(54) ЭЖКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором (его варианты) | 1980 |
|
SU1100699A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Электропривод с асинхронной машиной с фазным ротором | 1977 |
|
SU1100703A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
|.
Изобретение относится к электро технике и может быть использовано для регулирования скорости нагрузки с регулированием cos Ч .
Известный электропривод с синхронным двигателем, решающий аналогичную задачу, содержит регуляторы составляющих тока статора по продольной и поперечной осям, блок преобразования фазных токов статора в составляющие тока статора по упойя,нутым ОСЯМ; и блок нелинвйностей р J.
В этом электроприводе регулировав ние costfобеспечивается подключеНи ем блока нелинейностейiко входам регуляторов составляющих тока статора по продольной и поперечной осям и ведется по разомкнутому контуру Точность регулирования GOS опрёде ляется точностью работы блока нёлйтнейнострй, который является достаточно сложным.
Недостатками данного устройства являются его сложность и бравнитель,но невысокая точность регулирования cosM.
Наиболее близким к изобретению является электропривод с синхронным двигателем, статорные обмотки которого связаны с регулятором скорости через последовательно включенные многофазный регулируемый источник тока, координатный преобразователь и блок вычисления составляющих токов
10 статораи ротора, один выход которого связан со входом однофазного регулируемого источника тока, подключенного к обмотке ротора, причем датчик углового положения ротора
15 подключен к координатному преобразователю и электронной модели синхрон,ного двигателя, со входами которой связаны датчики токов статора и ротора. Кроме тОго, электропривод со20держит тахогенератор t2.
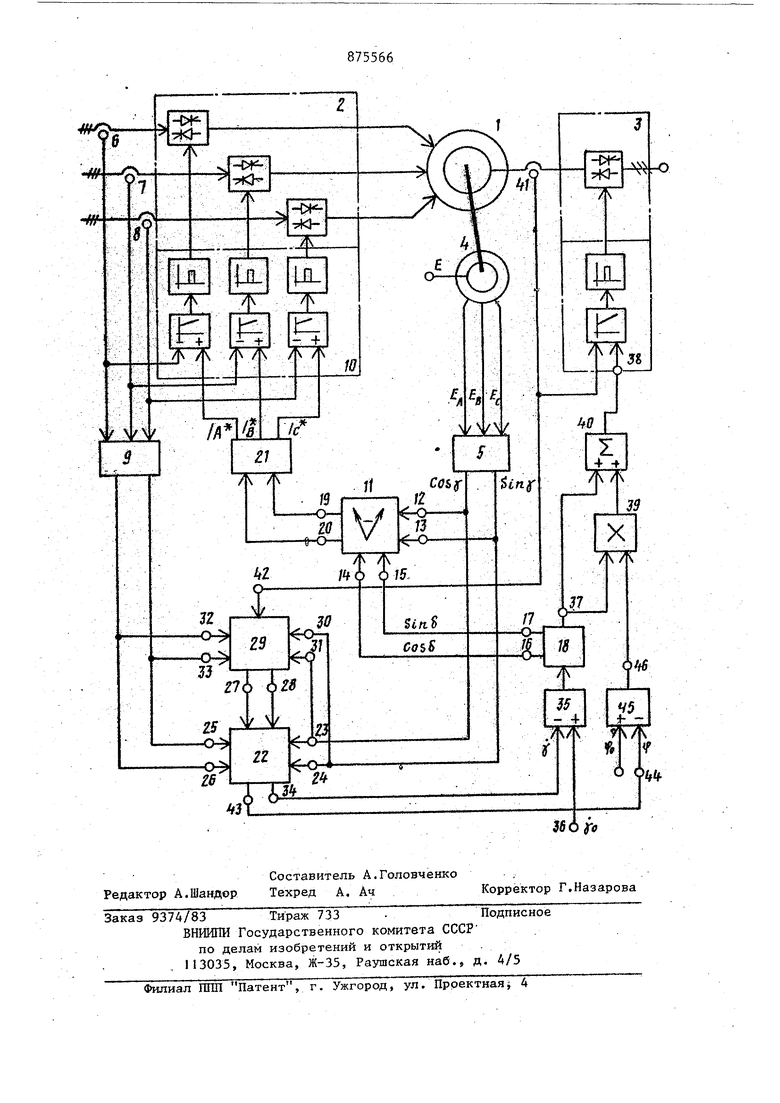
Однако необходимость применения достаточно сложного блока вьписления составляющих токов статора и - отора, а также установка на валу двигателя тахогенератора -определяют сложность известного устройства в целом. Цель изобретения - упрощение элек тропривода. Указанная цель достигается тем, что электропривод с синхронным двигателем, статорные обмотки которого связаны с регулятором скорости через последовательно включенные мно гофазный регулируе мый источник тока, координатный преобразователь, блок вычисления составляющих токов статора и ротора, один выход кото-;- . рого связан со входом однофазного регулируемого источника тока , подклю ченного к обмотке ротора, датчик углового положения ротора подключен к координатному преобразователю и элек тронной модели синхронного двигателя, со. входами которой связаны датчи ки токой статора и ротора, снабжен регулятором фазы тока статора, а эле тронная модель синхронного двигателя составлена из формирователя фазных напряжений статора иопределителя скорости ротора и фазы тока статора, один выход которого через регулятор фазы тока статора связан со входом однофазного регулируемого источника тока, а другой выход подключен ко вх ду регулятора скорости, при этом его входы связаны с датчиками токов статора и.