения поступает cигнaлV, , играющий роль сигнала задания. При изменении нагрузки-на валу скорости вращения и других динамических переходах сигнал задания с преобразователя 10 напряжения статора отличается от сигнала обратной связи с выхода сумматора 17. Разность указанных сигналов с выхода элемента 9 сравнения поступает на вход регулятора реактивного тока 5 (например, пропорционально-интегрального) . Выходной сигнал регулятора 5 реактивного тока поступает на другой из входов блока 3 прямого преобразования координат, и обеспечивает такое изменение модуля и фазы подводимого к ротору напряжения, чтобы выполнялось условие (3), которое является условием минимальных потерь . в асинхронной машине с фазным ротором. Таким образом, введение в устройство для управления асинхронной машиной с фазным ротором обратной связи по разности активного и реакивного токов статора, взятых с опрееленными коэффициентами и выполненных с помощью масштабного преобраователя и сумматора, позволяет обесечить режим минимальных потерь в еди машины, которые снижаются на -10, благодаря чему повышается ПД устройства.
i.,
rr
t«-fl%
W
17
Qiyf
Ji
(
(
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронной машиной с фазным ротором | 1982 |
|
SU1032581A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод с асинхронной машиной с фазным ротором | 1977 |
|
SU1100703A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННОЙ МАШИНОЙ С ФАЗНЫМ РОТОРОМ, содержащее преобразователь частоты, выходы которого подключены к фазным обмоткам ротора, а входы через регулятор фазных токов и блок прямого преобразоанмя координат связаны с выходами регуляторов скорости вращег ния и реактивного тока, вход для опорных сигналов блока прямого преобразования координат пгдключен к перёому выходу блока задания скорости вращения, второй выход которогои выход датчика скорости, установленного на валу асинхронной машины с фазным ротором , соединены с входами регулятора, скорости ращения. а вход регулятора реактивного тока через элемент сравнения связан с выходом преобразователя напряжения статора, подключенного входами к датчикам фазным напряжений статора асинхронной машины с фазным ротором, и с выходом реактивного тока статора блока обратного прербразования координат, снабженного выходом ак-тивного тока статора и подключенного входами к датчикам фазных токов и напряжений статора асинхронной машины с фазным ротором,о т л и ч аю щ е е с я тем, что,с целью повышения КПД,в него введены последовательно соединенные масштабный преоб§ разователь и сумматор, выход кото(Л рого соединен с первым входом элемента сравнения, при этом выходы активного.и реактивного токов статора блока обратного преобразовагния координат подключены к второму входУ сумматора и входу масштабного преобразователя соответственно, а второй вход элемента сравнения под ключен к выходу преобразователя напряжения статора.