потокосцепления, а вход формирователя логического сигнала фактического тока подключен к третьему входу блока управления инвертором, выход которого образован выходом операционного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1334347A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержаизий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленно1- у из последовательно соединенных автономного инвертора тока, дросселя и управляемого шапрямителя, дaтчиkи фазных TokoB и напряжений, тахоГенератор, установленный на валу асинхронного двигателя с короткозамкнутым ротором, последовательно соединенные блок задания скорости, элемент сравнения и регулятор скорости , блок управления выпрямителем и блок управления инвертором, снабженный формирователем сигйала выходной частоты и формирователем сигнала потокосцепления, при этом выход регулятора скорости подключен к входу блока управления вы прямителем, соединенного выходом с управляющим входом.управляемого выпрямителя, и к первому входу блока управления инвертором, второй вход которого и второй вход элемента сравнения объединены между собой и подключены к выходу тахогенератора, выходы датчиков фазных токов и напряжений подключены соответственно к третьему и четвертому входам блока управления инвертором, выход которого соединен с управляющим входом автономного инвертора тока, причем первый и второй входы блока управления инвертором образованы входами формирователя сигнала выходной частоты, а третий и четвертый входы - входами формирователя сигнала потокосцепления, о т л и, чающийся тем, что, с целью улучшения качества работы путем повышения быстродействия, в блок управления инвертором дополнительно введен узел коррекции, снабженный операционным усилителем, тремя резисторами, двумя управляекыми .ключами, нелинейным преобразователем, формирователями логических сигна(Л лов заданного и фактического токов и элементом логического сравнения, с первый и второй выходы которого подключены соответственно к входам управления первого и второго управляемых ключей, а первый и второй входы подключены соответственно к выходам формирователей логических сигналов заданного и фактического токов, при этом в цепь,обратной со со с/о | :связи операционного усилителя вклю;чены параллельно соединенные первый резистор и первый управляемый ключ, а к входу операционного усилителя подключены второй резистор и один из выводов второго управляемого ключа, 00 другой вывод которого подключен к третьему резистсчру, вторые выводы второго и третьего резисторов объединены между собой и подключены к выходу формирователя сигнала выходной частоты, первый вход Формирователя .логического сигналазаданного тока, подключен к выходу нелинейного преобразователя,соединенйого входом с первым входом блока управления инвертором, второй вход формирователя логичес,кого сигнала заданного тока ПОДКЛКР|чен к выходу формидювателя сигнала
Изобретение относится к электротехнике и может быть исп.ользовано в системах автоматического управления частотно-регулируемыми электроприводами общепроидипенного назначения,выполненными на основе асинхронного короткозамкНутого двигателя и тиристорного преобразователя частоты с автономным инвертором тока.
Известен. частотно-регулируе1 1й асинхронньй электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорныё обмоки которого подключены к преобразователю частоты, датчик тока статора, импульсный датчикскорости установленный на валу асинхронного двигателя,последовательно соединенные блок задания скорости, элемент сравнения и регулятор скорости, пер вый преобразователь напряжение-частота, пёрвйй и второй сумматоЕял, йыход которого подключен к входу управления частотой блока управлени соединенНого выходом с управлйпщим входом преобразователя частоты при этом выход импульсного датчика UKOрости подключен к второму входу перйого су1йматора, а через преобраЗФватель частота-гнапряжение - к вто рому входу элемента сравнения, выход регулятора скорости через первый функциона:пь }ый преобразователь дополнительно подключен к входу второго преобразователя напряжение - частота, выходом соединенного с вторым входом jBToporo сумматора, выход регулятора скорости через второй фуикциональный преобразователь дополнительно подключен к первому входу третьего сумматора, второй вхо4 которого соединен с выходом датчика тока статора а выход подключен к входу управления величиной тока блока управления l .