ротора и с датчиком углового положения ротора. . На чертеже приведена блок-схема электропривода. , Электропривод содержит синхронный электродвигатель 1, подключенньш к трехфазному регулируемому.источнику 2 тока. Обмотка возбуждения двига теля подключена к однофазному регули руемому источнику 3 тока. Датчик 4 у лового положения ротора, находящийся на валу двигателя, подключен к формирователю 5 опорных сигнгшов. Датчики 6, 7 и 8 токов фаз статора по ключены к преобразователю 9 числа фа и к регуляторам 10 токов фаз статора Преобразователь 11 координат подключ двумя входами 12 и 13 к формирователю 5, а двумя другими входами 14 и 15 к выходам 16 и 17 вычислителя I8 составляющих токов статора и ротора. Выходы 19 и 20 преобразователя 11 координат через преобразователь 21 числа фаз подключены ко входам регуляторов 10 токов фаз .статора. 6 Определитель 22 скорости ротора и фазы тока статора подсоединен входами 23 и 24 к выходам формирователя 5 опорных сигналов, входами 25 и 26 к выходу- преобразователя 9 числа фаз, входами 27 и 28 к формирователю 29 фазных напряжений статора. Входы 30 и 31 формирователя 29 подключены к выходам формирователя 5 опорных сигналов, входы 32 и 33 - к выходам преобразователя 9 числа фаз. Выход 34 определителя 22 подключен ко входу регулятора 35 скорости, к другому входу которого подключен задатчик 36 скорости. Выход 37 подключен ко входу 38 регулятора однофазного источника 3 тока через последовательно включенные блок 39 умножения и сумматор 40 и непосредственно через сумматор 40. Датчик 41 тока ротора соединен со входом 42 формирователя 29 фазных напряжений статора. Выход 43 ;определителя 22 подключен ко входу . 44 регулятора 45 фазы тока статора, выход 46 которого связан со входом 38 через блок 39 умножения и сумматор 40. Электропривод работает следующим образом. .. Сигнал задания скорости поступает от задатчика 36 скорости на вход регулятора 35 скорости, на другой вход которого поступает сигнал , пропорциональный фактической скорости вращения ротора электродвигателя 1. Сигнал/реформируется в определителе 22 скорости и фазы тока статора. Сигнал рассогласования скоростей Jf - усиливается регулятором 35 скорости и поступает на вход вычислителя 18 составляющих тока статора и ротора, в котором обеспечива- ются такие линейные зависимости сигналов от усиленного сигнала рассогласования скоростей, то сигналы на выходах 16 и 17 обеспечивают на- , перед заданную фазу токов статора, образующих результирующий вектор магнитного поля статора, опережа«эщий вектор магнитного поля обмотки возбувденйя ла угол сГ 90 эл.град. На выходе .37 образуется сигнал, пропорциональный усиленному сигналу рассогласования скоростей, не зависящий от знака этого сигнале, поступающий на вход 38 регулятор однофазного источника тока через блок 39 умножения и сумматор 40.
