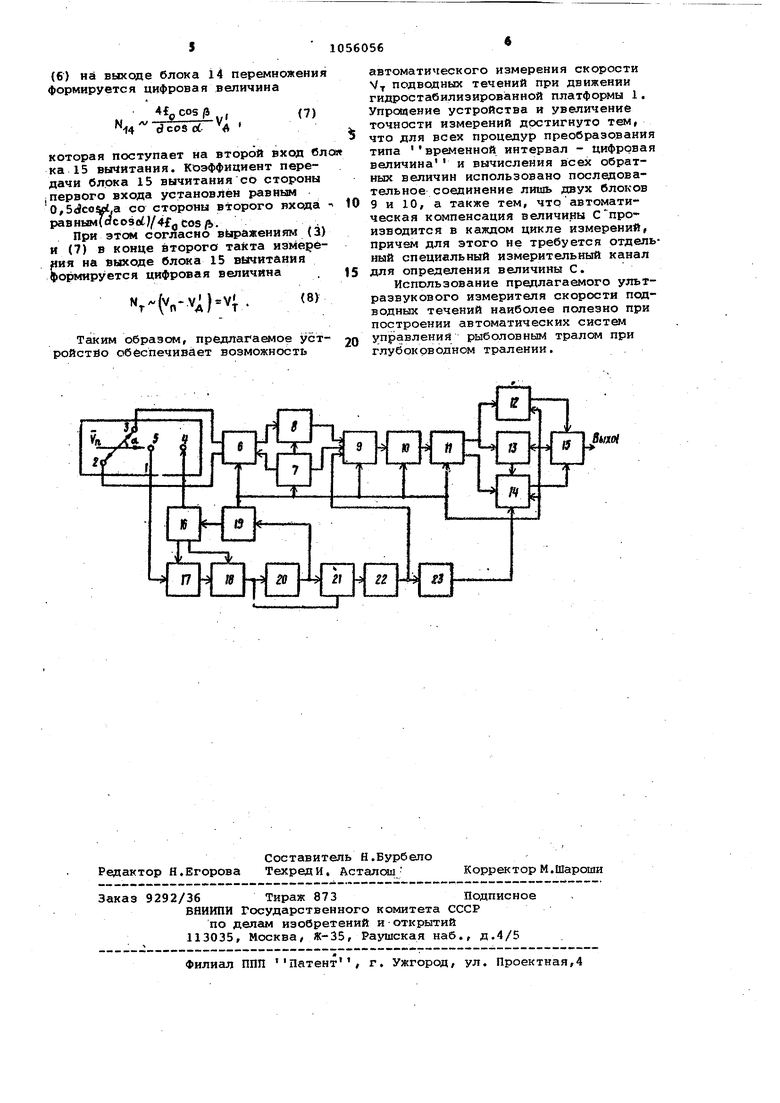
Изобретение относится к акустическим измерениям и может быть использовано для измерения скорости подводных течений и при пострюении систем управления глубоководными тралами. Известен доплеровский измеритель скорости движения объекта относител но отражающей поверхности,содержащий передающую и приемную акустические антенны,передатчик и приемник когерентных акустических импулвсов и бло измерения доплеровской частоты 1J, Недостатком этого устройства явл ется отсутствие возможности измерени скорости подводных течений при движении подводнего объекта, на котором установлен доНлеровский измеритель. Наиболее близким по технической сущности к предлагаемому является ультразвуковой измеритель скорости подводных течений, содержащий закреп ленные на гидростабилизированной платформе под углом к направлению потока два обратных электроакустических преобразователя, антенный кем , импульсные передатчик и при емник, преобразователь, блок деления блок вычитания, счетчик импульсов и синхронизатор С2 J. Однако известное устройство не позволяет измерять с высокой точностью скорость подводных течений при трансдортировании в них подводных объектов, поскольку измеряется только скорость транспортирования подводного объекта относительно потока воды и не учитывается скорость его движения относительно дна и скорость подводных течений при движении в них подводного объеКТа. Целью изобретения является повыше ние точности измерения скорости подводного течения при движении гидростабилизированной платформы, упрощение и автоматизация устройства. Поставленная цель достигается той что в ультразвуковой измеритель скорости подводных течений, содержащий установленные на гидростабилизиройан ной платформе под углом к направлению потока два обратимых электроакус тических преобразователя, подключенных через антенный коммутатор к первьм импульс.ньм передатчику и приемнику, выходы которых через преобразо ватель подключены к блоку деления, а также первый блок вычитания, синхронизатор и счетчик импульсов, введенц излучанадая и приемная антенны, вторые импульсные передатчик и приемник, первый и второй ключ, пороговое устройство, нуль-орган, коммутатор, сумматор, блок умножения и второй блок вычитания, причин передаюдая ан тенна подключена к первому выходу второго импульсного передатчика, второй выход которого подключен к второму импульсному приемнику, первый вход которого через первый ключ подключен к приемной антенне, а выход через второй ключ, нуль-орган и счетчик импульсов подключен к третьему входу блока перемножения, а через пороговое устройство - к управляющему входу второго ключа и входу синхронизатора, выход блока деления подключен к входу коммутатОЕ а, первый выход которого параллельно подключен к входам второго блока вычитания и сумматора, а второй - к первому входу блока перемножения, второй вход которого подключен к выходу сумматора, а выход - ко второму входу первого блока вычитания, первый вход которого подключен к выхОду второго блока вычитания, при этом управлякхций вход первого ключа соединен с вторым выходом второго импульсного передатчика, выход нуль-органа соединен с третьим входом преобразователя, а выходы синхронизатора подключены к управляющим входам антенного коммутатора, преобразователя, блока деления, коммутатора, первого и второго блоков вычитания, сумматора, блока перемножения и первого и второго импульсных передатчиков. На чертеже изображена структурная схема ультразвукового измерителя скорости подводных течений. Ультразвуковой измеритель скорости подводных течений содержит ридростабилизированную платформу 1, два обратимыхэлектроакустических преобразователя 2 и 3, передающую 4 и приемную 5 акустические антенны, антенный коммутатор 6, первый импульсный передатчик 7, первый импульсный приемник 8, преобразователь 9, блок 10 деления, коммутатор 11, второй блок 12 вычитания, сумматор 13, блок 14 перемножения, первый блок 15.