Однако такое устрбйстйо отличается конструктивной сложностью и недостаточно высокиью статическими и динамическими показателями, что обусловлено необходимостью применения импульсного датчика скорости и блоков суммирования импульсным сигналом. Кроме того в системе упраления электрошжводом не ПРОИЗВОДИТся учет запаздывания, вносимого преббразователем частоты, что также снижает динамические показатели.
Наиболее близким к предлагаемому ;|вляется частотно-регулируекый асихронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорныё обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных автономного инвертора тока, дросселя и управляемого выпрямителя, датчики фазных токов и йапряжений, тахогенератор, установленный На валу асинхронного двигателя, последовательно соединенные блок задания скорости. элемент сравйения и регулятор скорости , блок управления инвертором, снабженный формирователем сигнала выходной частоты и формирователем сигнала потокосцепления, при этом выход регулятора скорости подключен к входу блока управления выпрямителем, соединенного выходом с управляющим входом управляемого выпрямителя, и к первому входу блока управления инвертором, второй вход которого и второй вход элемента сравнения объединены между собой.и подключены к выходу тахогенератора, выходы датчиков фазных токов и напряжений подключены соответственно к третьему и четвертому входам блока управления инвертором, причем первый и ВТО0ОЙ ВХОФ1 блока управления инвертором образованы входами формирователя сигнала выходной частоты, а третий и четвертый входы - входами формирователя сигнала потокосцепления, выходом подключенного к дополнительному входу формирователя сигнала выходной частоты, выход которого образует выход блока управления инвертором и подключен к управляющему входу автономного инвертера тока 2 .
Недостатком известного частотно-регулируемого асинхронного электропривода являемся невысокое качество регулирования в динамических режимах работы из-за отсутствия контроля фазы между векторами тока и потокосцёплеиия.
Цель изобретения - улучшение качества работы частотно-регулируемого асинхронного электропривода за
счет повышения быстродействия путем непосредственного управления фазой между векторами тока и потокосцепления.
Указаннс1Я цель достигается тем, что в частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные ки которого подключены к преобразователю частоты, составленному из последовательно соединенных автономного инвертора тока, дросселя и управляемого выпрямителя, фазных токов и напряжений, тахогенератор, установленный на валу асинхронного двигателя с к н откозамкнутым ротором, последовательно соединенные блок задания скорости, элемент сравнения и регулятор скорости, блок управления выпрямителем и блок управления инвертором, снабженный формирователем сигнала выходной частоты и формирователем сигнала потокосцеяления I при зтсял выход регулятора скорости подключен к входу блока управления быпрямителем, соединенного выходом с управЛЯ1МЦИМ входом управляемого выпрямителя , и к первому входу блока управления инвертором, второй вход которого и второй вход элемента сравнения объединены между собой и подключены к выходу тахогенератора, выходы датчиков фазшлх токой и напряжений подключены соответственно к третьему и четверток вхапаМ блока управления инвертором,; выход которого соединен с управляющим входом автономного инвертора тока/ причем первый и второй входы блока управления инвертором образованы вхойамн формирователя сигнала частоты, di третий и четвертый BXOfH - входаг формирователя CHfHana потокосцепяения, д блок управления инвертором дополнительно введен узел коррекции снабженный операционным усилителем, тремя резисторами. Двумя управляема ми ключами, нелинейным преобразователем, формирователями логических сигналов заданного и фактического тО ков и элементом логического сравнения, первый и второй входы которого подключены соответственно к входам управления первого и второго yпpaвляe ыx ключей, а первый и второй входы подключены соответственно к выходам формирователей логических сигналов заданного и фактического токов,при этом в цепь обратной связи операционного усилителя включены параллельно соединённые первый резистор и первый управляемой ключ,, а к входу операционного усилителя подключен второй резистор и один из выводов второго
управляемого ключа, другой вывод которого подключен к третьему резистору, вторые выводы второго и третьего резисторов объединены между собой и подключены к выходу форми5 рователя сигнала выходной частоты, первый вход формирователя логического сигнала заданного тока подключен к выходу нелинейного преобразователя, соединенного входом с 10 первым входом блока управления инвертором, второй вход формирователя логического сигнала заданного тока подключен к выходу формирователя сигиёша потокосцегшения, а
вход формирователя логического сиг - -е нала фактического тока подключен к третьему входу блока утфавления инвертором, выход которого образован клходом операционного усили-
Q теля.
