ю оо ю
4
2. Устройство по П.1, отличающееся тем, что блок сравнения содержит два последовательно соединенных резистора, причем к сво6одногу у зажиму первого резистора подключены блок задания и второй блок распознавания дефекта, к точке соединения резисторов подключен регулятор скорости, а свободншЧ зажим второго резистора подключен к первому блоку распознавания дефекта, содержащему компаратор, резистор, элемент НЕ-ИЛИ, блок короткого замыкания, причем один вход компаратора соединен с тахогенератором, а к другому подключен резистор, выход компаратора соединен с одним входом элемента НЕ-ИЛИ, другой вход которого соединен с одним из выходов блока короткого замыкания, другие выходьз которого соединены соответственно с регуляторами скорости и тока выход элегдента НЕ-ИЛИ соединен с со.гласующим блоком.
3„ Устройство по П.1, отличающееся тем, что второй бл распознавания дефекта содержит диф|ференциатор заданного значения скорости, блок ограничения, cxeMij И, ИЛИ и два компаратора, причем вход одного из компараторов соединен с регулятором скорости, а выход - с рдйим из входов схемы ИЛИ и с выходом второго компаратора, вход которого через дифференциатор з,сданного значения скорости соединен с блоком сравнения, второй вход схемы ИЛИ
i соединен с блоком ограниче ния.
4. Устройство ПОП.1, отличающееся тем, что согласующий блок содержит последовательно соединенные схему ИЛИ и элемент задержки , причем входы схемы ИЛИ являются входами, а выход элемента задержки - выходом согласующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОБРЫВА ЦЕПИ ТАХОГЕНЕРАТОРА | 1996 |
|
RU2126162C1 |
| Устройство для защиты электродвигателя постоянного тока | 1985 |
|
SU1297155A1 |
| Устройство для управления скоростным режимом подъемной установки | 1975 |
|
SU546551A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Электропривод постоянного тока | 1983 |
|
SU1117808A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Электропривод постоянного тока | 1990 |
|
SU1774451A2 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
1. УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ. АВАРИЙ В ПРИВОДАХ ПОСТОЯННОГО ТОКА С РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ, содержагдее блок задания, блок сравнения, регулятор скорости и регулятор тока, выход которого через блок управления соединен с исполнительным органом, предназначенныг ддтя включения в цепь якоря электродвигателя, тахоганератор, выход которого соедине} с блоком сравнения и с блоком распознавания дефекта, отличающееся тем, что. в него дополнительно введены второй блок разпознавания дефектов и два согласующих блока, причем вьаходы первого блока распознавания ieфeктa соединены соответственно с регулятором скорости, регулятором тока и через согласующий блок с блоком управления, выходы второго блока распознавания дефектов соединены с регулятором тока и через второй согласующий блок с блоком управления, а вхо§ ды второго блока распознавания дефекта соединены с блоком сравнения W и с регулятором скорости.