вычитания, второй импульсный передатчик 16, первый ключ 17, второй импульсный приемник 18, синхронизатор 19, пороговое устройство 20, второй ключ 21, нуль-орган 22 и счетчик 23 импульсов. Ультразвуковой измеритель скорости подводных течений работает следуквдим образом. При транспортировке гидростабилизированной в горизонтальном положении платформы 1 скорость Vn надвигающегося потока определяется векторной суммой проекции V-,- вектора скорости подводного течения на продольную ось платформы 1 и проекции /д вектора скорости Vvji движения платформы 1 относительно морского дна на ту же ось платформы 1, T.e.Vp,V + vJ . В первом такте каждого цикла измерений надвиганвдийся поток воды зондируют акустическими импульсами, излучаемыми последовательно во рремени обратимыми электроакустическими преобразователями 2 и 3 по на правлению и против направления пото ка. Зондирующие импульсы поступают с первого выхода импульсного пере датчика 7 через антенный коммутатор 6 и принимаются импульсным приемником 8. Управление работой передатчи ка 7 и антенного коммутатора 6 осуществляется автоматически синхронизатором 19. При этом время .t прохож дения акустического импульса по направлению потока определяется выражениемdecs ci где и - базовое расстояние между элетроакустическими преобра зователями 2 и 3; d - угол между линией базы и пр .дольной осью платформы 1; С - скорость ультразвука в пото ке. ВремяЧ прохождения акустического импульса против направл.ения потока определяется выражением C-V, Импульсы.со второго выхода передатчика 7 и выхода приемника 8 поступают на первый и второй входы преобразователя, где величины и Tg преобразуются в пропорциональны этим величинам цифровые величины N и,-М5. В блоке 10 деления величины .иМ последовательно во времени преоб разуются в обратные цифровые величи ны 1/N и . Эти величины через коммутатор 11 поступают на входы второго блока 12iвычитания и сумматора 13. Разностная цифровая величина ТГд Ng J acosi. .с выхода блока 12 вычитания записы|вается в регистры первого входа пер вого блока 15 вычитания, а суммарна цифровая величина с выхода блока 13 суммирования (4:) dcosd записывается в регистры второго вхо да блока 14 перемножения. Этим кончается пер.вый такт измерений. Во втором такте коммутатор. 11 им пульсом синхронизатора 19 переводит ся в состояние, при котором выход блока 10 деления соединен с первым входом блока 14 перемножения. Одновременно импулЬсом синхронизатора 19 запускается передатчик 16 когерентных акустических импульсов с несущей частотой JF и с помощью передающей акустической антенны 4 этот импульс излучается в направлении дна. При этом на время излуыения зондирующего импульса с помощью ключа 17 вход приемника 18 когерентных акустических импульсов отключается от выхода приемной акустической антенны 5. Отраженный от дна акустический импульс принимается приемной акустической антенной 5 и поступает на вход приемника 18. Одновременно на вход опорного сигнала пpиeмниka 18 поступает когерентное гармоническое колебание с частотой.f, которое смешивается с принятым сигналом. Таким образом, во время.приема отраженного акустического импульса на выходе приемника 18 формируется радиоимпульс с частотой заполнения, равной частоте fj. доплеровского сдвига: 2.,cosfl . л -V ; где /i - угол наклона диаграммы на- правленности передающей акустической антенны 4. При превымении амплитуды выходного импульса приемника 18 заданного порога обнаружения в пороговом устройстве 20 ключ 21 переводится в замкнутое состояние на время отраженного акустического импульса, в результате чего выходной импульс приемника 18 поступает на вход нуль-органа 22. Выходные импульсы нуль-органа 22, .соответствующие моментам перехода напряжения сигнала с частотой заполнения д через нули при положительной величине;.Первой производной этого напряжения, поступают на третий вход преобразователя 9 и на вход счетчика 23 импульсов. При этом на выходе преобразователя 9 после окончания принятого импульса Формируется цифровая величина , где количество периодов напряжения сигнала заполнения, поступивших на вход нульоргана 22 в течение приема отраженного акустического импульса. Цифровая величина ЫдВ блоке 10 деления преобразуется в обратную цифровую величину которая через коммутатор 11 поступает на первый вход блока 14 перемножения, бдновременно на третий РХО.