Изобретение относится к судостроению, а именно к движителям надводных и подводных судов. Оно может быть также использовано в качестве вибрационного конвейера, а также в качестве наглядного пособия волнового движения.
Известно приводное устройство движителя лодок, содержащее двигатель с выходным валом и коробкой передач, кинематически связанной посредством силового механизма с вертикальной гибкой пластиной, и парные рычаги с лопастями, связанные с неподвижными обоймами (Патент Японии N 22887, 84E5, опубл. 1970).
Недостатком указанного устройства является низкая тяга движителя и устойчивости лодки при движении.
Известен движитель судна, содержащий две лопасти с приводом, включающим рычажный механизм, содержащий рычаги со сферическими шарнирами, а также эксцентрик, связанный с маятниковым рычагом и кривошипом, взаимодействующими посредством зубчатых передач с вертикальной гибкой лопастью (Авторское свидетельство СССР N 941239, В 63 H 1/04, 1979).
Недостатком известного движителя судна является низкая тяга, связанная с тем, что вследствие постоянства положения осей закрепления вертикальной гибкой лопасти, она может совершать движение либо по типу стоячей волны, либо по типу бегущей волны на ограниченных участках с переменной формой волны.
Прототипом заявляемого изобретения является движитель судна, содержащий раму, на которой закреплена по крайней мере одна жесткая или упругая лопасть, соединенная с приводом ее угловых колебаний относительно оси, лежащей на ее поверхности, включающим в себя рычажное устройство (НРБ, а.с. 38987, кл. В 63 Н 1/36, 1983).
Недостатком прототипа является низкая тяга движителя, связанная с недостаточно точным копированием движения волны и большими потерями энергии на бесполезное перемешивание воды.
В основу настоящего изобретения положено решение технической задачи повышения тяги движителя.
Технический результат достигается за счет того, что рычажный механизм содержит два кривошипно-ползунных синусных механизма, состоящих в кинематической связи с передаточным отношением, равным 1, и смещением по фазе, и поступательную пару, содержащую ползун с неподвижной направляющей, причем ползуны синусных механизмов, состоящих в кинематической связи с передаточным отношением, равным 1, и смещением по фазе, и поступательную пару, содержащую ползун с неподвижной направляющей, причем ползуны синусных механизмов и поступательной пары соединены общим шатуном.
Сущность изобретения поясняется чертежами, где на
фиг. 1 - принципиальная схема движителя судна;
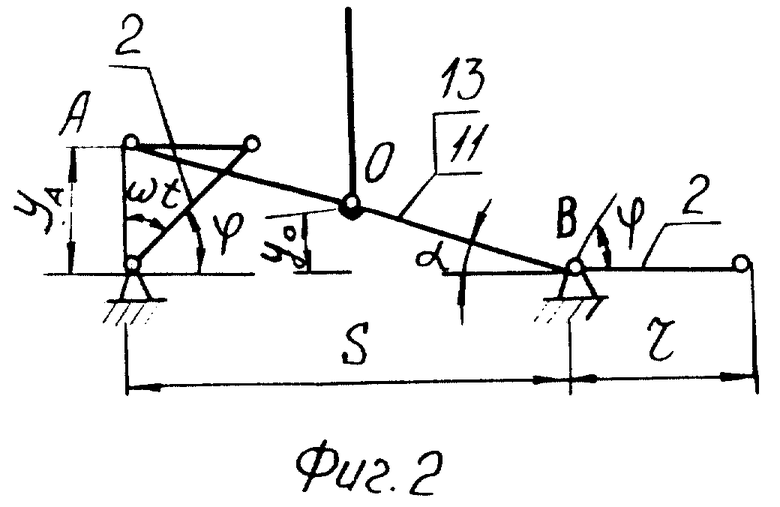
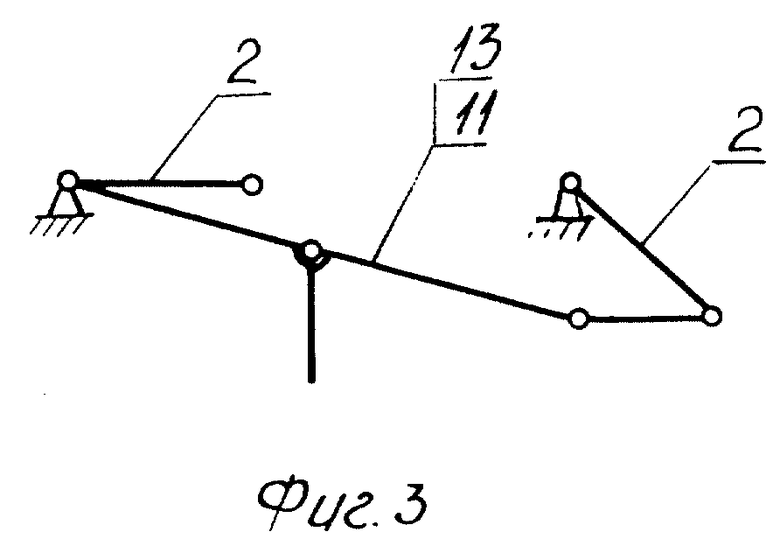
