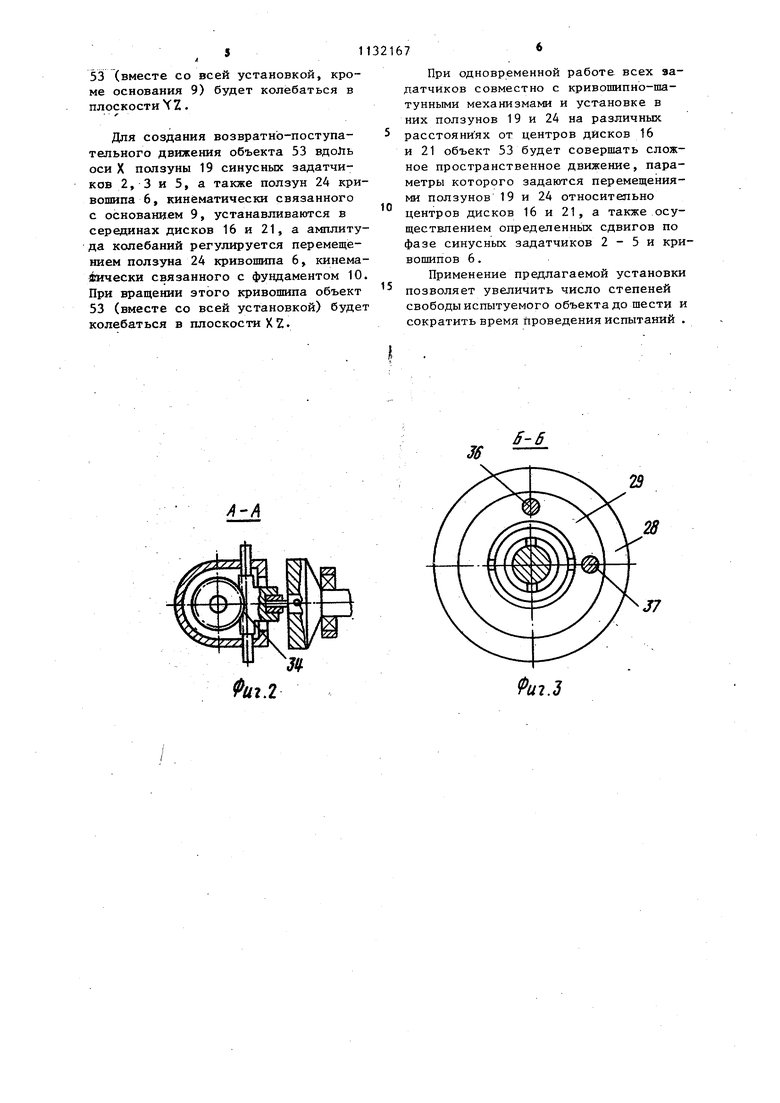
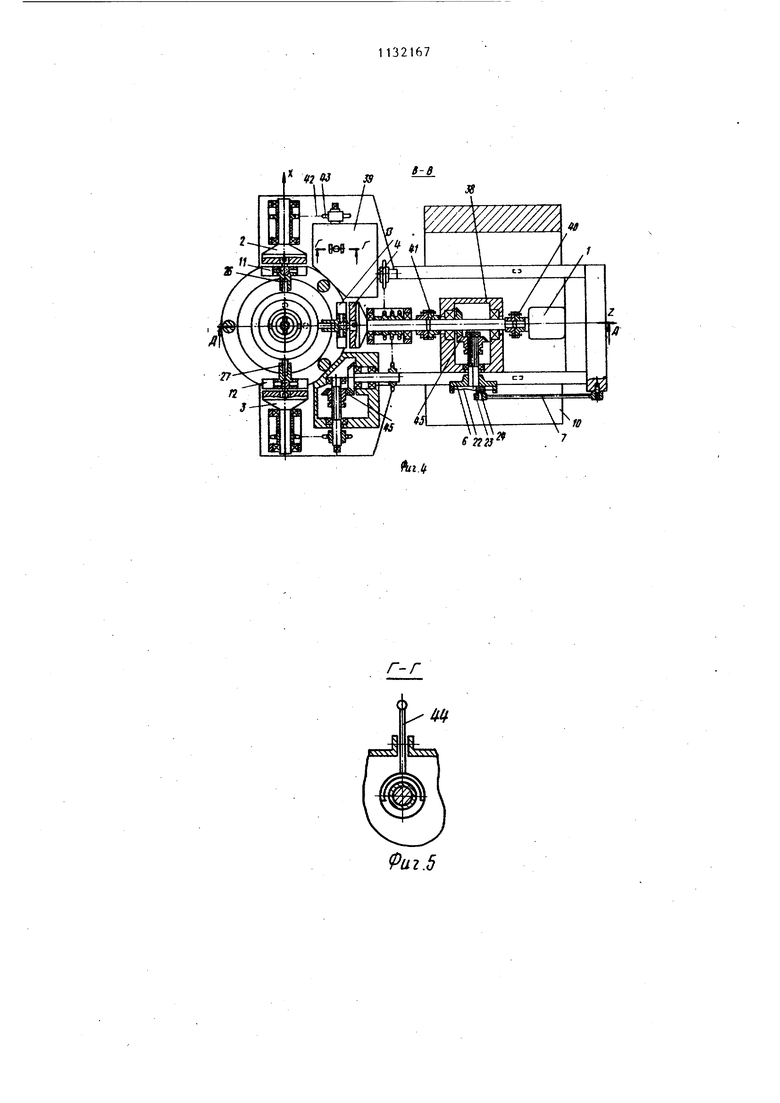
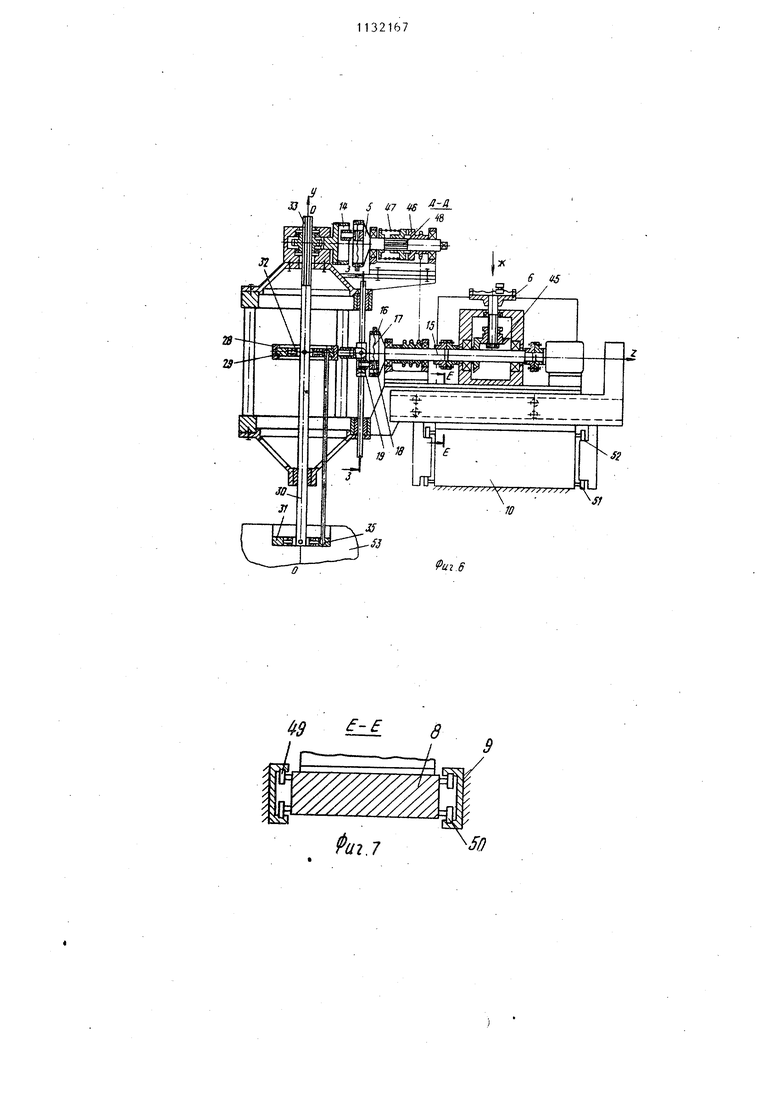
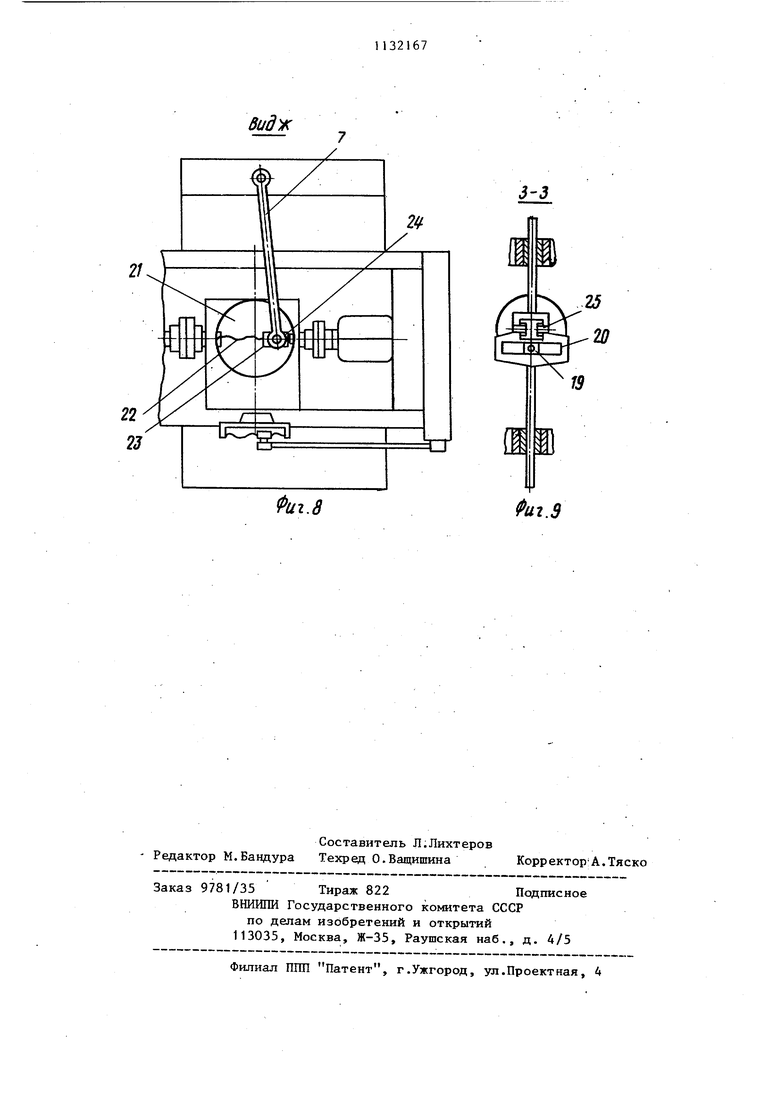
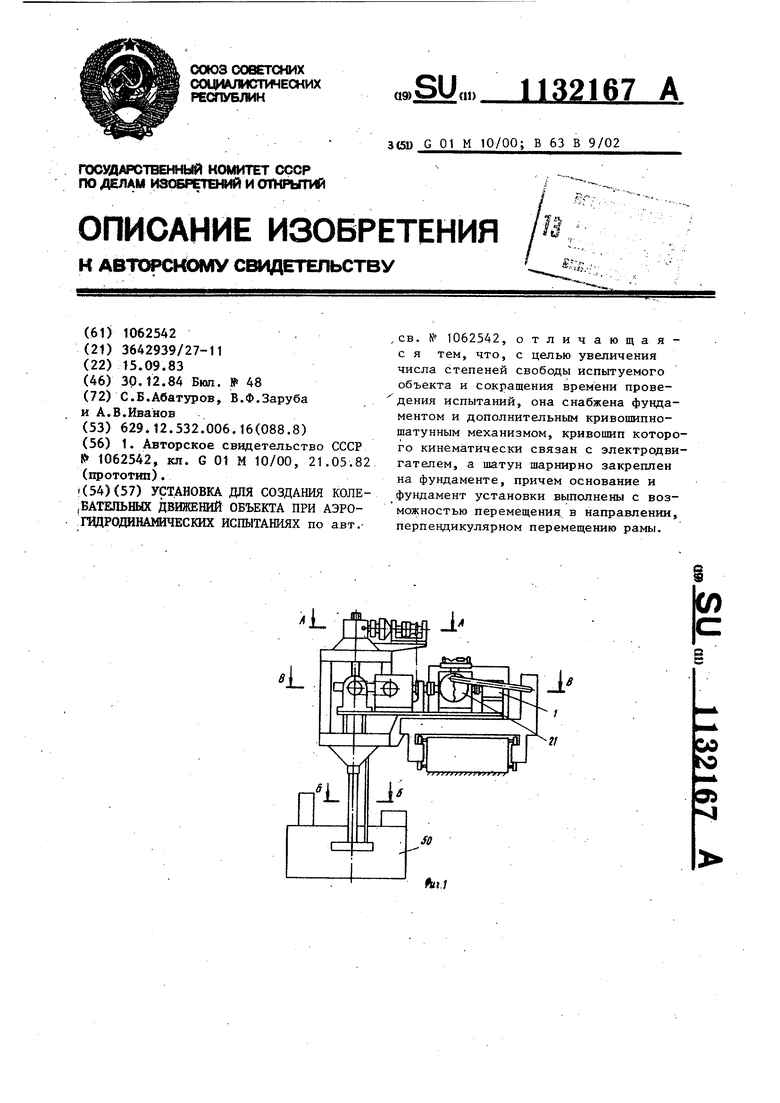
1 . Изобретение относится к техническим средствам экспериментальной гидроаэромеханики, в частности к установкам для создания колебательных движений объекта при получении гидро динамических коэффициентов сил и моментов. По основному авт. св. № 1062542 известна установка для создания коле бательных движений объекта при аэрогидродинамических испытаниях, содержащая кривошипно-шатунный механизм, кривошип которого кинематически связан с электродвигателем, а также раму и основание, причем установка смонтирована на раме с возможностью перемещения относительно основания, а шатун механизма шарнирно закреплен на основании ll . Недостатком такой установки является ограниченность подвижности испытьшаемого объекта (модели) в пространстве (только в пяти степенях свободы) , что ведет к необходимости производить перемонтаж для получения части коэффициентов. Цель изобретения - увелш1ение чис ла степеней свободы испытуемого объекта и сокращение времени проведения испытаний. Поставленная цель достигается тем что установка для создания колеба|тельных движений объекта при аэрогид родинамических испытаниях снабжена фундаментом и дополнительным кривошип но-шатунным механизмом, кривошип которого кинематически связан с электродвигателем, а шатун шарнирно закреплен на фундаменте, причем основание и фувдамент установки выполнены с возможностью перемещения в на правлении, перпендикулярном перемещению рамы. На фиг. 1 изображена предлагаемая