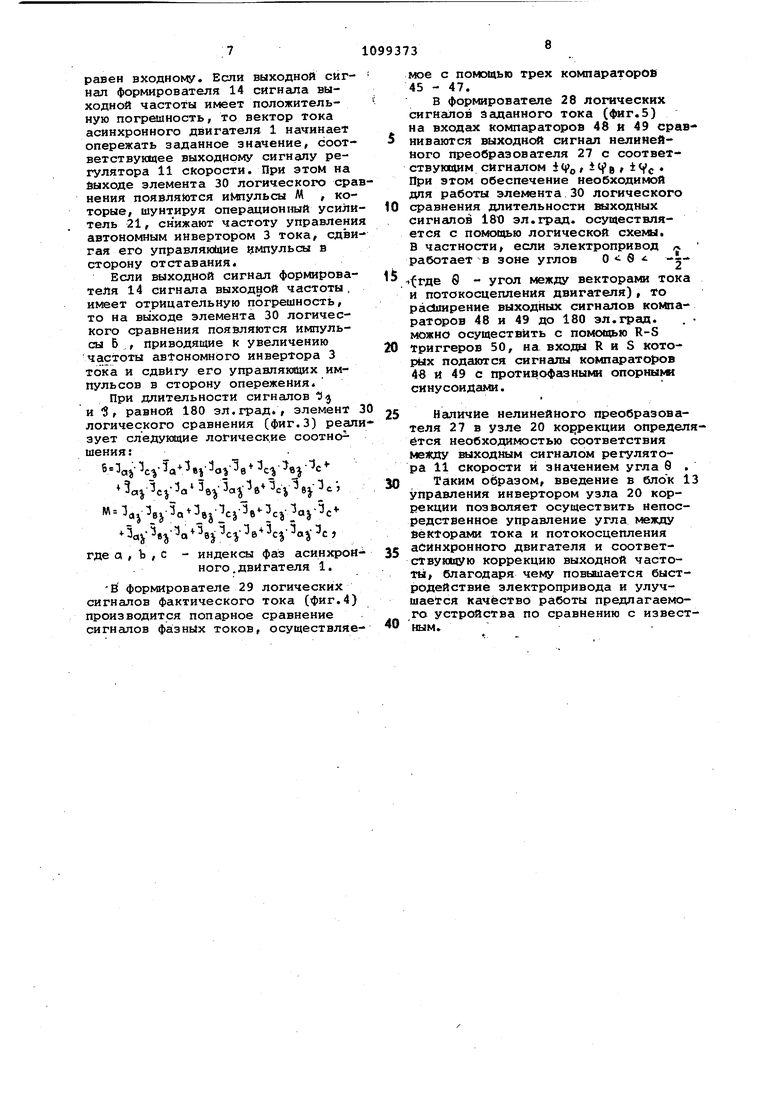
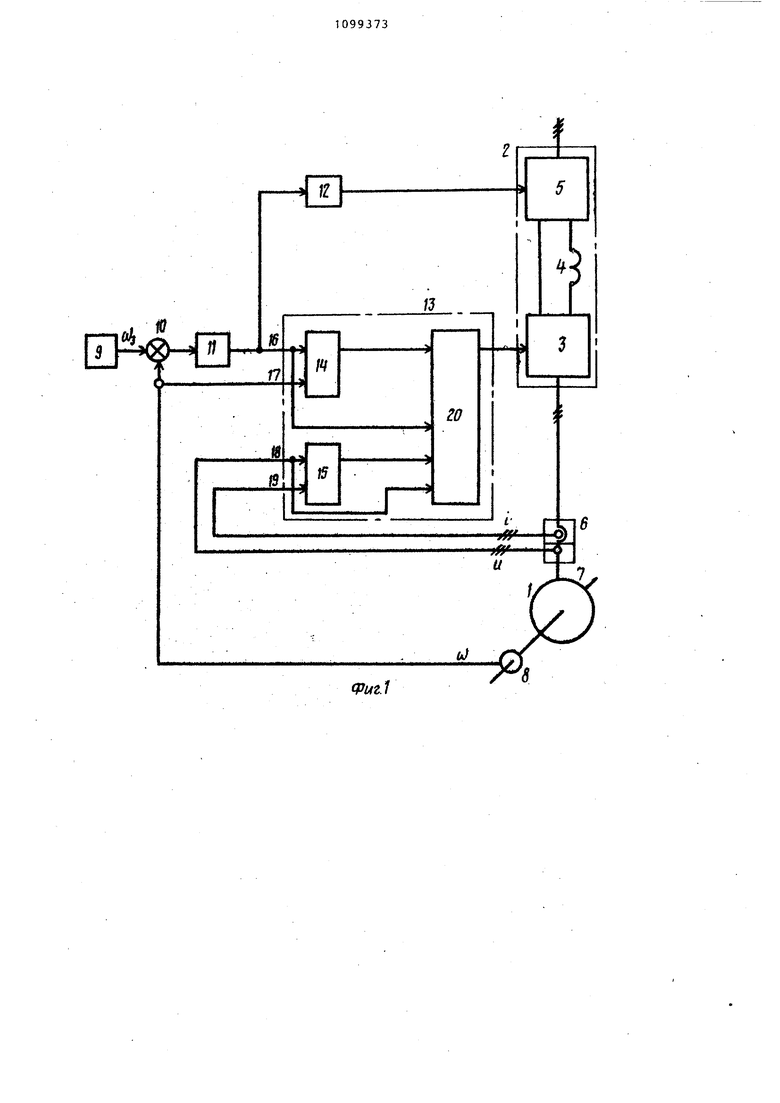
На фиг. 1 представлена структурная схема частотно-регулируемого асинхронного электропривода; на фиг.2 - структурная схема узла кор25 рекции; на фиг. 3 - схема элемента логического сравнения; на фиг.4 схема формирователя логического сигнала фактического тока; на фиг.5 схема формирователя логического
4л сигнала заданного тока.
Частотно-регулируемый асинхрониый электропривод содержит асинхронный двигатель 1 (фиг.1) с короткозамкнутым ротором, статорные обмотки
котсчрого подключены к преобразова5 телю 2 частоты, составленному из последовательно соединенных автономного инвертора 3 тока, дросселя 4 и .управляемого выпрямителя 5, датчики фазных токов 6 и фазных на0 пряжений 7, тахогенератор 8, установленный На валу асинхронного двигателя 1, последовательно соединенные блок 9 задания скорости, элемент 10 сравнения и регулятор 11 ско5 рости, б|Лок 12 управления выпрямителем и блок 13 управления инвертоо ром, снабженный формирователем 14 сигнала выходной частота и формирователем 15 сигнала потокосцепления,