Д блока 14 перемножения поступает выходная цифровая величина .j с выхода счетчика 23 импу.ньсов. При этом согласно выражениям (4),(5) и (6) на выходе блока 14 перемножения формируется цифровая величина 4fpC05p , N-14 dcosd А которая поступает на второй вход бл ка 15 вычитания. Коэффициент передачи блока 15 вычитания со стороны (Первого входа установлен равным 0,5«Jco&)t.a со сторона второго входа равнымТасо5об;/4 д tos /ь.. При этс согласно вЬфажениям (3) и (7) в конце второго такта измерения на выходе блока 15 вычитания формируется цифровая величина N,(V«-.V;)V . Таким образом, предлагаемое уст ройстйо обеспечивает возможность автоматического измерения скорости VT подводных течений при движении гидростабилизированной платформы 1. Упрощение устройства и увеличение точности измерений достигнуто тем, что для всех процедур преобразования типа временной интервал - цифровая величина и вычисления всех обратных величин использовано последовательное соединение лишь двух блоков 9 и 10, а также тем, что автоматическая компенсация величины Спроизводите я в каждом цикле измерений, причем для этого не требуется отдельный специальный измерительный канал для определения величины С. Использование предлагаемого ультразвукового измерителя скорости подводных течений наиболее полезно при построении автоматических систем управления рыболовным тралсял при глубоководном тралении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель пульсирующих скоростей потока | 1983 |
|
SU1081544A1 |
| Ультразвуковой измеритель пульсирующих скоростей потока | 1988 |
|
SU1644039A2 |
| Метеорологическая радиолокационная станция | 1982 |
|
SU1058444A1 |
| Ультразвуковой измеритель трех компонент вектора скорости потока | 1983 |
|
SU1153295A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ СУДОВ В АКВАТОРИИ ПОГРАНИЧНОЙ ЗОНЫ | 2019 |
|
RU2714614C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1991 |
|
RU2043659C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2101728C1 |
УЛЬТРАЗВУКОВОЙ Р13МЕРИТЕЛЬ СКОРОСТИ ПОДВОДНЫХ ТЕЧЕНИЙ, содержащий установленные на гидростабилизированной платформе под углом к наЪравлениюпотока два обратимых электроакустических преобразователя,подключенных через антенный коммутатор к первым импульсным передатчику и при,тнику,выхода1 которых через преобразователь подключены к блоку- деления, а также первый блок вычитания, синхронизатор и счетчик импульсов, о т личающийс я тем, что, с целью увеличения точности измерений при движении гидростабилизированной платформы, в него введены излучающая и приемная антенны,, вторые импульсные передатчики приемник, первый и второй ключ, пороговое устрой-, ство, нуль-орган, коммутатор, сумматор, блок умножения и второй блок , вычитания, причем передагадая антенI на подключена к первому выходу второго импульсного передатчика, .второй выход которого подключен к второму импульсному приемнику, первый вход которого через первый ключ подключен к приемной антенне, а выход через второй ключ, нуль-орган и счет-, чик импульсов подключен к третьему входу блока перемножения, а через пороговое устройство - к управляющему входу второго ключа и входу синхронизатора, выход блока делен.чя подключен К-входу коммутатора, первый выход которого параллельно подключен к входам второго блока вычитания и сумматора, а второй - к первому входу блока перемножения, второй (Л вход которого подключен к вьмоду сумматора, а выход - .к второму вхо-, ду первого блока вычитания, первый вход которого подключен к выходу второго блока вычитания, при зтом уп- 2 .равляющий вход первого ключа соединен с вторым выходом импульс.Вого передатчика, выход нуль-органа соединен с третьим входом преобразователя, а выходы синхронизатора подел ключены к управляквдим входам антено ного коммутатора, преобразователя, блока деления, коммутатора, суммататора, блока перемножения, первого и второго блоков вычитания и первого wi и второго импульсных передатчиков. flj
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА РЖАНОГО ИЛИ РЖАНО-ПШЕНИЧНОГО ХЛЕБА | 1993 |
|
RU2034473C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА В ГОРИЗОНТАЛЬНОМ СТВОЛЕ СКВАЖИНЫ | 2014 |
|
RU2547892C1 |
