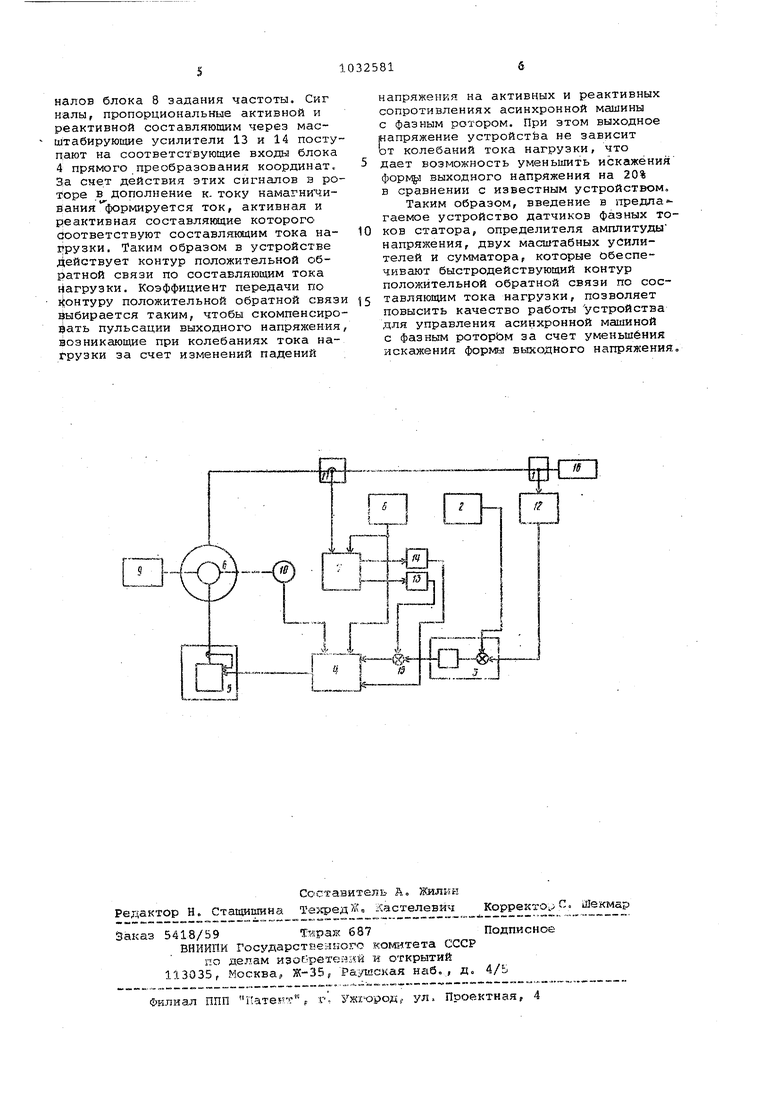
Изобретение относится к электро-технике, точнее к устройствам для управления асинхронной машиной с фазным ротором, и может быть примене но при проектировании элёктромашинных генераторов с переменной скоростью врашения вала приводного двигателя ;при повьшенных требованиях к стабиль ности амплитуды, частоты и формы выходного напряжения. Известно устройство управления асинхронной машиной с фазным ротором :содержащее регулятор фазных токов :ротора, связанный через блок прямого :преобразования координат с регулятором напряжения, к выходам которого подсоединены выходы блока задания :активной и реактивной составляющих напряжения и выходы блока обратного преобразования напряжения статора I ° Недостатком данного устройства управления является наличие больших искажений формы выходного напряжения при колебаниях тока нагрузки, объясняемое тем, что регулятор напря- жения не реагирует непосредственно на колебания тока нагрузки. Наиболее близким к предлагаемому по технической сущности является уст ройство для управления асинхронной м шиной с фазным ротором, содержащее датчики фазных напряжений статора, блок задания напряжения, выходы которых через регулятор напряжения, блок )го преобразования координат с входами задания активной и реактивней составляющих тока и регуляторы фазных токов связаны с фазными цепями ротора асинхронной машины блок обратного преобразования координат с выходами активной и реактивной составляюгцих тока, связанный входами с фазными цепями статора асинхронной машины, и блок задания частоты, выходы которого подключены к входам для опорных сигналов блоков прямого и обратного преобразования координат, при этом ротор асинхронной машины механически связан с валом приводного двигателя и датчиком углового положения, вбаходы которого соединены с дополнительными входами для опорных сигналов блока прямого преобразования координат С2. Недостатком известного устройства управления является наличие боль ших искажений формы напряжения.при колебаниях тока нагрузки. Это . объясняется тем, что регулятор напр жения не реагирует непосредственно на колебания тока нагрузки и не ком пенсирует колебания напряжения на активных и индуктивных сопротивлени статора, приводящих к искгикёнию фор ikftj выходного напряжения, что понижает точность работы электропривода Цель изобретения - повышение точ ности за счет уменьшения искажений выходного синусоидального напря ения путем введения в контур регулирования напряжения 11Ьложительных обратных связей по активной и реактивной составляющим тока нагрузки. Поставленная цель достигается тем, что в устройство для управления асинхронной машиной с фазным ротором, содержащее датчики фазных напряжений статора, блок задания напряжения, высоды которых через регулятор напряжения, блок прямого преобразования. . координат с входами задания активной и реактивной составляющих тока и регуляторы фазных токов связаны с фазными цепями ротора асинхронной маишны, блок обратного преобразования координат с выходами активной и реактивной составляющих тока, связанный входами с фазнымидепями статора асинхронной машины, и блок задания частоты, выходы которого подключены к входам- для опорных сигналов блоков прямого и обратного преобразований координат, при этом ротор асинхронной машины механическисвязан с валом, приводного двигателя и датчиком УГЛОВОГО положения, выходы которого соединены с дополнительными входами для опорных сигналов блока прямого преобразований координат, введены датчики фазных токов статора, определитель а1.;г1литуды напряжения., двг масштабных усилителя и сумглатор, выход которого подключен к входу задания реактивной составляющей тока блока прямого преобразования координат , первый Bxoia - к выходу регулятора напряжения, а второй вход через первый масштабный усилитель-к выходу реактивной составля;о Дёй тОка блока- обратного преобразования координат, входы которого подключены к выходам датчиков фазных токов статора, а выход активной составляющей тока через второй масштабйый усилитель-- к входу задания активной составляющей тока блока прямого преобразования координат, при этом входы определителя амплитуды напряжения подключены к выходам датчиков фазных напряжений статора, выход к одному из входов регулятора напряжения, а блок задания напряжения вы-. полнен в виде блока задания амплитуды напряжения. На- чертеже представлена