0 этсм выход регулятора 11 скорости подключен к входу блока 12
управления выпрямителем, соединенного выходом с управляющим входом управляемого выпрямителя 5, и к перI- вому входу 16 блока 13 управления
инвертором второй вход 17 которого
и второй вход элемента 10 сравне ния объединены между собой и подключены к выходу тахогенератора 8, выходы датчиков 6 фазных токов под0 клю1Чены к третьему входу 18 блока 13 управления инвертором, выходы датчиков 7 фазных напряжений подключены к четвертому входу 19 блока 13 управления инвертором, выход
5 которого соединен с управляющим
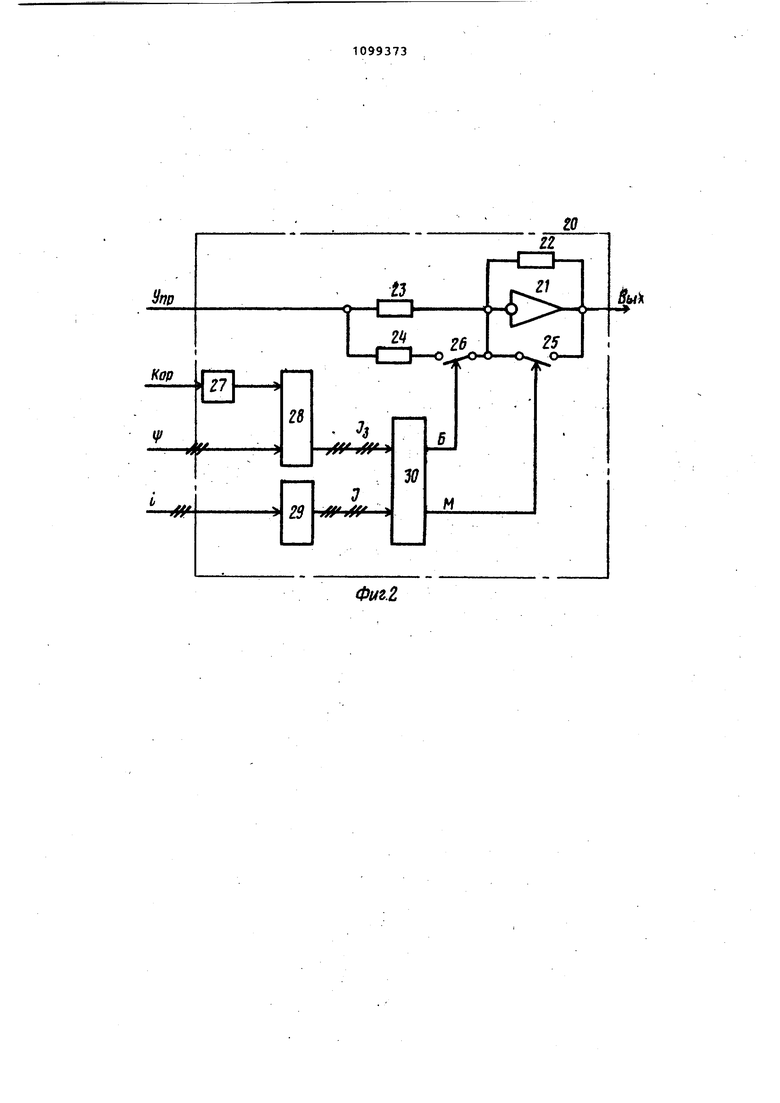
входом автономногб инвертора .3 тока, причем первый и второй входы 16 и 17 блока 13 управления инвертором образованы входами формирователи 14 сигнала выходной частоты, а третий и четвертый входы 18 и 19 - входа- 5 ми формирователя 15 .сигнада пот окосцепления. , В блок 13 управления инвертором дополнительно введен узел 20 коррекции, снабженный операционным уси- 10 лителем 21 (фиг.2),тремя резисторами 22 - 24, двумя управляемлми ключами 25 и 26, нелинейным преобрашователем 27, формирователя 28 и 29 логических сигналов заданного 5 и фактических токов и элементом 30 логического сравнения, первый и второй выходы Которого подключены соответственно к йходам управления первого и второго управляелих 20 ключей 25 и 26, а первый и второй входы подключены соответственно к выходам формирователей 28 и 29 логических сигналов заданного и фактического токов, при этом fi . 25 цепь обратной связи операционного усилителя 21 включены параллельно
Соединенные первый резистор 22 и Первый управляемый ключ 25, а к входу операционного усилителя 21 подключены второй резистор 23 и . один из выводов второго управляемого ключа 25 другой вывод которого подключен к третьему-резистору 24, вторые выводы второго и третьего резисторов 23 и 24 объединены между 35 собой и подключены к выходу формирователя 1Л сигнала выходной частоты, первый вход формирователя 28 логического сигнала заданного тока подключен к выходу формирователя 15 40 сигнала потокосцепленйя, а вход формирователя 22 логического сигнала фактического тока подключен к-; третьему входу 18 блока 13 управления инвертором, выход, которого об- 45 разован. выходом операционного усилителя 21. .