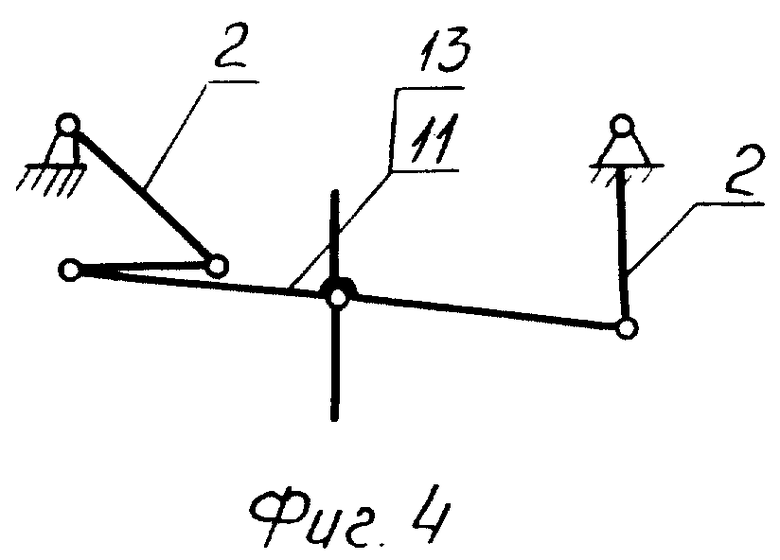
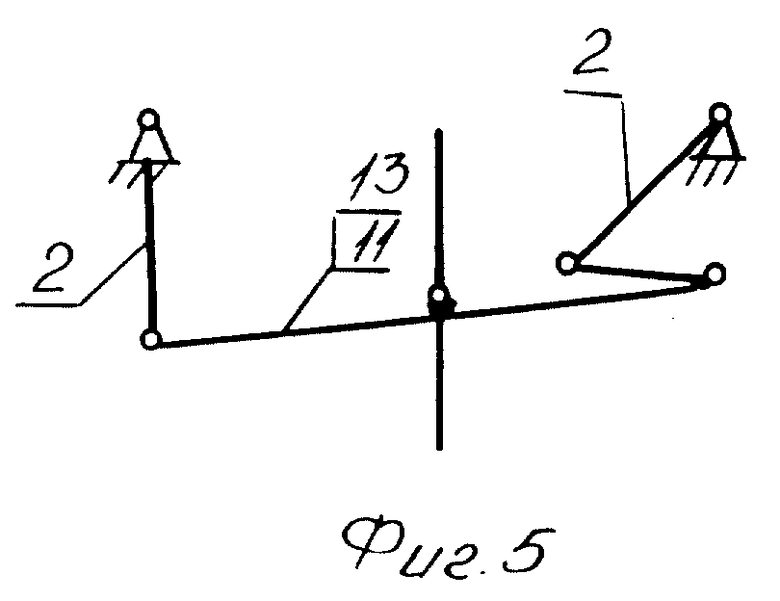
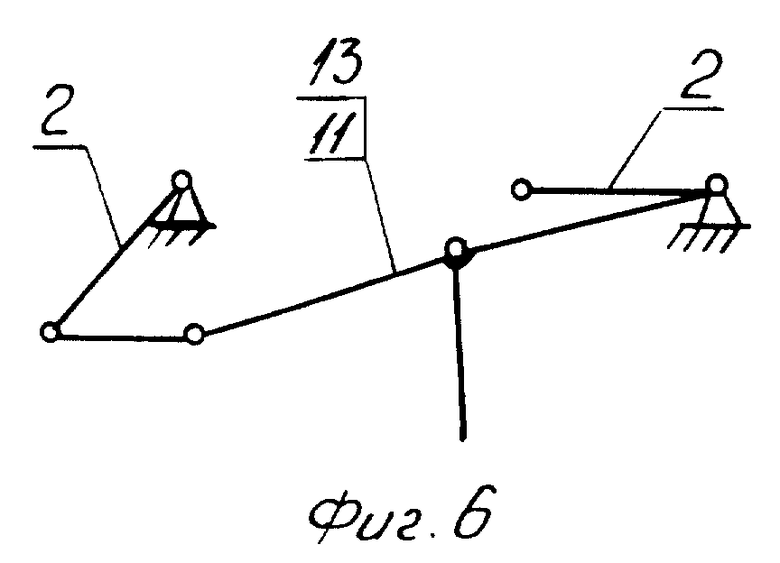
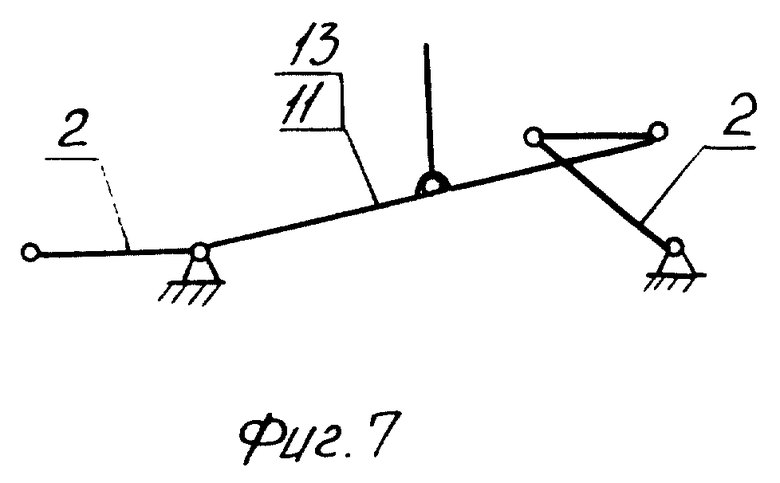
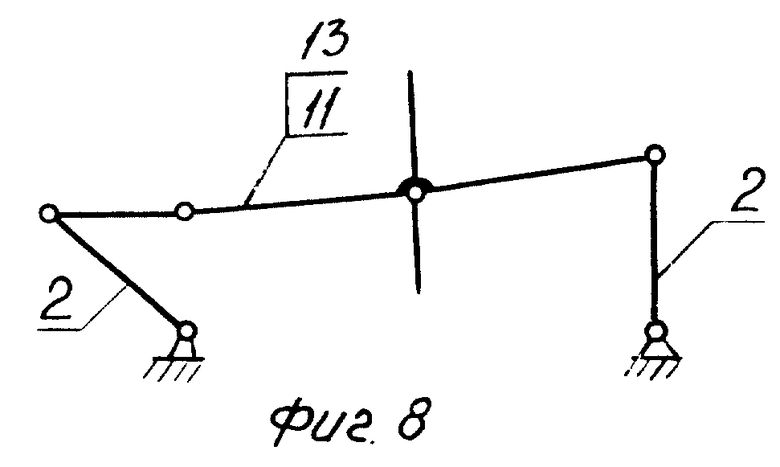
фиг. 2-8 - последовательные положения общего шатуна 11 и лопасти 13, отличающиеся поворотом кривошипов 2 на 45o при смещении кривошипов 2 по фазе на 45o;
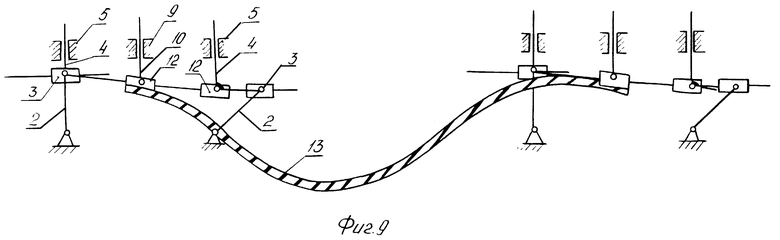
фиг. 9 - принципиальная схема движителя судна с двумя рычажными механизмами и упругой лопастью, закрепленной на концах на разных механизмах;
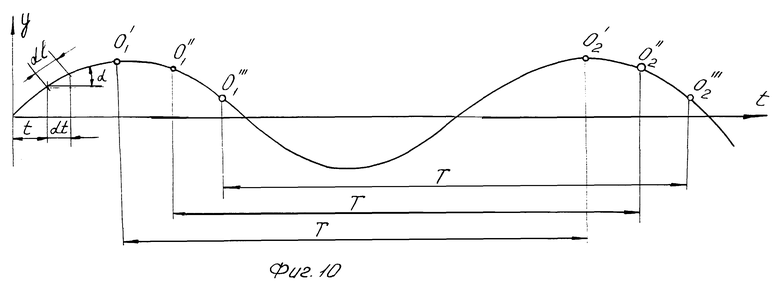
фиг. 10 - изменение формы упругой лопасти между закреплениями на разных механизмах при работе движителя судна.
Движитель судна содержит раму 1, на которой смонтированы два кривошипно-ползунных синусных механизма, каждый из которых состоит из кривошипов 2, взаимодействующих через шатуны 3 с ползунами 4, установленными в направляющих 5. Направляющие 5 ползунов 4 параллельны друг другу. Ползуны 4 состоят друг с другом в кинематической связи с передаточным отношением, равным 1, и смещены относительно друг друга по фазе. Кинематическая связь ползунов 4 может быть осуществлена посредством последовательно соединенных трех шестерен 6-8, расположенных в ряд, к крайним из которых 6, 8 присоединены кривошипы 2 кривошипно-ползунных синусных механизмов.