установка, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 разрез В-В на фиг.1; на фиг.5 - разрез Г-Г на фиг.4; на фиг.6 - разрез Д-Д на Фиг. 4; на фиг.7 - разрез Е-Е на фиг. 6; на фиг. 8- - вид Ж на фиг. 6; на фиг. 9 - разрез 3-3 на фиг.6. Установка содержит электродвигатель 1, четыре синусных задатчика 2-5 задающего колебательного механизма, исполнительный колебательный механизм, два кривошипно-шатунных механизма, состоящих из кривощипа 6 72 и шатуна 7, раму 8, основание 9 и фундамент 10. Установка смонтирована на основании 9. При этом три синусных задатчика 2, 3 и 4 выполнены с параллельными выходными штоками 11, 12 и 13, а четвертый - с выходным штоком 14, который перпендикулярен первь1м трем. Синусные задатчики 2-5 состоят из валов 15, дисков 16, ходовых винтов 17, гаек 18 и ползунов 19, которые входят в пазы кулис 20 выходных штоков 11 - 14. Кривопмпы 6 состоят из дисков 21, ходовых винтов 22, гаек 23 и ползунов 24. С параллельными выходными штоками 11, 12 и 13 посредством шарниров 25 связаны цилиндрические направляющие 26 исполнительного колебательного механизма, надетые на полуоси 27, закрепленные радиально и в одной плоскости на кольцевой обойме 28. При этом оси двух полуосей 27 соосны, а ось третьей полуоси 27 перпендикулярна первым двум. Внутри обоймы 28 установлена с возможностью поворота платформа 29 в виде диска, выполненная с централ-ьно расположенным отверстием. Выходной вал 30 пропущен через это отверстие. На одном конце выходного вала 30 размещен карданный подвес,31 для крепления испытуемого объекта. Выходной вал 30 связан посредством дополнительного карданного подвеса 32, смонтированного в упомянутом отверстии платформы 29, с