1
Изобретение относится к области управления приводом рудничных нодъемных установок и может применяться для управления другими механизмами, скорости изменения которых заранее запрограммированы.
Известно устройство для управления скоростным режимом нодъемной установки, состоящее из блока задания одной нрограммы, выход которого через регулятор с узлом токовой отсечки соединен с электродвигателем, датчиков скорости вращения вала и тока якоря электродвигателя, соединенного со входом узла токовой отсечки 1.
Недостаток этого устройства заключается в том, что оно не позволяет формировать сигнал о ноявлении дефектов в элементах подъемного комплекса, поэтому управление установкой осуществляется без ненрерывного контроля состояния элементов комплекса, что является одной из причин аварий.
Известно устройство управления электродвигателем, содержащее блок задания программ, регулятор скорости электродвигателя, датчик скорости вращения и компаратор, входы которого соединень с блоком задания программ и скорости вращения вала электродвнгателя 2.
Недостатком этого устройства является отсутствие в нем элементов контроля тока якоря
электродвигателя, что не позволяет обнаруживать дефекты в направляющих и крепежных элементах подъемного комплекса.
Известно устройство унравления скоростным режимом подъемной установки, содержащее блок задания нескольких программ, выход которого через регулятор с узлом токовой отсечки соединен с электродвигателем, датчики скорости вращения вала электродвигателя и
тока якоря электродвигателя, соединенного со входом узла токовой отсечки 3.
Недостатком этого устройства является отсутствие в нем элементов сравнения скорости вращения и тока якоря электродвигателя с заданными значениями, что не позволяет осуществлять контроль состояния нанравляющих и кренежных элементов подъемного комплекса. С целью снижения количества аварий на
иодъемных ко.мплексах нредлагаемое устройство снабжено блоками дискретных уставок скорости сосуда, дискретных уставок тока электродвигателя, компараторами скорости и тока, элемеитамп И и задерлски, при этом
входы блоков дискретных уставок скорости и тока подключены к выходам блока программы изменения скорости, а выходы - к одним из входов соответствующих компараторов скорости и тока, к другим входам которых иодключены соответственно датчики скорости сосуда и тока злектродвигателя, один из входов элемента И нодключен к выходу компаратора cKopocjii через элемент задержки, а другой к выходу компаратора тока - неносредственно, а выход подключен к исполнительному элементу блока сигнализации и аварийного управления.
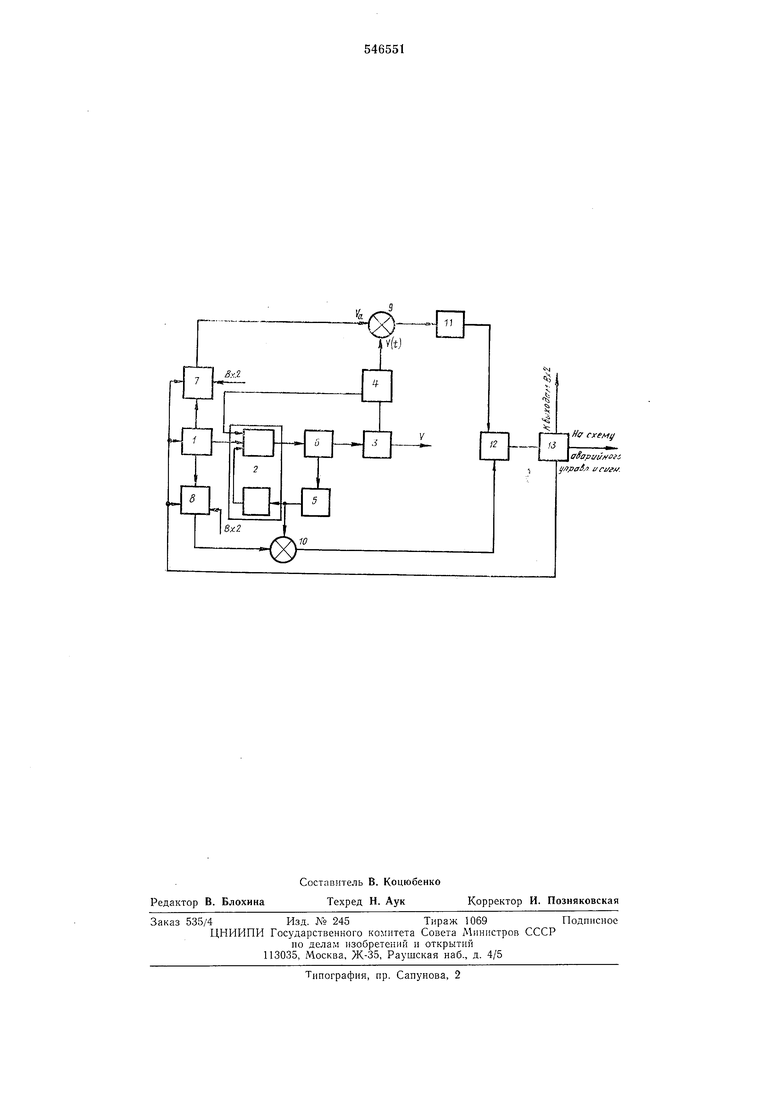
На чертеже нредетавлена блок-схема предлагаемого устройства.