Изобретение относится к электротехнике и может быть применено для Д1-1на.мических высококачественных приводов постоянного тока с регулированием скорости вращения, которые допускают высокую перегрузку по то ку. Известны высокодинамические приводы постоян-ного тока с регулированием скорости вращения, имеющие 4--8 кратну1о перегрузочную способнос по моменту для достигкения необходимой динамики. Эта необходимая перегрузочная способность по моменту и вследствие наличия пи-регуляторов в контуре регулирования при ошибочном обслуживании может привести к поврезадению машины. В стационарном режиме реботы так же могут возникнуть броски тока, на пример, при недопустимых изменениях нагрузки. Наиболее близким техническим решением к изобретению является уст ройство для защиты от аварий в приводах постоянного тока, содержащее блок зггдания, блок сравнения, регу ляторы скорости и тока, выход которого через блок управления соединен с исполнительным органом, предназна ченным для включения в цепь якоря электродвигателя, тахогенератор, которого соединен с блоком сравнения и с блоком распознавания дефектоз., Недостатком известного устройства является то, что, обеспечивая необходиму о защитную функцию, оно одновременно препятствует требуемой динамике привода. Недостатками этого устройства являются также высокие затраты на конструктивные детали и применение двух дополнительных специальных источников напряжения. Цель изобретения - повышение надежности Бысокодинамических приводов постоянного тока с регулированием скорости вращения ПИ-регуляторами, снижение схемных затрат и защита от повре).ний рабочей машины, связанной с приводом. Поставлешная цель достигается тем, что в устройство для защиты ОТ аварий в приводах постоянного тока с регулированием скорости вращения, содержащее блок задания, блок сравнения, регулятор скорости и регулятор тока, выход которого через блок управления соединен с . исполнительным органом, предназначенным для включения в цепь якоря электродвигателя, тахогенератор, выход которого соединен с блоком сравнения и с блоком распознавания дефектов, дополнительно введены второй .блок распознавания дефектов и два ; согласующих блока, причем выходы первого блока распознавания дефекта соединены соответственно с регулятором скорости, регулятором тока и через согласующий блок с блоком управления, выходы второго блока распознавания дефектов соединены с регулятором тока и через второй согласующий блок с блоком управления, а входы второго блока распознавания дефекта соеди 1е ы с блоком сравнения и с регулятором скорости.
