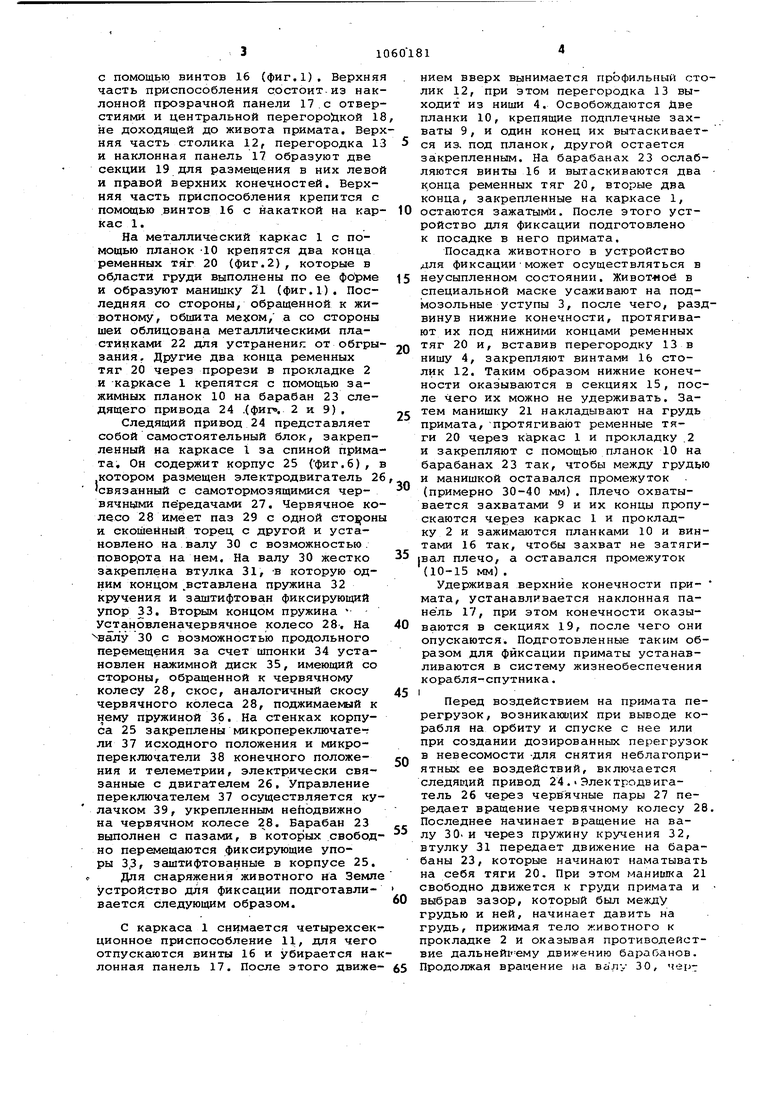
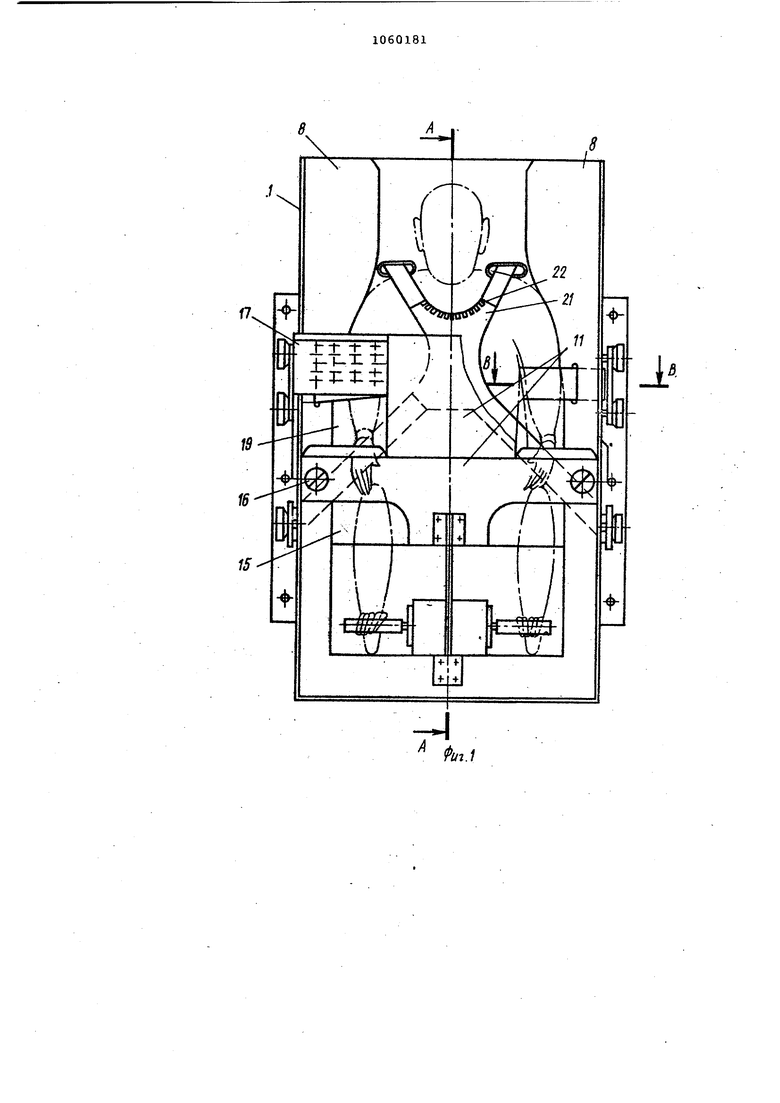
изобретение относится к медици15е и касается длительных биологических и физиологических исследований над приматами в условиях невесомости. Известно устройство для фиксации примата при .проведении исследований содержащее креслообразный металличе ский каркас с профилированной по по верхности тела примата амортизирующей прокладйой и средство крепления примата l . Так как костюм не очень плотно прижат к телу животного, то при появлении перегрузок, при выводе на орбиту и спуске с нее могут возник.нуть внутренние .повреждения органов Крюме того, после вывода на орбиту примат должен выполнять заданную пр грамму операторской деятельности и нижними конечностями, поэтому они должны и определенных прэделах имет свободу перемещений, что не обеспечивается известной системой фиксации. Система фиксации предусматрива ет отбор продуктов жизнедеятельност (кала, мочи) с помощью вживленных катетеров, что травматично для животного и усложняет систему жизнеобеспечения. Наличие прилегающего ко стюма на примате противоестественно его обычному содержанию, что ухуд-. шает его гигиеническое состояние и при длительном содержании вызывает необходимость продувки подкостюмного пространства. Указанная система фиксации не имеет возможности создавать дозированные нагрузки на тело животного. Целью изобретения является улучшение гигиенических и физиологических условий содержания примата и повышение надежности фиксации путем автоматического управления степенью фиксации. Поставленная цель достигается тем, что устройство для фиксации примата при проведении исследований, содержащее креслообразный метал лический каркас с профилированной по поверхности тела примата амортизирующей прокладкой и средство крепления примата, содержит следящий привод, а на каркас установлены перегородки, столик и наклонная панель образуюгдае раздельные секции для верхних и нижних конечностей примата/ а средство крепления примата выполнено в виде двух ременных тяг, образующих в области груди примата манишку и соединенных со следящим приводом. Кроме того, следящий привод может содержать корпус, в котором размещен электродвигатель, механически соединенный с самотормозящейся червячной передачей, и два барабана с пазами для фиксирующих упоров, жестко закрепленных на валу ведсЗмой червячной шестерни, которая установлена на ва:ау с возможностью .