Между направляющими 5 синусных механизмов расположена неподвижная направляющая 9, параллельная направляющим 5 синусных механизмов и, преимущественно, делящая расстояние между ними пополам. Неподвижная направляющая 9 образует поступательную пару с ползуном 10. Ползуны 4 синусных механизмов и ползуны 10 поступательной пары соединены общим шатуном 11, соединенным с двумя любыми из этих трех ползунов 4 или 10 посредством промежуточных звеньев 12, образующих с ползунами 4 или 10 вращательные пары и с общим шатуном 11 - поступательную. С третьим ползуном (на фиг. 1-8 - левый 4) общий шатун 11 соединен посредством вращательной пары. К общему шатуну 11 или к промежуточному звену 12 присоединена лопасть 13, ориентированная вдоль общего шатуна 11 и расположенная посредине между направляющими 4 синусных механизмов.
Привод движителя судна может содержать дополнительный рычажный механизм, идентичный первому и имеющий одинаковые с ним начальные параметры, а упругая лопасть 13 закреплена на общих шатунах 11 или промежуточных звеньях 12 обоих рычажных механизмов. Длина лопасти 13 в этом случае должна быть больше расстояния между местами закрепления лопасти и иметь вследствие этого изогнутую форму. Длина лопасти 13 может быть определена из следующих соотношений (см. фиг. 10)
где tg α = y'.