Кроме того, устройство для защиты от аварий в приводах постоянного тока содержит два последователь ЕЮ соединенных резистора, причем к свободному зажиму первого резистора подклш чей блок задания и второй блок распознавания дефекта, к точке соединения резисторов подключен регулятор скорости, а свобод 1ый зажим второго резистора подключен к первому блоку распознавания дефекта, содержащему компаратор, резистор, элемент НЕ-ИЛИ блок короткого замыкания, причем один вход компаратора соединен с тахогенератором, а к другог у подключен резистор, выход компаратора соединен с одним входом элемента НЕ-ИЛИ другой вход которого соединен с одним из выходов блока короткого замыкания, другие выходы которого соединены соответственно с регуляторами скорости и тока, выход элемента НЕ-ИЛИ соединен с согласу}ощим блоком
Устройство для защиты от аварий в приводах постоянного тока содержит также второй блок распознавания дефектов, включающий дифференциатор заданного значения скорости, блок .ограничения, схемы И, ИЛИ и два компаратора, причем вход одного из компараторов соединен с регулятором скорости, а выход - с одним из входов схеглы И, второй вход которой сое динен с первым входом схемы ИЛИ и с выходом второго компаратора, вход которого через дифференциатор заданного значения скорости соединен с блоком сравнения, второй вход схемы ИЛИ соединен с блоком ограничения.
Кроме того, согласующий блок содержит последовательно соединенные схему ИЛИ и элемент задержки, причём входы схемы ИЛИ являются входами, а выход элемента задержки выходом согласующего блока.
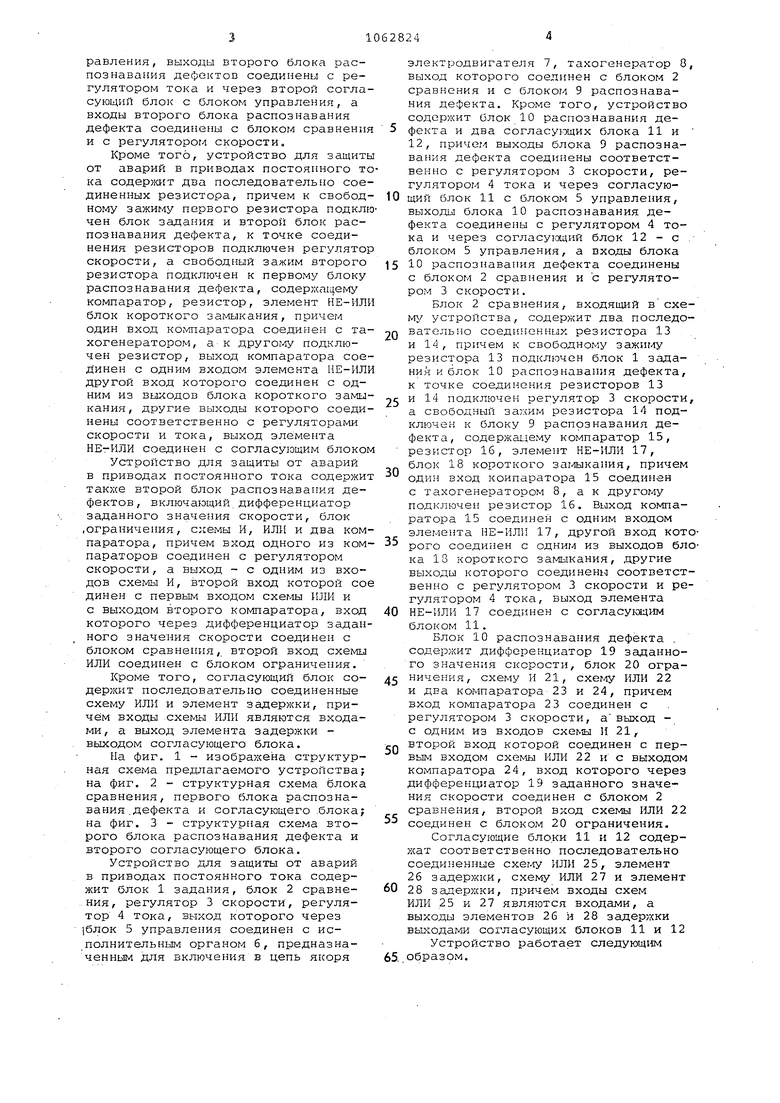
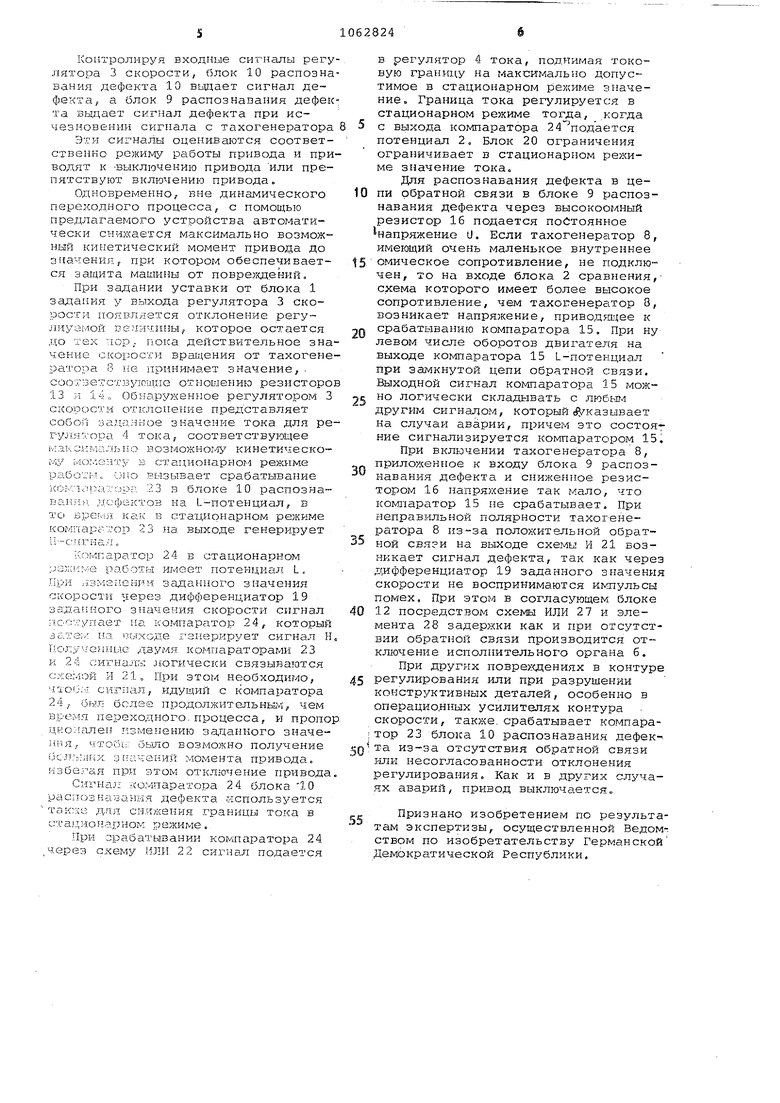
На фиг. 1 - изобра хе1яа структурная схема предлагаемого устройства; на фиг. 2 - структурная схема блока сравнения, первого блока распознавания .дефекта и согласующего .блока; на фиг. 3 - структурная схема второго блока распознавания дефекта и второго согласующего блока.