последней и расположен параллельно выходным штокам 11, 12 и 13 синусньк задатчиков (внутреннее кольцо карданного подвеса 32 соединено шарнирно с выходным валом ЗОи платформой 29, при этом оси шарниров установлены в одной плоскости и взаимно перпендикулярны друг другу). Два параллельных выходных штока 11 и 12 расположены в плоскости, роходящей через центр платформы 29 перпендикулярной к плоскости, проодящей через центр платформы 29, в ей же находится и третий выходной ток 13, параллельный первым двум токам 11 и 12. Выходной вал 30 устаовлен с возможностью поворота воруг своей оси и перемещения вдоль ее. Другой конец выходного вала 30 вязан посредством шлицевого соедиения 33 через ведомое звено кинемаической цепи, например зубчатой пеедачи 34, с выходным штоком 14 четертого синусного задатчика 5. Плат31форма 29 и наружное кольцо карданного подвеса 31 объекта объединены посредством шарниров 35 с концами двух тяг 36 и 37, параллельных выходному валу 30. Электродвигатель 1 соединен с синусными задатчиками 2 - 5 и кривошипами 6 через редукторы 38 и 39, муфты 40 и 41 цепи 42 и звездочки 43 Редукторы 38 и 39 снабжены устройствами расцепления 44 зубчатых передач 45, обеспечивающими возможность взаимного фазового сдвига синусных задатчиков 2 - 5 и кривошипов 6 кривошипно-шатунных механизмов. Для этой же цели синусный задатчик 5 сое динен с зубчатой муфтой 46, наружная полу муфта которой поджата пр окиной 47 и выполнена с-возможностью скольжения по валу 15 с помош1ью шпицевого соединения 48. Рама 8 и основание 9 вьшолнены с возможностью относительного перемещения, для чего в раме 8 установлены ролики 49, а основание снабжено направляющими.50. Основание 