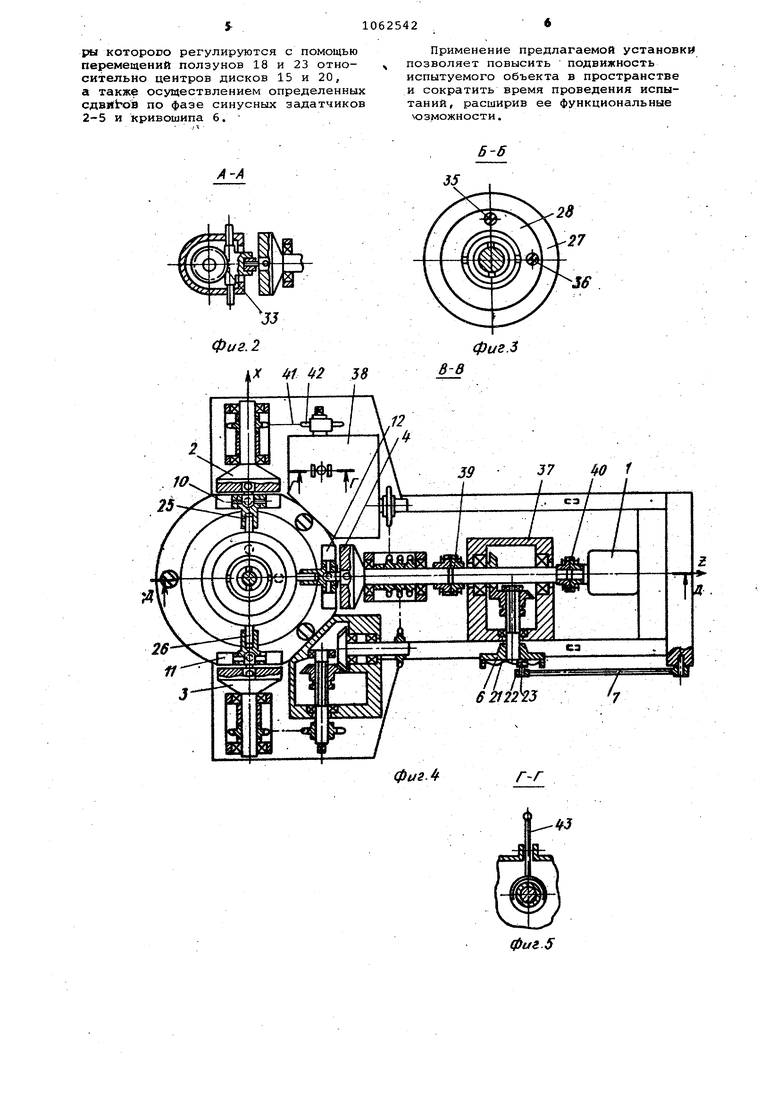
Изобретение относится к техничес ким средствам экспериментальной гид ромеханики и, в частности, к устано кам для получения гидродинамических коэффициентовразличных тел. По основному авт.св. № 981078 известна установка для создания кол бательных движений объекта (модели) при электродинамических испытаниях, содержащая электродвигатель, кинема т ически связанный с задающим колебательным механизмом, включающим два синусных задатчика с выходными штокам и связанный с последними исполнительн механизм, соединенный с узлом крепления объекта, причем эадакндий коле бательный механизм снабжен двумя дополнительными синусными задатчиками с выходными штоками, и исполни тельный колебательный механизм содержащий кольцевую обойму с установ ленной в ней с возможностью поворот три полуоси с установленными на них с возможностью перемещения цилиндри ческими направляющими, выходной вал и две тяги, тогда как узел крепления объекта содержит карданный подвес, при этом цилиндрические направ ляющие шарнирно связаны с тремя расположенными параллельно друг . другу выходными штоками трех синусных задатчиков, выходной шток четвертого с инусного задатчика перпенд кулярен к выходным штокам первых трех синусных задатчиков, упомянута платформа выполнена с центрально расположенным отверстием, через которое пропущен выходной вал, связанный посредством дополнительного карданного подвеса с платформой, концы трех полуосей прикреплены к кольцевой обойме, при этом два параллельных между собой выходных штока расположены в плоскости, проходящей через центр платформы и перпендикулярной к плоскости, проходящей через центр платформы и третий выходной шток, параллельный первым двум штокам, одни концы двух тяг шарнирно связаны с платформой, другие концы тяг шарнирно связаны с наружным кольцом карданного подвеса объекта, выходной вал установлен с возможностью поворота вокруг своей оси и с возможностью перемещения вдоль последней, параллельной упомянутым трем штокам, и связан одним концом с карданным подвесом объекта а другим концом - кинематической цепью с выходным штоком четвертого синусного задатчика. Кроме того, кинематическая цепь содержит зубчатую передачу, ведомое звено которой связано посредством шлицевого соединения с вторым концом выходного вала l . Однако такая установка обеспечивает ограниченную подвижность испытуемого объекта (только в четырех степенях свободы), вследствие чего для получения части коэффициентов необходимо производить перемонтаж испытуемого объекта, что ведет к увеличению времени проведения испытений. . 4 Целью изобретения является повы:шение подвижности объекта в пространстве (до пяти степеней свободы) и сокращение времени проведения испытаний. Для этого установка для создания колебательных движений объекта при аэрогидродинамическихиспытаниях снабжена кривошипно-шатунным механизмом, кривошип которого кинематически связан с электродвигателем, а также выполнен с рамой и основанием, причем установка смонтирована на раме с возможностью перемещения относительно основания, а шатун механизма шарнирно закреплен на основании. На фиг. 1 представлена предлагаемая