функцио,нальная блок-схема устройства для управления асинхронной машиной с фазньш ротором. Устройство содержит датчики 1 фазных напряженки статора v. блок 2 задания напряжения, Еыходь ; которых через регулятор 3 напряжения, блок 4 прямого преобразования координат с входами задания активной и реактивной составляюипх тока и регуляторы 5 фа13НЬ1х токов связаны с фазными цепями ротора асинхронной MBJIIHны б. Блок 7 обратного преобразования координат с выxoдa /tи активной и реактивной составлягацих тока связан входами с фазными цепями статора асинхронной машины 6. Выходы блока 8 задания частоты подключены к входам для опорных сигналов блоко 4 и 7 прямого и обратного преобразо вания координат. Ротор асинхронной машины б механически связан с валом ггриводного двигателя 9 и датчиком Д углового положения,выходы которого со динены с дополнительными входами для опорных сигналов блока 4 прямого преобразования координат. Q . Кроме того, устройство срдержит датчики 11 фазных токов статора, определитель 12 амплитуды напряжения масштабные усилители 13 и 14 и сумматор 15. Выход сумматора 15 подключен it входу задания реактивной составляющей тока блока 4 прямого преобразования координат. Первый входсумматора 15 подключен к выходу регу лйтора 3 напряжения, а второй вход через первый масштабный усилитель 1 к выходу реактивной-составляющей ток блока 7 обратного преобразования координат. Входы блока 7 обратного преобразования координат подключены к выходам датчиков 11 фазных токов статора,, а выход активной составлякшей тока через второй масштабный усилитель 14 подключен к входу задания активной составляющей блока 4 прямого преобразования координат. Входы определителя 12 амплитуды напряжения подключены к выходам датчиков 1 фазных напряжений статора, а выход к одногу1у из входов регулятора 3 напряжениях„Блок 2 задания напряжения выполнен, в виде блока .задания амплитуды напряжения. Устройство работает следующим образом. Приводной двигатель 9 вращает ротор асинхронной машины 6, в фазных обмотках которой с помощью ре-гулятора 5 фазных токов создается многофазная система токов. При этом в машине образуется вращающееся маг нитное поле, которое наводит в непод вижных обмотках статора многофазную сис7сему синусоидальных напряжений,, являющихся выходными напряжениями. Частота этих напряжений- определяется алгебраической суммой круговойчастоты вращения ротора и круговой частоты токов ротора. Амплитуда этих напряжений определяется амплитудой токов ротора, которые при работе машины б в режиме холостого хода (т.ге при равенс гве нулю тока нагрузки, определяемого сетью 16 ) являются токами намагничивания, создающими магнитный гготок машин 6. Таким образом в устройстве обеспечена возможность регулирования частоты и амплитуды выходного напряжения за счет регулирования частоты и амплитуды токов ротора. Стабилизация частоты и амплитуды в устройстве осуществляется следующим образом { рассмотрим режим холостого хода, т.е. равенства нулю тока нагрузки). Частота выходного напряжения поддерживается постоянной за счет того, что поддерживается неизменной алгебраическая сумма круговой частоты вращения ротора и круговой частоты токов ротора. При этом данная алгебраическая сумма поддерживается равной круговой частоте выходных синусоидальных напряжений, формируетиых в блоке 8 задания частоты. Это достигается за счет координатного преобразования сигналов блока 8 задания частоты и датчика 10 углового положения ротора в блоке 4 прямого преобразования . динат. В результате координатного преобразования круговая частота выходов блока 4 прямого пЕ еобразования координат в любой момент времени будет равняться алгебраической разности круговой частоты сигналов блока 8 задания частоты и круговой частоты вращения ротора асинхронной машины 6. Так как круговая частота токов ротора определяется выходными сигналами блока 4, то она также будет равна этой алгебраической разности. Таким образом, при изменении скорости вращения приводного двигателя 9 частота выходных напряжений будет стабильной и равной частоте сигналов блока 8 задания частоты. Амплитуда выходного напряжения стабилизируется за счет работы контура отрицательной обратной связи по амплитуде выходного напряжения. Реальная амплитуда выходного напряжения измеряется определителем 12 амплитуды напряжения (в качестве которого может использоваться многофазный выпрямитель и сравнивается в регуляторе 3 напряжения с сигналом уставки, вырабатываемом в блоке 2 задания напряжения. Сигнал рассогласования с выхода регулятора 3 напряжения поступает на вход реактивной составляющей тока блока 4 прямого преобразования координат, на выходах которого формируются сигналы с.