При y = a•Sin (kt)
Движитель судна работает следующим образом. При вращении кривошипов 2 шатуны 3 синусных механизмов сообщают ползунам 4 возвратно-поступательное движение с одинаковыми периодами и смещением по фазе. При этом общий шатун 11 вместе с ползунами 4 приобретает на своих концах (т. т. А и Б) движение вдоль направляющих 5 со скоростью, подчиняющейся синусоидальному закону, но смещением по фазе на угол ϕ (обозначения см. фиг. 2):
В этом случае вертикальное перемещение середины общего шатуна 11 и его угол наклона α могут быть определены из зависимостей
или после тригонометрических преобразований
Поскольку функции cos(-ϕ/2) и sin(-ϕ/2) имеют характер изменения, при котором максимум одной из них сопровождается нулевым значением другой, оптимальным значением можно принять ϕ/2 = 45o, при котором cos (-ϕ/2) = sin(-ϕ/2) = 0,707 или ϕ = 90o.
В этом случае
Соотношение между r и s может быть выбрано любым, в зависимости от него характер изменения наклона лопасти 13 будет более плавным или крутым. Для получения движения лопасти по закону синуса с амплитудным перемещением y0 необходимо, чтобы соблюдалось условие
Из (1) имеем
Подставляя (3) в (2), находим s = y0.
С учетом этого центральная часть общего шатуна 11 совершает синусоидальное движение по типу волнообразно движущихся водных обитателей и передает это движение соединенной с ним непосредственно или посредством промежуточного звена 12 лопасти 13.
Сопровождающий работу движителя судна поворот общего шатуна 11 вызывает изменение его длины между ползунами 4 и 10, определяемой как s/2cos α для соседних ползунов 4 и 10 и s/cos α для крайних 4. Соединение общего шатуна 11 с двумя ползунами 4 или 10 посредством промежуточных звеньев 12, образующих с этими ползунами вращательные пары, а с общим шатуном 11 - поступательную, позволяет общему шатуну 11 свободно проскальзывать вдоль промежуточных звеньев 12 и тем самым компенсировать изменение требуемой длины общего шатуна 11 между ползунами 4 и 10 в результате вращения кривошипов 2. Соединение общего шатуна 11 с третьим ползуном 4 или 10 посредством вращательной пары удерживает его от беспрепятственного продольного смещения, т.е. устраняет его лишнюю степень свободы в механизме.
Присоединение лопасти 13 к общему шатуну 11 с ориентацией вдоль него позволяет придать ей волнообразное движение, а расположение ее посредине между направляющими 4 синусных механизмов, как показано выше, позволяет обеспечить ее синусоидальное волнообразное движение. Присоединение лопасти 13 к общему шатуну 11 посредством промежуточного эвена 12 позволяет допасти 13 располагаться строго посредине между ползунами 4 независимо от продольных смещений общего шатуна 11 в случае его соединения вращательной парой с ползуном 4. Промежуточное звено 12, соединенное с общим шарниром 11 поступательной парой и имеющее вследствие этого угол наклона, равный углу наклона α общего шатуна 11, позволяет обеспечить такой же угол наклона и жестко соединенной с промежуточным звеном 12 лопасти 13. В случае соединения общего шатуна 11 вращательной парой с ползуном 10 наличие промежуточного звена 12 необязательно. Неподвижная направляющая 9, образующая поступательную пару с ползуном 10, обеспечивает постоянное расположение лопасти 13 вместе с промежуточным звеном 12 посредине между направляющими 4.
В движителе судна с упругой лопастью 13, соединенной своими краями с двумя рычажными механизмами, лопасть 13 при вращении кривошипов 2 изгибается, постоянно сохраняя форму синусоидальной бегущей волны, что позволяет иметь более плавный характер взаимодействия исполнительного органа с жидкой средой и, как следствие, более высокие тяговые характеристики движителя.