Устройство .для защиты от аварий в приводах постоянного тока содержит блок 1 задания, блок 2 сравнения, регулятор 3 скорости, регулятор 4 тока, выход которого через 1блок 5 управления соединен с исполнительным органом 6, предназначенным для включения в цепь якоря
электродвигателя 7, тахогенератор О выход которого соединен с блоком 2 сравнения и с блоком 9 распознавания дефекта. Кроме того, устройство содержит блок 10 распознавания дефекта и два согласующих блока 11 и 12, причем выходы блока 9 распознавания дефекта соединены соответственно с регулятором 3 скорости, регулятором 4 тока и через согласующий блок 11 с блоком 5 управления, выходы блока 10 распознавания дефекта соединены с регулятором 4 тока и через согласугадий блок 12 - с блоком 5 управления, а входы блока 10 распознавания дефекта соединены о блоком 2 сравнения и с регулятором 3 скорости.
Блок 2 сравнения, входящий в устройства, содержит два последовательно соединенных резистора 13 и 14, причем к свободному зажи1.ту резистора 13 подключен блок 1 задания и блок 10 распознавания дефекта, к точке соединения резисторов 13 и 14 подключен регулятор 3 скорости а свободный заким резистора 14 подключен к блоку 9 распрзнавания дефекта, содержащему компаратор 15, 1G, элемент НЕ-ИЛИ 17, блок 18 короткого затикания, причем один вход коипаратора 15 соединен с тахогенератором 8, а к другому подключен резистор 16. Выход компаратора 15 соединен с одним входом элемента НЕ-ИЛИ 17, другой вход котрого соединен с одним из выходов бл ка 18 короткого замыкания, другие выходы которого соединены соответственно с регулятором 3 скорости и регулятором 4 тока, выход элемента НЕ-ИЛИ 17 соединен с согласукядим блоком 11.
Блок 10 распознавания дефекта . содержит дифференциатор 19 заданного значения скорости, блок 20 ограничения, схему И 21, cxe ИЛИ 22 и два компаратора 23 и 24, причем вход компаратора 23 соединен с регулятором 3 скорости, авыход с одним из входов cxeNM И 21,второй вход которой соединен с первым входом схемы ИЛИ 22 и с выходом компаратора 24, вход которого через дифференциатор 19 заданного значения скорости соединен с блоком 2 сравнения, второй вход схемы ИЛИ 22 соединен с блоком 20 ограничения.
Согласующие бло.ки 11 и 12 содерхсат соответственно последовательно соединенные ИЛИ 25, элемент 26 задержки, схему ИЛИ 27 и элемент 28 задержки, причем входы схем ИЛИ 25 и 27 являются входами, а выходы элементов 26 и 28 задержки выходами согласующих блоков 11 и 12
ycTpofCTBo работает следующим образом.
ГСонтролируя входные сигналы регулятора 3 скорости, блок 10 распознавания дефекта 10 вьщает сигнал дефекта, а блок 9 распознавания дефекта выдает сигнал дефекта при исчезновении сигнала с тахогенератора
Эти сигналы оцениваются соответственко режиму работы привода и приводят к Выключению привода или препятствуют включению привода.
Одновременно,- вне динамического переходного процесса, с помощью предлагаемого устройства автоматически снижается максимально возможный кинетический дмомент привода до значенияf при котором обеспечивается защита машины от повре}кдений.