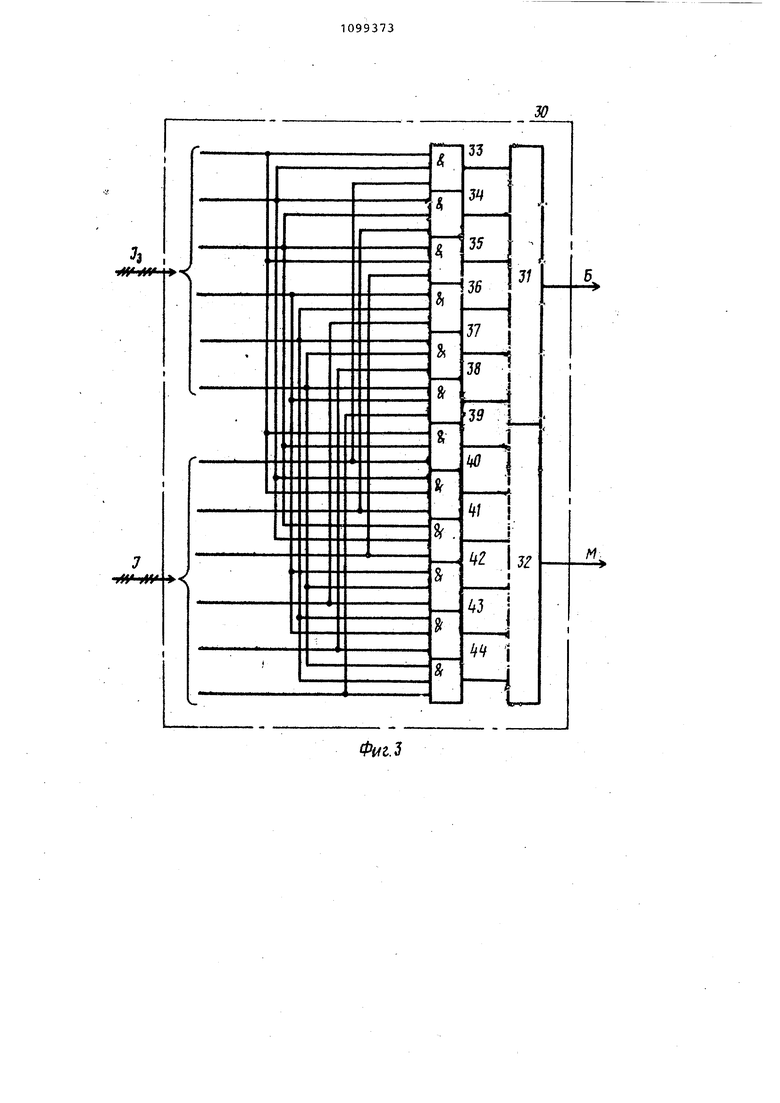
Элемент 30 логического сравнения содержит две шестивходовые ИЛИ 31 и 32 (фиг.З) и подключенные JQ к их входам двейадцать-трехвходовых схем И 33-44j входы которых образуют первый и второй входы элемента 30 логического сравнения, а выходы элемента 30 логического срав- «
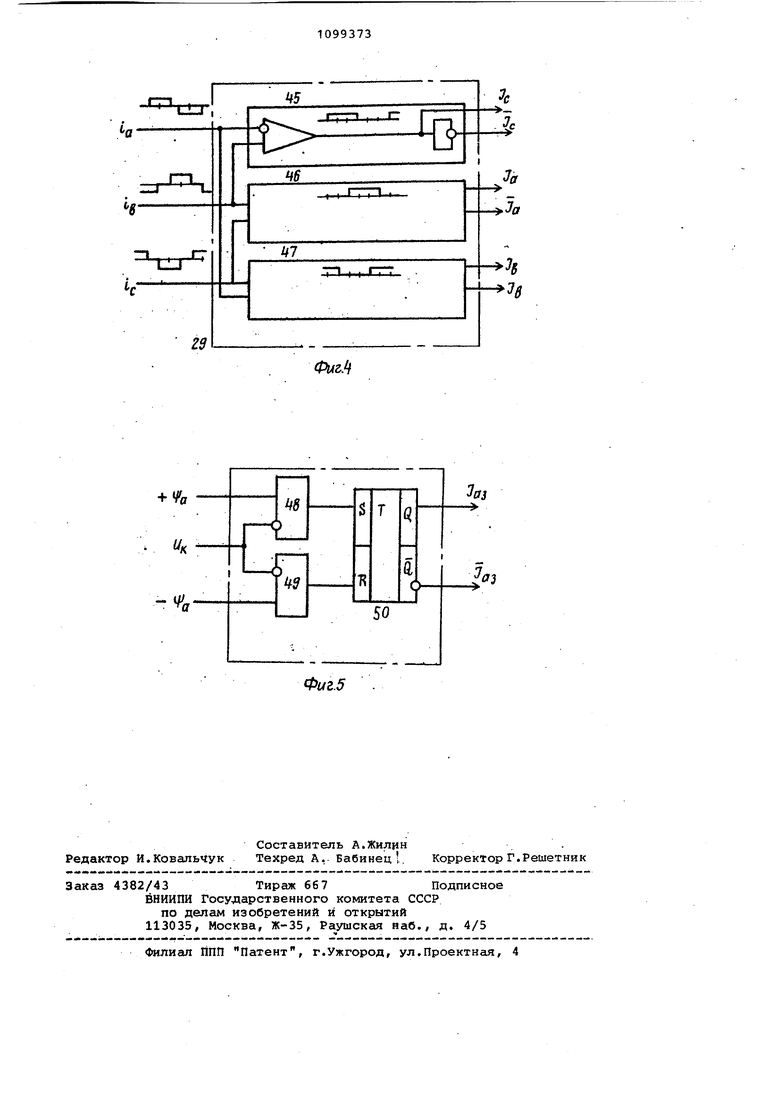
нения образованы выходам схем ИЛИ 31 и 32. Формирователь 29 логического сигнала фактического тока содержит три компаратора 45-47 (фиг.4), Формирователь 28 логического сигнала заданного тока со- 60 держит в каждой фазе компараторы 48 и 49 (фиг.5) и триггер 50.
Частотно-регулируемый асинхрон- -. ный электропривод работает следующим образом.65
Выходной сигнал о- блока 9 задания скорости сравнивается в элементе 10 сравнения с выходным сигналом тахогенератора 8 и поступает на вход регулятора 11 скорости, на выходе которого формируется сигнал скольжения. В формирователе 14 сигнала выходной частоты производится сложение выходных сигналов : регулятора 11 скорости (сигнала скольжения) и тахогенератора 8.
Выходной сигнал регулятора 11 скорости поступает также на вход блока 12 управления выпрямителем, выполненного в виде-, функционального преобразователя, зависимость которо йход - выход выбирается, исходя из требуемой зависимости потока двигателя от момента на его валу. Для динамичных приводов обычно требуется поддержание постоянства потока при изменении момента.