поворота на нем и выполнена со скошенным торцом, подвижно сопряженным со скошенным торцом подпружиненного нажимного диска, другой торец которого взаимодействует со штоком переключателя, контакты которого включены в цепь питания электродвигателя, а барабаны соединены с ременными тягами, На фиг. 1 изображено устройство для фиксации приматов при проведении исследований, вид спереди; на фиг.2разрез А-А на фиг, 1; на фиг. 3 разрез Б-Б на фиг, 2: на фиг, 4 разрез В-В на фиг..1; нафиг, 5 разрез Р-Г на фиг. 2; на фиг, 6 разрез Д-Д на фиг. 2; на фиг. 7 разрез Е-Е на фиг. 6; на фиг. 8 - разрез- Ж-Ж на фиг, 6; на фиг. 9 - ЭЙД 3 на фиг. 6. Устройство состоит из креслообразного металлического каркаса 1 (фиг. 1 и 3),, на котором крепятся все узлы системы фиксации. В каркасе 1 без зазора на клею установлена амортизирующая прокладка 2 (фиг.2), выполненная, например, из пенополиуретана методом прессования по .гипсовому слепку по форме спины примата.в сидячем положении, В нижней части прокладка 2 имеет два подмозольных упора 3, переходящих в нишу 4 для сбора отходов, в эту же нишу 4 входят каналы 5 продувки воздуха. Вся поверхность б прокладки 2 обклеивается натуральным мехом 7 (мутоном) и только в зоне головы для устранения обгрызания прокладка 2 покрыта кожей 8 (фиг. 1) , С двух сторон через прорези каркаса 1 и прокладки 2 в зоне плеча , .установлены кожаные: плечевые захваты 9 (фиг. 4), одним концом неподвижно закрепленные на каркасе 1, а другим концом зажимаемые планкой 10 с винтами, захваты также обтянуты, натуральным мехом 7, На переднюю часть каркаса 1 установлено разборное быстросъемное приспособление 11 для размещения конечностей прийата. Нижняя часть приспособления 11 представляет собой профильный столик 12 (фиг, 3) из стеклопластика, обклеенный натуральным мехом в зонах соприкосновения с животным, в центре столика расположена перегородка 13 (фиг.5) , входящая в нишу 4 прокладки 2. Сторона перегородки 13, обращенная к примату, имеет желобок 14 для сбора мочи. Кроме того, перегородка 13 со столиком 12 и прокладка 2 образуют две замкнутые секции 15, в . которых- помещены левая и правая нижние конечности примата. Столик 12 с перегородкой 13 крепятся к подложке с помощью винтов 16 (фиг.1). Верхня часть приспособления состоит.из нак лонной прозрачной панели 17.с отвер стиями и центральной перегоро дкой 1 не доходящей до живота примата. Вер няя часть столика 12, перегородка 1 и наклонная панель 17 образуют две секции 19 для размещения в них лево и правой верхних конечностей. Верхняя часть приспособления крепится с помощью .винтов 16 с накаткой на кар кас 1. На металлический каркас 1 с помощью планок -10 крепятся два конца ременных тяг 20 (фиг.2), которые в области груди выполнены по ее и образуют манишку 21 (фиг.1). Последняя со стороны, обращенной к животному, обшита мехом/ а со стороны шеи облицована металлическими пластинками 22 для устранении от обгры зания. Другие два конца ременных тяг 20 через прорези в прокладке 2 и -каркасе 1 крепятся с помощью зажимных планок 10 на барабан 23 следящего привода 24 .