При задании уставки от блока 1 задания у выхода регулятора 3 скорости появляется отклонение регулиузмой сепичиЕШ, которое остается до тех viop,- пока действительное зна чение скорости вращения от тахогемератора 8 не принимает значение,. соответствующие отношению резисторо 13 ji 14 „ Обнаруженное регулятором 3 скорости отклонение представляет собом заданное значение тока для регулятора 4 тока, соответствующее г..:ака;-1маль 1о возможному кинетическому ыо:.:ент:у- в стационарном режиме рабоТ|-:1„ оно вызывает срабатывание io::;vn ; i5aTop . 23 в блоке 10 распознавания, ,1дсфе;стов на L-потенциал, в TCi BpefviH KfiK в стационарном режиме компаратор 23 на, выходе генерирует И-с:игна/1 „
;(омпара,то,р 24 в стационарном :,к:. работы потенциал L, При ,;i;3MeneHi.ui заданного значения скорости уерез дифференциатор 19 заданного значения скорости сигнал ;1с-::.упает на 1юмпаратор 24, который зьте;/ на оыходе :гэнерирует сигнал Н Г1,олу-/сяшле двумя ко-м,параторами 23 и 24 сигналь: логически связываются схемой И 21„ При этом необходимо, что(3;у сигнал, идущий с компаратора 24- был более продолжительны; ;, чем в,|;-емя переходного, процесса, и пропо цио,иален изменению за,данкого значеJiiUi,, чтобь:: было возможно получение 3сл,-:лих значений момента привода. избегая при этом отключение привода
Сигпа.ч ,:;:омпаратора 24 блока 10 распоз наван:ия дефекта используется так;:.;е дал си,кжания границы тока в ста.цио.аг;но - режиме.
При срабатывании компаратора 24 , через с,хему ИЛИ 22 сигнал подается
в регулятор 4 тока, по,диимая токовую границу на максимально допустимое в стационарном режиме значение. Граница тока регулируется в стационарном режиме тогда, когда с выхода компаратора 24 подается потенциал 2, Блок 20 ограничения ограничивает в стационарном режиме значение тока.
Для распознавания дефекта в це0 пи обратной связи в блоке 9 распознавания дефекта через высокоомный резистор 16 подается постоянное напряжение U. Если тахогенератор 8, имеющий очень маленькое внутреннее
5 омическое сопротивление, не подключен, то на входе блока 2 сравнения,схема которого имеет более высокое сопротивление, чем тахопенератор 8, возникает напряжение, приводкш ее к
Q срабатыванию компаратора 15, При ну левом числе оборотов двигателя на выходе компаратора 15 L-потенциал при замкнутой цепи обратной связи. Выходной сигнал компаратора 15 мож5 но логически складывать с любыгл другим сигналом, который «Оказывает на случаи аварии, причем это состоя-;ние сигнализируется компаратором 15.
При включении тахогенератора В, прилох енпое к входу блока 9 распознавания дефекта и сниженное резистором 16 напряжение так мало, что компаратор 15 не срабатывает. При неправ:яльной полярности тахогенератора 8 из-за положительной обратэ ной связи на выходе схемы И 21 возникает сигнал дефекта, так как через дифференциатор 19 заданного значения скорости не воспринимаются иклульсы помех. При этом в согласующем блоке
0 12 посредством схемы ИЛИ 27 и элемента 28 задержки как и при отсутствии обратной связи производится отключение исполнительного органа 6. При других повреходениях в контуре
5 регулирования или при разрушении конструктивных деталей, особенно в операционных усилителях контура скорости, также,срабатывает компара; тор 23 бло1са 10 распознавания дефекQ та из-за отсутствия обратной связи или несогласованности отклонения регулирования. Как и в других случаях аварий, привод выключается
Признано изобретением по результатам экспертизы, осуществленной Ведомг ством по изобретательству Германской Демократической Республики,
Фиг. 2
ME