9 и фундамент 10 также вьшолнены с возможностью относительного перемещения в направлении, перпендикулярном относительному перемещению рамы 8 и ocHOBaifflH 9, для чего в фундаменте 10 установлены ролики 51, а основание 9 снабжено направляющими 52, перпендикулярными направляющим 50, Кривошип 6 одного кривошипно-шатунного механизма шарнирно соединен с основанием 9, причем ось кривошипа 6 в нейтральном положении установлена параллельно направляющим 50 основания 9, а кривошип 6 другого кривошипно-шатунного механи ма шарнирно соединен с фундаментом 10. Ось кривошипа 6 в нейтральном положении установлена параллель но направляющим 52 основания 9. Объект (модель) 53 крепится к вы ходному валу 30 через карданньш под вес 31. Работа предлагаемой установки пр исходит следующим образом. Синусные задатчики приводятся во вращение электродвигателем 1. Для создания колебаний объекта 53 относительно оси X ползуны 19 синусных задатчиков 2, 3 и 5, а-также позлуны 24 устанавливаются в середине дисков 16 и 21 с помощью ходовьгх вин тов 17 и 22, а амплитуда колебаний регулируется перемещением ползуна 19 синусного задатчика 4. При вращении 74 синусного задатчика 4 его выходной шток 13 будет колебаться в плоскости Y2, передавая колебания платформе 29, и далее через тягу 37 объекту 53. Для создания колебаний объекта 53 относительно оси 2 ползуны 19 -задатчиков 4 и 5, а также ползуны 24 устаг навливаются в сер.едине дисков 16 и 21, а амп,литуда колебаний регулируется равным по величине и противоположным по направлению перемещением ползунов 19 от центра дисков 16 синусных задатчиков 2 и 3..