установка, общий вид; на фиг. 2 разрез А-А на фиг. 11 на фиг. 3 разрез Б-Б на фиг. 1;на фиг, 4 разрез В-В на фиг. 1 на фиг. 5 разрез Г-Г на фиг. 4 на фиг. б разрез Д-Д на фиг. 4 на фиг. разрез Е-Е на фиг. 6 на фиг. разрез Ж-Ж на фиг. 6. Установка содержит электродвигатель 1, четыре синусных задатчика 2-5 задающего колебательного механизма, исполнительный колебательный механизм, кривошипно-шатунный механизм, состоящий из кривошипа 6 и шатуна 7, раму 8 и основание 9. При этом трисинусных задатчика 2-4 выполнены с параллельными выходными штоками 10-12, а четвертый - с выходным штоком 13, который перпендикулярен первым трем. Синусные задатчики 2-5 состоят из валов 14, дисков 15, ходовых винтов 16, гаек 17 и ползунов 18, которые входят в пазы кулис 19 выходных штоков 10-13. Кривошип 6 состоит из диска 20, ходового винта 21, гайки 22 и ползуна 23. С параллельными выходными штоками 10-12 посредством шарниров 24 связаны цилиндрические направляющие 25 исполнительного колебательного механизма, надетые на полуоси 26, закрепленные радиально и в одной плоскости на кольцевой обойме 27. При этом оси двух полуосей 26 соосны, а ось третьей полуоси 26 перпендикулярна первым двум. Внутри обоймы 27 установлена с возможностью поворота платформа 28 в виде диска, выполненная с центрально расположенным отверстием, через которое пропущен выходной вал 29. На одном конце последнего размещен карданный подвес 30 для крепления объекта. Выходной вал 29 связан с платформой 28 посредством дополнительного карданног подвеса 31, смонтированного в отвер стии платформы 28, и расположен параллельно выходным штокам 10-12 синусных задатчиков (внутреннее кольцо карданного подвеса 31 соединено шарнирно с выходным валом 29 и платформой 28, при этом оси шарни ров установлены в одной плоскости и взаимно перпендикулярны друг другу) Два параллельных между собой выходных штока 10 и 11 расположены в плоскости, проходящей через центр платформы 28 и перпендикулярной к плоскости, проходящей через центр платформы 28 и третий выходной шток 12, параллельной первым двум штокам 10 и 11. Выходной вал 29 установлен с возможносу5:ью поворота вокруг свое оси 0-0 и с возможностью перемещени вдоль последней и связан одним концом с карданным подвесом 30, а друг концом посредством шлицевого соединения 32 через ведомое звено кинема тической цепи, например, зубчатой передачи 33 с выходным штоком 13 четвертого синусного задатчика 5. Платформа 28 и наружное кольцо карданного подвеса 30 объекта объедине посредством шарниров 34 с концами двух тяг 35 и 36, параллельных выхо ному валу 29. Электродвигатель 1 соединен с синусными задатчиками 2и кривошипом 6 через редукторы 37 и 38, муфты 39 и 40 цепи 41 и звёздочки 42. Редукторы 37 и 38 снабжен устройствами расцепления зубчатых передач 43, обеспечивающими возможность взаимного фазового сдвига синусных задатчиков 2-5 и кривошипа б кривошипно-шатунного механизма. Синусный задатчик 5 снабжен зубчатой муфтой 44, полумуфта которой поджата пружиной 45 и выполнена с. возможностью скольжения по валу 1 с помощью шлицевого соединения 46. Рама 8 и основание 9 выполнены с возможностью относительного перемещения, для чего