(фиг. 2 и 9) . Следящий привод 24 представляет собой самостоятельный блок, закрепленный на каркасе 1 за спиной прима та. Он содержит корпус 25 (фиг.6), котором размещен электродвигатель 2 связанный с самотормозящимися червячнЕдаш передачами 27. Червячное ко лесо 28 имеет паз 29 с одной и скошенный торец с другой и установлено на.валу 30 с возможностью. поворрта на нем. На валу 30 жестко закреплена втулка 31, -в которую одним концом .вставлена пружина 32 кручения и заштифтован фиксирующий упор 33. Вторым концом пружина Установленачервячное колесо 28 На валу 30 с возможностью продольного перемещения за счет шпонки 34 установлен нажимной диск 35, имеющий со стороны, обращенной к червячному колесу 28, скос, аналогичный скосу червячного колеса 28, поджимаемый к нему пружиной 36. На стенках корпуса 25 закреплены микропереключатели 37 исходного положения и микропереключатели 38 конечного положения и телеметрии, электрически связанные с двигателем 26. Управление переключателем 37 осуществляется кулачком 39, укрепленным неподвижно на червячном колесе 28. Барабан 23 выполнен с пазами, в которых свободно перемещаются фиксирующие упоры 3,3, заштифтованные в корпусе 25. , Для снаряжения животного на Земле устройство для фиксации подготавливается следующим образом. С каркаса 1 снимается четырехсекционное приспособление 11, для чего отпускаются винты 16 и убирается нак лонная панель 17. После этого движением вверх вынимается профильЕ1ый столик 12, при этом перегородка 13 выходит из ниши 4. Освобождаются Две планки 10, крепящие подплечные захваты 9, и один конец их вытаскивается из. под планок, другой остается закрепленным. На барабанах 23 ослабляются винты 16 и вытаскиваются два крица ременных тяг 20, вторые два конца, закрепленные на каркасе 1, остаются зажатыми. После этого устройство для фиксации подготовлено к посадке в него примата. Посадка животного в устройство для фиксацииможет осуществляться в неусыпленном состоянии. Животное в специальной маске усаживают на подмозольные уступы 3, после чего, раздвинув нижние конечности, протягивают их под нижнигли концами ременных тяг 20 и, вставив перегородку 13 в нишу 4, закрепляют винтами 16 столик 12. Таким образом нижние конечности оказываются в секциях 15, после чего их можно не удерживать. Затем манишку 21 накладывают на грудь примата, -протягивают ременные тяги 20 через каркас 1 и прокладку .2 и закрепляют с помощью планок 10 на барабанах 23 так, чтобы между грудью и манишкой оставался промежуток (примерно 30-40 мм). Плечо охватывается захватами 9 и их концы пропускаются через каркас 1 и прокладку 2 и зажимаются планками 10 и винтами 16 так, чтобы захват не