2, Устройство по п. 1, отличающееся тем, что блок фазо вой автоподстройки частоты выполнен N -канальным, при этом каждый канал состоит из последовательно соединенных фазового детектора, цифрового интегратора, цифрового фазовращателя и двухвходового элемента И, причем входы фазовых детекторов объединены и подключены к сигнальному входу блока фазовой автоподстройки частоты, вторые входы двухвходовых элементов И соединены с соответствующими N управляющими входами блока фазовой автоподстройки частоты, а выходы двухвходовых элементов И соединены с управляющими входами фазовых детекторов и с N выходами блока фазовой автоподстройки частоты.
3. Устройство по пп. 1 и 2, отличающееся тем, что блок измерения амплитуды выполнен в виде
элемента сравнения, первый вход koToporo соединен с входом блока измерения амплитуды, входного коммутатора, соединенного с выходом элемента сравнения, N цифровых фильтров, состоящих из дискретных усредняющих элементов и цифровых интеграторов, причем сигнальные входы цифровых фильтров подключены к выходам входного коммутатора, их управляющие входы объединены и подключены k управляющему входу блока измрения амплитуды, а входы N цифровых фильтров подключены к информационным входам выходного коммутатора, и цифроаналогового преобразователя, вход которого соединен с выходами блока измерения амплитуды и выходного коммутатора, а выход подключен к второму входу элемента сравнения, причем управляющие входы коммутаторов соединены с управляющим входом блока измерения амплитуды.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ВЗАИМНОЙ КОРРЕЛЯЦИОННОЙ ФУНКЦИИ В РАЗНЕСЕННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 1999 |
|
RU2163383C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОДУЛЯТОР ДИСКРЕТНОГО СИГНАЛА ПО ВРЕМЕННОМУ ПОЛОЖЕНИЮ | 2018 |
|
RU2677358C1 |
| СПОСОБ И УСТРОЙСТВО БЕСКОДОВОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2007 |
|
RU2363099C2 |
| ПРИЕМНОЕ УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС | 1995 |
|
RU2084919C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
| Устройство синхронизации | 1979 |
|
SU773944A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЦИФРОВОГО ПРИЕМНИКА | 1996 |
|
RU2138907C1 |
1.УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ СИГНАЛОВ, содержащее фильтр, блок фазовой автоподстройки частоты и блок изменения амплитуды, соединенный с выходом фильтра, о т л ич а ю 14 е е с я тем, что, с целью повышения точности измерения и расччирения функциональных возможностей, в него дополнительно введены блок синхронизации, блок управляемых задержек, восстанавливающий фильтр и бинарный квантователь, при этом Выход фильтра подклчюен к входам блока синхронизации и бинарного квантователя, выход бинарного квантователя соединен с сигнальным входом блока фазовой автоподстройки частоты, выходы блока синхронизации соединены с управляющими входами блока фазовой автоподстройки частоты и с управляющим входом блока управляемых задержек, выходы блока фазовой автоподстройки частоты соединены с информационными входами блока управляемых задержек, первый выход которого.подключен к первому (Л входу восстанавливающего фильтра, а второй выход подключен к управляющему входу блока измерения амплитуды, выход которого подключен к второму входу восстанавливающего фильтра. , 
Изобретение относится к области электроизмерений, в частности к устройствам для измерения формы сигналов, и может быть использовано для измерения формы сигналов, излучаемых станциями импульснр-фазовых радионавигационных систем.
Известно устройство для измерени формы сигнала, содержащее элемент сравнения (нуль-орган), первый вход которого является входом устройства преобразователь код-напряжение, выход которого соединен с вторым вхдом элемента сравнения, генератор образцовой частоты, соединенный через счетчик импульсов с входом преобразователя код - напряжение, анализатор, вход которого срединен с выходом элемента сравнения, а выход через блок выбора адреса подключен к первому входу запоминающего блока два других входа которого подключены соответственно к преобразователю код - напряжение и счетчику импульсов 1 .
Это устройство является устройством неследящего типа, осуществляющим регистрацию параметров сигнала по одной реализации. Особенностью известного устройства является измерение формы сигнала по особым точкам - точкам чередующихся наибол ь ишх и наименьших значений сигнала и моментов их наступления.
Недостатком устройства является большая флтпктуационная погрешность
измерения при малых соотношениях сигнал-шум. Попытка увеличения соотношения сигнал - шум для увеличения точности измерения путем предварительной фильтрации сигнала линейным избирательными цепями приводит к искажению формы сигнала.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения формы сигналов, содержащее последовательно включенные усилитель и фильтр, блок автоматической регулировки а тлитуды, вход которого соединен с выходом фильтра, а выход подключен к управляющему входу усилителя, блок фазовой автоподстройки частоты, первый вход которого соединен с выходо фильтра, а второй вход подключен к выходу источника опорного напряжения, блок измерения амплитуды, три входа которого соединены соответственно с входом усилителя, выходом блока автоматической регулировки амплитуды и с выходом блока фазовой автоподстройки частоты, и блоки регистрации фазы и амплитуды, соединенные соответственно с выходами блоков фазовой автоподстройки частоты и измерения амплитуды 2 .