При вращении синусных задатчиков 2 и 3 выходные штоки 11 и 12 будут колебаться в плоскости XY в противофазе, передавая свои колебания платформе 29, и далее ерез тягу 36 объекту 53. Для создания колебания объекта 53 относительно оси Y ползуны 19 задат.чипов 2, 3 и 4, а также ползуны 24 устанавливаются в середине дисков 16 и 21, а амплитуда колебаний регулируется перемещением ползуна 19 синусного задатчика 5. При вращении.синусного задатчика 5 его выходной штэк 14 будет колебаться в плоскости YZ , передавая через зубчатую передачу 34 и шлицевое соединение 33 свои колебания платформе 29, и далее через обе тяги 36, 37 и выходной вал 30 объекту 53, Для создания возвратно-поступательного движения объекта 53 вдоль оси У ползун 19 синусного задатчика 5, а также ползун 24 устанавливаются в серединах дисков 16 и 21, а амплитуда колебаний, регулируется равными перемещениями ползунов 19 синусных задатчиков 2, 3 и 4 в одну сторону. При вращении синусных задатчиков 2, 3 и 4 их выходные штоки 11,12 и 13 будут колебаться в плоскостях XY и VZ синфазно, передавая свои колебания платформе 29, и далее через выходной вал 30 и обе тяги 36, 37 объекту 53. Для создания возвратно-поступательного движения объекта 53 вдоль оси 2 ползуны 19 синусных задатчиков 2 - 5, а также ползун 24 кривошипа 6, кинематически связанного с фундаментом 10, устанавливаются в серединах дисков 16 и 21, а амплитуда колебаний регулируется перемещением ползуна 24 кривошипа 6, кинематически связанного с основанием 9. При вращении этого кривошипа объект
53 (вместе со всей установкой, кроме основания 9) будет колебаться в плоскости 4Z.