затяги|вал плечо, а оставался промежуток (10-15 мм). Удерживая верхние конечности примата, устанавливается наклонная панель 17, при этом конечности оказываются в секциях 19, после чего они опускаются. Подготовленные таким образом для фиксации приматы устанавливаются в систему жизнеобеспечения корабля-спутника. Перед воздействием на примата перегрузок, возникающие при выводе корабля на орбиту и спуске с нее или при создании дозированных перегрузок в невесомости -для снятия неблагоприятных ее воздействий, включается следящий привод 24.Электродвигатель 26 через червячные пары 27 передает вращение червячному колесу 28. Последнее начинает вращение на валу 30. и через пружину кручения 32, втулку 31 передает движение на барабаны 23, которые начинают наматывать на себя тяги 20. При этом маниижа 21 свободно движется к груди примата и выбрав зазор, который был между грудью и ней, начинает давить на грудь, прижимая тело животного к проклсщке 2 и оказьгеая противодействие дальней1 ему движению барабанов. Продолжая вращение на вйлу 30, червячное колесо 28 скручивает пружину 32, при этом, так как вал 30 орт новлен, скос червячного колеса 28 отталкивает нажимной диск 35, который начинает передвигаться в сторону переключателей 38, сжимая пружину 36. Достигнув при скручивании пружины определенной заданной величины усилия (примерно ра,вной весу примата), нажимной диск 35 воздействует на переключатели 38, один из которых, прекращает дальнейшее вращение электродвигателя 26, а другой передает информацию о эафиксированком положении. При остановке электро двигателя 26 фиксирунвдий упор 33 упирается в край паза 29, что позволяет при появлении перегрузок, направленных от спины на грудь/ не прилагать к животному дополнительных усилий за счет дальнейшего закручивания пружины 32.
При изменении животным позы или любом ослаблении ременных тяг 20, так как червячное колесо 28 остановлено и червячные пары самотормозящиеся, пружина 32 развернет через втулку 31 вал 30 с барабаном 23 и нажимным диском 35,который под действием пружины 36, скользя своим скосом по скосу червячного к6леса отойдет от переключателей 38, при этом включится электродвигатель и произойдет процесс, описанный выые/ т.е. автоматически тело примата прижимается тягами 20 и маниижой 21 к прокладке 2 о усилием, на которое построен следящий привод,
При подаче сигнала на снятие нагрузки электродвигатель 26 включается в реверсном режиме и происходит процесс, обратный описанному, кулачок 39, отпуская микропереклю1чатель 37, остановит электродвигатель 26. Фиксирукхций упор 33 упрется в край паза 29 на барабане 23 и, если примат будет телом двигать ременные тяги, вращение барабанов 23 и закручивание пружины происходить не будет.