Недостатком устройства является низкая точность измерения, обусловленная тем, что фильтр вносит искажения в форму сигнала вследствие неравномерности его амплитудно-частотной характеристики, а также различных фазовых сдвигов гармоник различной частоты, определяемых фа зочастотной характеристикой. К недостаткам данного устройства .относится также возможность измерения амплитуды и фазы лишь в одной точке сигнала а также исполнение на аналоговой элементной базе, не позволяющей добиться большой стабильности параметров и, как следствие этого, высокой инструментальной то ности измерения.
Цель изобретения - повышение : точности измерения, а также расширение функциональных возможностей за счет реализации одновременного измерение сигнала с N точках С последующим восстановлением формы радиоимпульса.
Поставленная цель достигается тем, что в устройство для измерения формы сигналов, содержащее фильтр, блок фазовой автоподстройки частоты и блок измерения амплитуды, соединенный с выходом фильтра, дополнительно введены блок синхронизации, блок управляемых задержек, восстанавливающий фильтр и бинарный квантватель, при этом выход фильтра подключен к входам блока с-инхронизации и бинарного квантователя, выход бинарного квантователя соединен с сигнальным входом блока фазовой автоподстройки частоты, выходы блока синхронизации соединены с управляющими входами блока фазовой автоподстройки частоты и с управляющим входом блока управляемых, задержек, выходы блока фазовой автоподстройки частоты соединены с информационными входами блока управляемых задержек, первый выход которого подключен к первому входу восстанавливающего фильтра, а второй выход подключен к управляющему входу блока измерения амплитуды, выход которого подключен к второму входу восстанавливающего фильтра.
Блок фазовой автоподстройки частоты выполнен N -канальным, при этом каждый канал состоит из последовательно соединенных фазового детектора, цифрового интегратора, цифрового фазовращателя и двухвходового элемента И, причем входы фазовых детекторов объединены и подключены к сигнальному входу блока фазовой автоподстройки частоты, вторые входы двухвходовых элементов И соединены с соответствующими W управляющими входами блока фазовой автоподстройки частоты, а выходы двухвходовых элементов И соединены с управляющими входами фазовых детекторов и с N выходами блока фазовой автоподстройки частоты...
Кроме того, блок измерения амплитуды выполнен в виде элемента сравнения, первый вход которого соединен с входом блока измерения амплитуды, входного коммутатора, соединен5 ного с выходом элемента сравнения, N цифровых фильтров, состоящих из дискретных усредняющих элементов и цифровых интеграторов, причем сигнальные входы цифровых фильтров
0 подключены к выходам входного коммутатора, их управляющие входы объединены и подключены к управляющему входу блока измерения амплитуды, а выходы N цифровых- фильтров под5 ключены к информационным входам выходного коммутатора, и цифро-аналогового преобразователя, вход которого соединен с выходами блока измерения амплитуды и выходного комму0 татора, а выход подключен к второму входу элемента сравнения, причем управляющие входы коммутаторов соединены с управляющим входом блока измерения амплитуды.