в раме 8 установлены ролики 47, а основание снабжено направляющими 48. Шатун 6 кривошипно-шатунного механизма шарнирно соединен с основанием 9, причем ось шатуна 6 установлена параллельн направляющим 48 основания 9. Установка работает следующим образом. Объект (модель) 49 крепится к выходному валу 29 через кардан:ный подвес 30. Синусные задатчики приводятся во вращение электродвигателем 1. Для создания колебаний объекта 49 относительно оси X ползуны 18 синусных задатчиков 2, 3 и 5, а так же ползун 23 устанавливаются в сере динах дисков 15 и 20 с помощью ходо вых винтов 16 и 21, а амплитуда колебаний регулируется перемещением ползуна 18 синусного задатчика 4. При вращении синусного задатчика 4 его выходной шток 12 колеблется в плоскости , передавая колебания платформе 2о и далее через тягу 36 объекту 49. Для создания колебаний объекта 49 относительно оси 2. ползуны 18 задатчиков 4 и 5, а также ползун 23 кривошипа 6 кривошипно-шатунного механизма устанавливаются в серединах дисков 15 и 20, а амплитуда колебаний регулируется равным и противоположным перемещением ползунов 18 от центра дисков 15 синусных задатчиков 2 и 3. При вращении синусных задатчиков 2 и 3 их выходные штоки 10 и 11 колеблются в плоскости ХУ в противофазе, передавая свои колебания платформе 28 и далее через тягу 35 объекту 49. Для создания колебаний объекта 49 относительно оси У ползуна 18 задатчиков 2, 3 и 4, а также ползун 23 кривошипа 6 кривошипно-шатунного механизма устанавливаются в серединах дисков 15 и 20, а амплитуда колебаний регулируется перемещением ползуна 18 синусного задатчика 5. При вращении синусного задатчика 5 его выходной шток 13 колеблется в плоскости 42 , передавая через зубчатую передачу 33 и шлицевое соединение 32 свои колебания платформе 28 и далее через обе тяги 35 и 36 и выходной вал 29 объекту 49. Для создания гармонического возвратно-поступательного движения объекта 49 вдоль оси У ползун 18 синусного задатчика 5, а также ползун 23 кривошипа 6 кривошипно-шатунного механизма устанавливаются в серединах дисков 15 и 20, а амплитуда колебаний регулируется перемещениями ползунов 18 синусных задатчиков 2-4 в одну сторону. При вращении синусных задатчиков 2-4 их выходные штоки 10-12 колеблются в плоскостях ХУ и yz синфазно,передаЬая свои колебания платформе 28,и далее через выходной вал 29 и обе тяги 35 и 36 объекту 49. Для создания гармонического , возвратно-поступательного движения объекта 49 вдоль оси 2 ползуны 18 синусных задатчиков 2-5 устанавливаются в серединах дисков 15 и 20, а амплитуда колебаний регулируется перемещением ползуна 23 кривошипа 6, При вращении кривошипа 6 кривошипношатунн.ого механизма установка с рамой 8 вместе с объектом 49 колеблется в плоскости Xt. При одновременной работе всех синусных задатчиков совместно с кривошипно-шатунным механизмом и установке в них ползунов 18 и 23 на различных расстояниях от центра дисков 15 и 20 объект 49 совершает пространственное движение, параметры KOTopoDO регулируются с помощью перемещений ползунов 18 и 23 относительно центров дисков 15 и 20, а также осуществлением определенных сдвкЬов по фазе синусных эадатчиков 2-5 и кривошипа б.