Использование предлагаемого движителя судна позволяет повысить тягу движителя за счет придания исполнительному органу движителя судна волнообразного движения по типу бегущей волны с постоянными параметрами, копируя движение водных обитателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ СУДНА | 2000 |
|
RU2183577C2 |
| ДВИЖИТЕЛЬ СУДНА | 2005 |
|
RU2285634C1 |
| ДВИЖИТЕЛЬ С ГИДРОПРИВОДОМ | 2023 |
|
RU2817445C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| ПРИВОД ГЛАВНОГО ДВИЖЕНИЯ ПОПЕРЕЧНО-СТРОГАЛЬНОГО СТАНКА | 1994 |
|
RU2074055C1 |
| МЕХАНИЗМ С ВЫСТОЯМИ ВЫХОДНОГО ЗВЕНА | 2002 |
|
RU2229047C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
Изобретение относится к судостроению, а именно к движителям надводных и подводных судов. Движитель судна содержит раму, на которой смонтированы два кривошипно-ползунных синусных механизма с параллельными направляющими. Ползуны состоят друг с другом в кинематической связи с передаточным отношением и смещены относительно друг друга по фазе. Между направляющими синусных механизмов расположена параллельная направляющим неподвижная направляющая, делящая расстояние между ними пополам. Неподвижная направляющая образует поступательную пару с ползуном. Ползуны синусных механизмов и ползуны поступательной пары соединены общим шатуном, соединенным с двумя любыми из этих трех ползунов посредством промежуточных звеньев, образующих с ползунами вращательные пары и с общим шатуном поступательную. С третьим ползуном общий шатун соединен посредством вращательной пары. К общему шатуну или к промежуточному звену присоединена лопасть, ориентированная вдоль общего шатуна. При вращении кривошипов шатуны синусных механизмов сообщают ползунам возвратно-поступательное движение с одинаковыми периодами и смещением по фазе. При этом центральная часть общего шатуна совершает синусоидальное движение по типу волнообразно движущихся водных обитателей и передает это движение соединенной с ним непосредственно или посредством промежуточного звена лопасти. Достигается повышение тяги движителя. 3 з.п.ф-лы, 10 ил.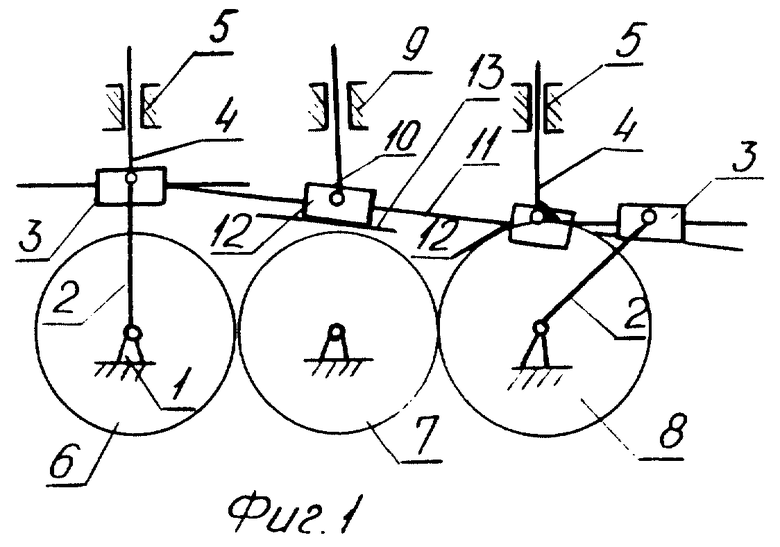
| Устройство для передачи давления на рабочий орган | 1926 |
|
SU38987A1 |
| Приводное устройство движителя для лодок | 1979 |
|
SU941239A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Ударный гайковерт | 1981 |
|
SU1033304A2 |