При взаимодействии сигналов, содержащих информацию об угловом положе НИИ ротора, и поступа19щих на входы 12 и 13 преобразователя 11 координат и сигналов, задающих фазовый сдвиг и амплитуду статорнык токов, поступакнцих на входы 14 и 15, образуется ортогональная пара сигналов на выходах 19 и 20, определяющая компоненты статорного тока, отображаемые в прямоугольных координатах. Из полученной пары сигналов в преобразователе 21 числа фаз трехфазньй сигнал, поступающий на входы регуляторов 10 фазных токов.
На входы 30 и 31 формирователя 29 поступают сигналы, содержащие информацию об угловом положении ротора, на входы 32 и 33 поступают сигналы, содержащие информацию о токах статора, на вход 42 поступает сигнал,, пропорциональный току обмотки возбуждения. На выходах 27 и 28 формируются сигналы, пропорциональные фазным напряжениям, отображенные в прямоугольных координатах. Полученные сигналы поступают на входы определителя 22 скорости ротора и фазы тока статора, на другие два входа 25 и 26 поступают сигналы, отображакяцие ТОКИ статора. Обе упомянутые пары модулируются высокой частотой и суммируются попарно. Полученные два сигнала модулированы по частоте ( фазе). В результате сравнения фазы сигнала, отображайтего фазные токи статора с фазой сигнала, отображающего фазные напряжения, на выходе 43 формируется сигнйл, пропорциональный фазовому сдвигу тока статора относительно напряжения, который поступает на вход регулятора 45 фазы. На другой вход регулятора 45 поступает сигнал Q от задатчи а фазы. Усиленный сигнал рассогласов.ания с выхода регулятора 45 блок 39 умножения и сумматор 40 поступает на вход регулятора тока 33. Действие этого,сигнала ,сводится к тому, что при переходах на другой режим работы двигателя полученные рассогласования фазы тока статора относительно напряжения компенсируются путем коррекции ве 1Ичины тока обмотки возбуждения.
Благодаря раздельному регулированию электродвигателя и фазового сдвига тока статора относительно напряжения отпадает необходимость применения блоков нелинейности в вычислителе, обеспечивается постоянство потокосцепления статора и значение cos Ч близкое к единице при регулировании скорости и изменении момента.нагрузки, что позволяет упростить схему электропривода в Целом.
Все узлы, преобразующие сигналы, можно выполнить на интегральных микросхемах, что обеспечит высокую надежность и экономичность электропривода.
Формула изобретения
15
Элев:тропривод, содержащий синхронный электродвигатель, статорные обмотки которого связаны с регулятором
0 скорости через последовательно включенные многофазный регулируемый источник тока, координатный преобразователь и блок вычисления составляющих токов статора и ротора, один выход
5 которого связан со входом однофазного регулируемого источника тока, подключенного к обмотке ротора, датчик углового положения ротора подключен к координатному преобразователю и
0 электронной модели синхронного электродвигателя, со входами которой связаны датчики токов статора и ротора, отличающийся тем, что, с целью упрощения он снабжен регулятором фазы тока статора-, а электронная модель синхронного электродвигателя составлена из формирователя фазных напряжений статора и определителя скорости ротора и фазы тока ста тора, один выход которого через ре0гулятор фазы тока статора связан со входом однофазного регулируемого источника тока, а другой выход подключен ко входу регулятора скорости, причем его входы связаны с дат5чиками токов статора, с датчиком углового положения ротора и с выходами формирователя фазных напряжений статора, входы которого связаны с датчиками токов статора и ротора и
0 с датчиком углового положения ротора.
Источники информации, принятые во внимание при экспертизе 5 I. Авторское свидетельство СССР № 520682, кл. Н 02 Р 5/40, 1974.