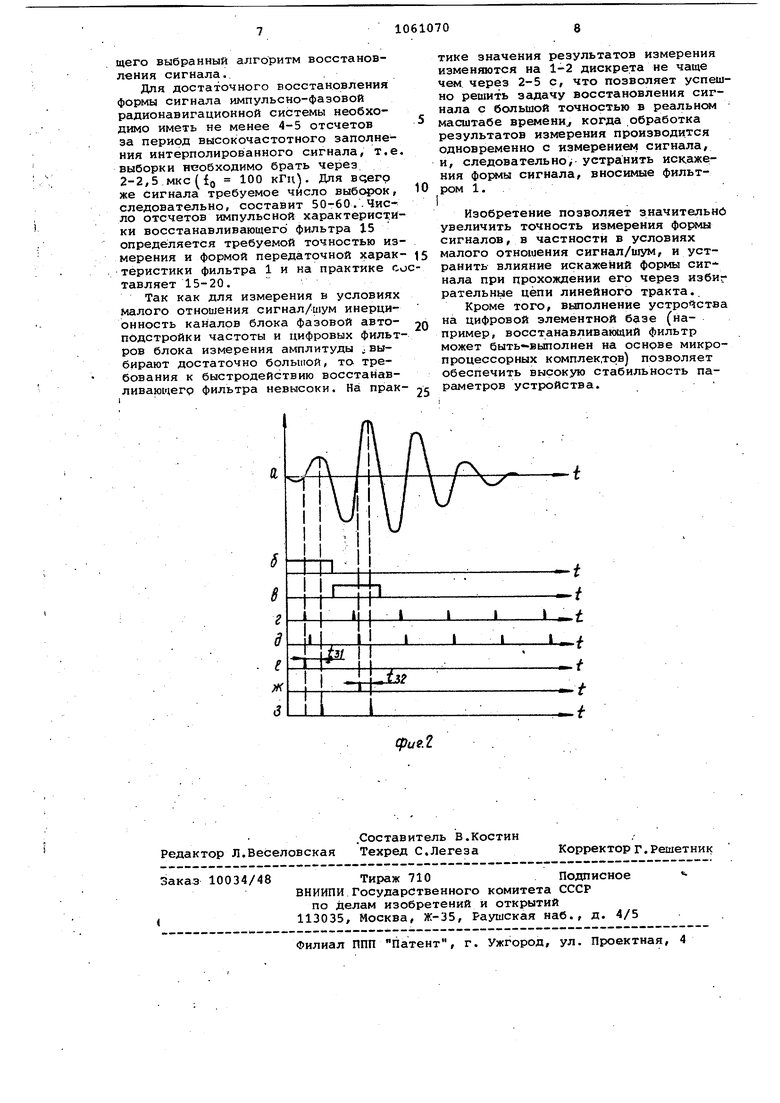
5 На фиг. 1 представлена блок-схема устройстваJ на фиг. 2 - временные диаграммы, поясняющие работу устройства.
Устройство содержит фильтр 1,
. блок 2 синхронизации, бинарный квантователь 3, N каналов блока фазовой автоподстройки частоты, каждый из которых состоит из фазового детектора 4, цифрового интегратора 5, цифрового фазовращателя 6, двухвхо5 дового элемента 7 и; блок 8 управляемых задержек, блок измерения амплитуды, который состоит из элемента 9 сравнения входного коммутатора 10, Н цифровых фильтров, реали0 зованных как последовательное соединение дискретного усредняющего элемента 11 и цифрового интегратора 12, выходного ко.ммутатора 13, цифроаналогового преобразователя 14,
5 а также восстанавливающий фильтр 15.
Рассмотрим работу устройства на примере измерения формы сигналов импульсно-фазовой радионавигационной системы, представляющих радиоимпульс с экспоненциальностепенной
0 функцией огибающей, изменяющейся по телу сигнала частотой заполнения и средней частотой заполнения равной 100 кГц (фиг. 2а).
Устройство осуществляет измерение
5 временного положения точек перехода сигнала через ноль и измерение значений амплитуды полупериодов высокочастотного заполнения, временное положение которых жестко связано
0 с временным положением переходов сигнала через ноль. Получаемый при этом объем информации при узкой полосе сигнала полностью характерит зует фазу и амплитуду исследуемого
5 радиоимпульса,т.е.всю форму сигнала. Входной .сигнал поступает на вход фильтра 1, представляющего собой активный полосовой фильтр, настрое ный на частоту 100 кГц. Фильтр 1 осуществляет усиление входного сигнала и его фильтрацию на фоне помех. Выходной сигнал фильтра 1 поступает на вход блока 2 синхронизации, который производит поиск сигнала и. определяет моменты времени его начала. Необходимость этого свя зана с тем, что длительность сигнала мала по сравнению с периодом его повторения длительность сигнала 120-150 МКС, а период повторения не менее 1 мс). Блок 2 синхронизации осуществляе формирование временных окон фиг. 26, в), которые поступают на вторые входы двухвходовых элементов 7 И каналов блока фазовой автоп стройки частоты для определения периода, в котором производится измерение . Каждый из каналов блока фазовой автоподстройки частоты работает сле дующим об ра 3 ом. Сигнал с выхода бинарного кванто вателя 3 поступает на вход фазового детектора 4, где производится сравнение фаз входного сигнала и сигнал с выхода цифрового фазовращателя б и вырабатьшается сигнал ошибки в виде соответствующей кодовой комбинации, которь й определяет разност фаз входных сигналов в момент сравнения. Выходной сигнал цифрового фазового детектора 4 подвергается обработке в цифровом интеграторе 5, который подобно обычному фильтру низких Частот производит коррекцию передаточной функции блока фазовой автоподстройки частоты. Это достига ется усреднением отсчетов мгновенных значений сигнала с цифрового фазового детектора 4. Цифровой фазо вращатель 6 изменяет фазу выходного сигнала с определенным дискретом в соответствии с поступающими сигна лами с выхода цифрового интегратоjia 5 таким образом, чтобы ее рассогласование с фазой измеряемого сигнала было минимальным. Сигнал цифрового фазовращателя 6 (фиг. 2 г, д) поступает на первый вход двухвходового элемента 7 И, где происходит выделение необходимого строба слежения (фиг. 2, е,ж. Слежение за экстремальными точками сигнала, а именно заамплитудой полупериодов высокочастотного заполнения, осуществляется в моменты времени, определяемые стробами с выхода блока 8 управляемых задержек (фиг, 2, з). Эти стробы формируются по стробам слежения каналов .блока фазовой автоподстройки часто ты (фиг. 2, е, ж) за моментгми пере {одов через ноль полупериодов высокочастотного заполнения с задержкой равной Т/4, где Т - период высокочастотного заполнения, известный априорно с достаточной точностью. В общем случае длительность периода меняется по телу сигнала, так как в сигналах ИФРНС наблюдается некоторая частотная модуляция, известная для сигналов ИФРНС ЛОран-С. Поэтому задержка может быть различной для различных полупериодов высокочастотного заполнения. Так для первого периода высокочастотного заполнения величина задержки равна t-j второго и т.