амплитудой, соответствующей необходимой, для хтаддержания заданного уровня выходного напряжения, величине тока намагничивания. Регулятор 3 напряжения выполнен пропорционально-интегральным. Рассмотрим работу устройства с током нагрузки, отличным от нуля. В этом случае в блоке 7 обратного преобразования координат определяется активная и реактивная составляющие, этого тока путем координатного пре-образования выходных йигналов датчиков 11 фазных токов статора и сигналов блока 8 задания частоты. Сиг налы, пропорциональные активной и реактивной составляющим через масштабирующие усилители 13 и 14 поступают на соответствующие входы блока 4 прямого преобразования координат. За смет действия этих сигналов а роторе в дополнение к. току намагниЧив;ания формируется ток, активная и реактивная составляницие которого сзоответствуют составляющим тока наз: рузки. Таким образом в устройстве действует контур положительной обратной связи по составляющим тока нагрузки. Коэффициент передачи по контуру положительной обратной связи выбирается таким, чтобы скомпенсировать пульсации выходного напряжения, возникающие при колебаниях тока нагрузки за счет изменений падений
напряжения на активных и реактивных сопротивлениях асинхронной машины с фазным ротором. При этом выходное напряжение устройства не зависит от колебаний тока нагрузки, что
дает возможность уменьшить искажения форм выходного напрйжения на 20% в сравнении с известным устройством, Таким образом, введение в предла гаемое устройство датчиков фазных токов статора, определителя амплитуды напряжения, двух масштабных усилителей и сумматора, которые обеспечивают быстродействующий контур положительной обратной связи по составляющим тока нагрузки, позволяет повысить качество работы устройства для управления асинхронной машиной с фазным роторЬм за счет уменьшения искажения форми выходного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1982 |
|
SU1053255A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННОЙ МАШИНОЙ С ФАЗНЫМ РОТОРОМ, содержащее датчики фазных напряжений статора, блок задани; напряжения, выходы которых через регулятор напряжения, блок прямого преобразования координат с входакм задания активной и реактивной составлякяцих тока и рагуляторы фазных токов связаны с фазными цепякш ротора асинхронной машины, блок обратногчэ преобразования координат с выходами активной и реактивной составляющих тока, связанный входами с фазными цепями статора асинхронной машины, и блок задания частоты, выходы которого подключены к входам дпя опорных сигналов блоков прямого и обратного преобразований координат. при этом ротор асинхронной машины механически связан с валом приводного двигателя и датчиком углового положения, выходы которого соединены с дополнительными входами для опорных сигналов блока прямого преобразования координат, отличающееся тем, что, с целью повышения точности, введены датчики фазных токов статора, определитель амплитуды напряжения, два масштабных усилителя и сумматор, выход которого подключен к входу задания реактивной составляющей тока блока Прямого преобразования коор,цинат,первый вход - к выходу регулятора напря§ жения, а второй вход Через первый масштабный усилитель - к выходу реактивнойхйЬставляквдей тока блока обратного преобразования координат, входы которого подключены к выходам датчиков фазных токов статора, а выход активной составляющей тока через второй масштабный усилитель - к входу задания активной составляющей тока блока прямого преобразования координат, при этом входы определителя W Ю СЛ г1мплитуды напряжения подключены к выходам датчиков фазных напряжений статора, выход - к одному из входов регулятора напряжения, а блок .задания напряжения выполнен в виде блока задания амплитуды нешряжения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления асинхронной машиной с фазным ротором | 1973 |
|
SU517128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радин В.И., Загорский А.Е., Шакарян Ю.Г | |||
| Управляемле электрические генераторы при переменной частоте | |||
| Но ,J3HeprHH, 1978, С | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