В невесомости при длительном содержании в устройстве для фиксации примата сбор продуктов жизнедеятельности производится направленным постоянным воздутаным потоком (от головы вниз). Часть потока заходит через отверстия в наклонной панели 17 под профильный столик 12 и при акте мочеиспускания захватывает жидкие экскременты и по жеЛобу 14 доставляет их в ниму 4, туда же поступают и твердые отходы. Изнш и 4 этим же потоком они транспортируются в сборник отходов. При плотном прилегании
тела k ниие 4 часть воздушного потока заходит через боковые каналы 5. Находясь в секциях 15,. нижние конечности имеют возможность передвигаться в них со степенью ограничения, обусловленной стенками этих секций, т.е. примат может работать ими как оператор по программе (например , ножным динамометром ) , причем одной конечностью он не может срывать накладные датчики с другой конечности. Аналогично примат имеет возможность верхними конечностями, помещенными в секции 19/ работать с приборами и кнопками,, расположенными перед ним, но не может доставать до головы и других частей тела.
.На предприятии было изготовлено два опытных образца устройства и проведены наземные биотехнические испытания в спускаемом аппарате космического корабля в системе жизнеобеспечения, рассчитанной на 15 сут пребывания примата (макака резус) в невесомости. Испытания подтвердили технические преимущества изобретения в сравнении с прототипом.
С помощью четырехсекционного приспособлен.ия для размещения конечностей,. ременных тяг и плечевых захватов обеспечивается надежная фиксация животного, что не позволяет ему освобождаться из устройства. Кроме того, тело с помощью следящего привода автоматически через ременные тяги прижимается к прокладке, при этом не нарушается комфортность содержания и состояния животНОГО,
Находящиеся в устройствах, фиксаии животные в течение всего эксперимента в толняли конечностями сложную программу операторской деятельности на ручных и ножных дина:1юметрах;и тестовых приборах ., При .
этом обеспечивается сохранность накадных датчиков на нижних конечностях, на спине, в подмьпечной впаине и фишек отведений центральных электродов на голове.
Обеспечивается автоматическая степень фиксации при изменении положения и дозированная нагрузка. существляемая следящим приводом в пределенное программой время. Крое того, обеспечиваются хорошие гигиенические условия содержания - беспечивается отвод продуктов жизнедеятельности и животное остается сухим и без потертостей.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фиксации примата при проведении исследований | 1984 |
|
SU1204207A2 |
| Устройство для фиксации примата при проведении исследований | 1988 |
|
SU1659038A1 |
| Устройство для автоматического кормления лабораторных животных | 1987 |
|
SU1482624A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| УЧЕБНО-НАГЛЯДНОЕ ПОСОБИЕ L-МИКРО ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ ЯВЛЕНИЙ | 2004 |
|
RU2293374C2 |
| Устройство для фиксации примата | 1989 |
|
SU1606117A1 |
| Устройство для схвата к протезам верхних конечностей | 1977 |
|
SU689670A1 |
| Двухвалковая дробилка | 1989 |
|
SU1719057A1 |
| СТОЛИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2271732C1 |
| Устройство для обработки поверхности корпуса судна в доке | 1978 |
|
SU789319A1 |


1. УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ПРИМАТА ПРИ ПРОВЕДЕНИИ ИССЛЕДОВАНИЙ, содержащее креслообразнЫй металлический каркас с профилированной по поверхноститела примата амортизирующей прокладкой и средство крепления примата, отличающееся тем, что, с целью улучшения гигиенических и физиологических условий содержания примата и повышения надежности фиксации путем автоматического управления степенью фиксации, оно содержит следящий привод, а на каркасе установлены перегородТса, столик и наклонная панель, образующие раздельные секции для верхних и нижних конечностей примата, а средство крепления примата выполнено в виде двух ременных тяг, образующих в области груди примата манишку и соединенных со следящим приводом. 2. Устройство по п. 1, о т л и чающе еся тем, что следящий привод содержит корпус, в котором размещен электродвигатель, механически соединенный с самотормозящейся червячной передачей, и два барабана с пазами для фиксирующих упоров, жестко закрепленных на валу ведомой чер-. вячной шестерни, которая установле- g на на валу с возможнортью поворота (Л на нем и выполнена со скошенным торцом, подвижно сопряженным со скошенным торцом подпружиненного нажимного диска, другой конец которого взаимодействует со штоком переключателя, с контакты которого включены в цепь питания электродвигателя, а барабаны соединены с ременными тягами.
/5
Г-г
л-л
Д/ t I i --I
1Гч -H h-/l
J/
НФ Фиг Л
«
j# Фиг.8 Фиг.9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Hoffman Р.А | |||
| et al, Compa;rison of Calcium and Phosphorus Excretion with Bone Density Chan.ges during Restraint in immature Macaca names trina Primates | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