-д. Незадержанные стробы (фиг. 2, е, ж) поступают на первый вход вос-; станавливающего фильтра 15 с первого выхода блока 8 управляемых задержек. Одновременно входной сигнал с выхода фильтра 1 поступает на вход элемента 9 сравнения (фиг. 2, а). В моменты времени, определяемые временным положением стробов с выхода блока 8 управляемых задержек (фиг. 2, з) , результат сравнения входного сигнала (фиг. 2, а) и выходного напряжения цифроаналогового преобразователя 14 через входной коммутатор 10 поступает на вход соответствующего цифрового фильтра, состоящего из дискретного усредняющего элемента 11 и цифрового интегратора 12. Сигнал переполнения с выхода дискретного усредняющего элемента 11 поступает на вход цифрового интегратора 12, изменяя его состояние. Через выходной коммутатор 13 замыкается петля слежения за экстремальными значениями сигнала. Последовательное подключение цифровых фильтров позволяет организовать слежение за несколькими экстремальными точ- ками сигнала. Причем в каждом цифровом интеграторе 12 хранится информация об одной точке измерения. Цифроаналоговый преобразователь 14 преобразует состояние цифрового интегратора 12 каждого цифрового фильтра в аналоговую величину выходного напряжения, которое поступает на второй вход элемента 9. Кроме того, выходной коммутатор 13 обеспечивает также передачу состояния каждого цифрового интегратора 12 на вход восстанавливающего фильтра 15. Восстанавливающий фильтр 15 представляет собой специализированное вычислительное устройство, которое производит интерполяцию сигнала по отсчетам, полученным с блока измерения амплитуды и блока 8 управляем1-лх задержек, а также выполняет цифровую свертку интерполированного сигнала со значениями импульсной xapaKrejnic гики цифрового фильтра, pea л из у --щего выбранный алгоритм восстановпения сигнала. Для достаточного восстановления формы сигнала импульсно-фазовой радионавигационной системы необходимо иметь не менее 4-5 отсчетов за период высокочастотного заполнения интерполированного сигнала, т.е выборки необходимо брать через 2-2,5 МКС (i 100 кГц). Для вс;егр же сигнала требуемое число выбсч ок, следовательно, составит 50-60..Число отсчетов импульсной характеристи ки восстанавливающего фильтра 15 опреде ляется требуемой точностью из мерения и формой передаточной харак теристики фильтра 1 и на практике с тавляет 15-20. Так как для измерения в условиях малого отношения сигнал/шум инерционность каналов блока фазовой автопОдстройки частоты и цифровых фильт ров блока измерения амплитуды выбирают достаточно большой, то требования к быстродействию восстанавливающего фильтра невысоки. На прак тике значения результатов измерения изменяются на 1-2 дискрета не чаще чем через 2-5 с, что позволяет успешно решить Зсщачу восстановления сигнала с большой точностью в реальнс масштабе времени когда обработка результатов измерения производится одновременно с измерением сигнала, и, следовательноу устранить искажения формы сигнала, вносимые фильтром 1. . Изобретение позволяет значительнй увеличить точность измерения сигналов, в частности в условиях малого отношения сигнал/шум, и устранить влияние искажений формы сигнала при прохождении его через избиг рательные цепи линейного тракта. Кроме того, выполнение устройства на цифровой элементной базе (например, восстанавливающий фильтр может быть-выполнен на основе микропроцессорных комплек.трв) позволяет обеспечить высокую стабильность параметров устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения и регистрации амплитуды знакопеременного импульсного напряжения | 1972 |
|
SU444991A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивлиев А.Д., Зиновьев В.Е, Следящий измеритель амплитудьг и фазы низкочастотных синусоидальных сигналов | |||
| - Приборы и техника эксперимента, 1978, № 1, с | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