Для создания возвратно-поступательного движения объекта 53 вдоЛь оси X ползуны 19 синусных задатчиков 2, 3 и 5, а также ползун 24 кривошипа 6, кинематически связанного с основанием 9, устанавливаются в серединах дисков 16 и 21, а амплитуда колебаний регулируется перемещением ползуна 24 кривошипа 6, кинемааанчески связанного с фундаментом 10. При вращении этого кривошипа объект 53 (вместе со всей установкой) будет колебаться в плоскости X2.
При одновременной работе всех задатчиков совместно с кривошипно-шатунными механизмами и установке в них ползунов 19 и 24 на различных расстояниях от центров дисков 16 и 21 объект 53 будет совершать сложное пространственное движение, параметры которого задаются перемещениями ползунов 19 и 24 относительно центров дисков 16 и 21, а также осуществлением определенньгх сдвигов по фазе синусных задатчиков 2 - 5 и кривошипов 6.
Применение предлагаемой установки позволяет увеличить число степеней свободы испытуемого объекта до шести и сократить время проведения испытаний .
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1981 |
|
SU981078A1 |
| Волнопродуктор Абатурова С.В. и Зарубы В.Ф. | 1982 |
|
SU1051400A1 |
| Установка для раскачивания моделей судов при имитации качки на волнении | 1975 |
|
SU552234A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| Устройство для определения положения ползуна кривошипно-шатунного механизма | 1989 |
|
SU1753257A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Устройство для вычерчивания гармонических кривых | 1980 |
|
SU878605A1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ К РАБОЧЕМУ ВАЛУ ОТ ЦИЛИНДРА В ТЯГОВЫХ ПОРШНЕВЫХ МАШИНАХ | 1933 |
|
SU50232A1 |
-/}
S-6
UI.Z
Раг.5
dJ
л
ff
-E
8
5f)
дидж
3-3
Фиг.8
Фиг.Э
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| | | |||