Применение предлагаемой установки позволяет повысить подвижность испытуемого объекта в пространстве и сократить время проведения испытаний, расширив ее функциональные юзможности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1983 |
|
SU1132167A2 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1981 |
|
SU981078A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Волнопродуктор Абатурова С.В. и Зарубы В.Ф. | 1982 |
|
SU1051400A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| Стенд для испытания карданных передач | 1990 |
|
SU1725081A1 |
| ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143375C1 |
| Устройство для демонстрации и исследования колебательных движений | 1980 |
|
SU957250A1 |
| Вибрационный механизм для сообщения колебаний изделиям в установке для жидкостной очистки | 1983 |
|
SU1140844A1 |

УСТАНОВКА ДЛЯ СОЗДАНИЯ КОЛЕБАТЕЛЬНЫХ ДВИЖЕНИЙ ОБЪЕКТА ПРИ АЭРОГИДРОДИНАМИЧЕСКИХ ИСПЫТАНИЯХпо авт.св. № 981078, отличающ а я с я тем, что, с целью повышения подвижности рбъекта в пространстве и сокращения времени проведения испытаний, она снабжена кривошипношатулным механизмом, кривошип которого кинематически связан с электродвигателем, а также выполнен с рамой и основанием, причем установка смонтирована на раме с возможностью перемещения относительно основания, а шатун механизма шарнирно закреплен на основании.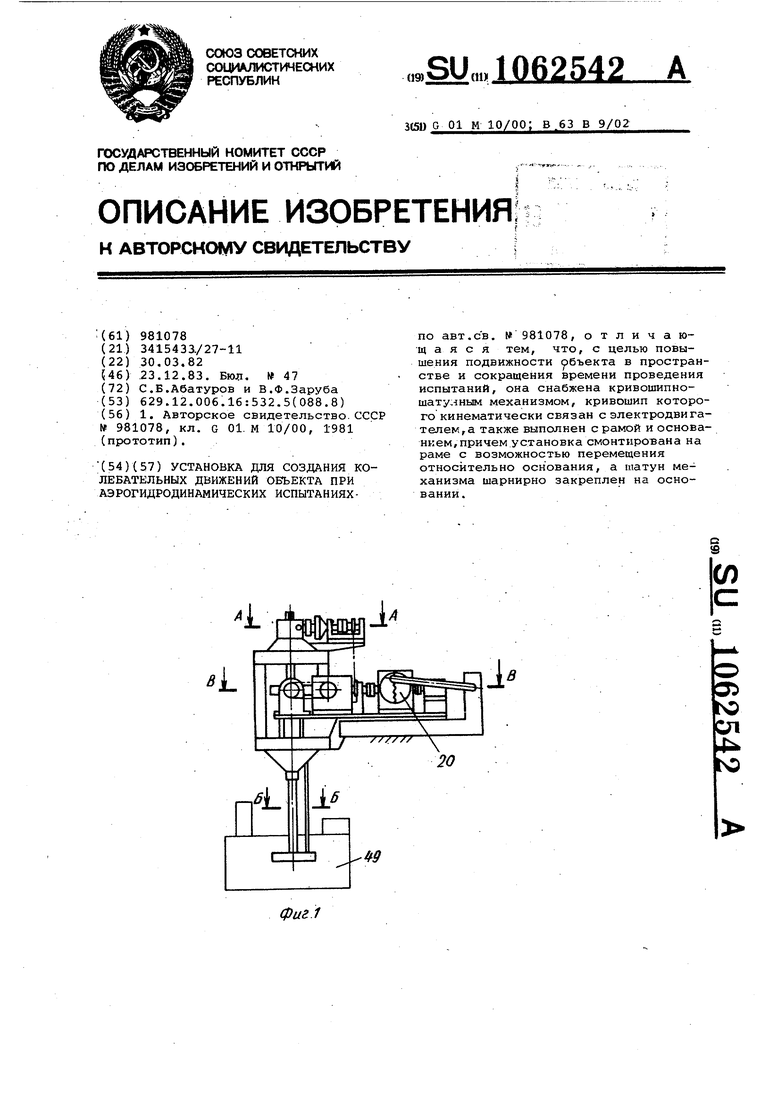
фиг Л
Фив 6
фиг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1981 |
|
SU981078A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| ; | |||