На выходе формирователя 14 сигнала выходной частоты сигнал имеет статическую и динамическую погрешность, определяемые погрешностями выходных оигнапой тахогенератора 8 и регулятора 11 . Эта погрешность, может быть Исключена с помощью узла 20 коррекции, на ос- новной вход которого поступает илхрдной сигнал формирователя 14 сигнала выходной частоты, а на корректирующий вход - сигнал скольжения с выхода регулятора 11 скорости. .
Б узле 20 коррекции сигнал скольжения через нелинейный преобразователь 27 подается на первый вход формирователя 28 логического сигнала заданного тбка, где с помощью опорных сигналов потокосцепленйя, поступающих с выхода формирователя 29 сигнала потокосцепленйя: формируются Логические сигналы 3j задания тока двигателя. В элементе 30- логического сравйейия производится сравнение логи ееких сигналов j с логическими сигналами фактического .тока :, поступающими с выхода формирователя 29. В результате этого сравнения на выходе элемента 30 логического сравнения вырабатываются сигналы б (больше) или М (меньше), управляшиё соответственно управляемыми ключами 26 и 25 к осуществляющие коррекцию сигнала частоты.
Если выходной сигнал формирователя 14 сигнала выходной частоты не имеет погрешности, то фактическое положение вектора тока в асинхронном двигателе соответствует заданному и на выходе элемента 30 логического сравнения сигналы Б и М не вырабатываются. В этом случае выходной сигнал узла 20 коррекции равен входному. ЕСУТИ выходной сигнал формирователя 14 сигнгша выходной частоты имеет положительную погрешность, то вектор тока асинхронного двигателя 1 начинает опережать заданное значение, соответствуквдее выходному сигналу регулятора 11 скорости. При этом на быходе элемента 30 логического сра нения появляется иМпульсы М f которые, шунтируя операционный усили тель 21, снижают частоту управлени автономным инвертором 3 тока, сдви гая его управляю дие импульси в сторону отставания Если выходной сигнал формирователя 14 сигнала выходной частоты, имеет отрицательную погрешность, то на выходе элемента 30 логического сравнения появляются импульсы 5 , приводящие к увеличению частоты автономного инвертора 3 тока и сдвигу его управляющих импульсов в сторону опережения. При длительности сигналов 30 и З , равной 180 эл.град, элемент логического сравнения (фиг.З) реал зует следующие логические соотно шения: 60aj-lcvV evW e ci e - c .,, aj ey a ejcj- e -3cv aj- cOaj, где a , Ъ , с - индексы фаз асинхрон ного,двигателя 1. И формирователе 29 логических сигналов фактического тока (фиг.4) производится попарное сравнение сигналов фа:знЫх токов, осуществляе мое с помощью трех компараторОБ 45 - 47. В формирователе 28 Логических сигналов заданного тока (фиг.З) на входах компараторов 48 и 49 срав- ниваются выходной сигнал нелинейного преобразователя 27 с соотвехствукхцим сигналом При этом обеспечение необходимой для работы элемента 30 логического сравнения длительности каходных сигналов let) эл.град. осуществляется с помощью логической схемы В частности, если электропривод работает в зоне углов О « в - {тде S - угол между векторами тока и потокосцепления двигателя), то расширение выходных сигналов компараторов 48 и 49 до 180 эл.град. . можно осуществить с помощью R-S триггеров 50, на входы R и S которых подаются сигналы компараторов 4В li 49 с противофг1знык« опорныкм cинycoидa и. Наличие нелинейного преобразователя 27 в узле 20 коЕ рекции определяется необходимостью соответствия между выходным сигналом регулятора 11 скорости и значением угла 9 . Таким образом, введение в блок 13 управления инвертором узла 20 коррекции позволяет осуществить непосредственное управление угла между векторами тока и потокосцепления асинхронного двигателя и соответствующую коррекцию выходной частоты, благодаря чему повьипается быстродействие электропривода и улучшается качество работы предлагаемого устройства по сравнению с известным.
Упр
Фиг2
Фиг.5
+ Va /(
Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ 1563228, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