В устройстве один из выходов блока 1 программы изменения скорости подключен к одному нз входов регулятора 2 скорости сосуда 3 (с токовой отсечкой), к другнм входам которого подключены датчик 4 фактической скорости сосуда и датчик 5 тока электродвигате;гя (). К другим выходам блока 1 программы изменения скорости подключены соответствуюнию блока 7 дискретных уставок скорости н блока 8 дискретных уставок тока электродв1Нателя 6, выходы которых подключены соответственно к одним из входов компаратора 9 скорости и компаратора 10 тока, к другим входам подключены также соответственно датчики 4 фактической скорости сосуда и датчик 5 тока электродвигателя 6. Выход комнаратора 9 иодключен через элемент 11 задержки к одному из входов элемента И 12, к другому входу которого выход комнаратора 10 тока нодключен непосредственно. Выход элемента И 12 нодключен к блоку 13 аварийной сигиализации и управления с исполнительным элементом.
Устройство работает следующим образом.
Блок 1 программы изменения скорости выдает нрограммы с различными скоростями максимального движения сосудов подъемной машины. Блок 7 формирует дискретные уставки скорости, равные максимальным скоростям упомянутых программ, а блок 8 - дискретные уставки, равные среднему значению тока якоря электродвигателя 6, определяемых на участке равномерного движения (не в интервалах пуска) сосудов при иснолнении различных программ и при хорошем состоянии ( после ремонта и наладки) армировки ствола. Согласно выбранной ирограмме регулятор 2 и электродвигатель 6 производят изменение скорости сосуда 3. На выходе датчика 5 появляется сигнал больший или меньший, чем сигнал уставки на входе компаратора 10. Сигнал на выходе компаратора 10 появляется, когда ток якоря двигателя 6 больше уставки. Однако на выходе элемента И 12 сигнал не появптся, если выходной сигнал компаратора 9 остается меньше, чем уставка на входе компаратора 9. Когда скорость достигает заданной максимальной величины для выполняемого цикла подъема, на выходе компаратора 9 появится сигпал. После выполиения этого условия на выходе элемента 11 задержки появится сигнал. К этому времени иусковой режим уже закончен и, если сосуд (подъемная установка) работает в таком же режиме, как и после наладки (нет доиолнительных возмушений, таких как, например, увеличение момента на валу во время равномерного движения и т. д.), то ток якоря не превышает уставки и на выходе элемента И 12 сигнал отсутствует. Нарушение этого условия из-за появления дефектов в элементах комнлекса приводит к росту тока якоря, срабатыванию компаратора 10 и к иоявлению сигнала на выходе элемента И 12. Нри этом блок 13 в блок 1 выдаст сигнал, разрешающий для последующих циклов
подъема выбор программ лишь с максимальными скоростями движения, меньшими по сравнению со скоростью, при которой сработал блок 13. Одновременно сигнал с выхода блока 13 подается на вторые входы блоков 7,
8, которые нри этом приводятся в исходное положение.
Формула изобретения
Устройство для управления скоростным реж:имом подъемной установки, содержащее блок программы изменения скорости, датчики сферических скоростей иодъемного сосуда и тока электродвигателя, выходы которых соединены с соответствующими входами регулятора скорости сосуда, блок аварийной сигнализации и управления с исполнительным элементом, отличающееся тем, что, с целью снижения количества аварий, оно снабжено
блоками дискретных уставок скорости сосуда, дискретных уставок тока электродвигателя, комнараторами скорости и тока, элементами И и задержки, нри этом входы блоков дискретных уставок скорости и тока подключены
к выходам блока программы изменения скорости, а выходы - к одним из входов соответствующих компараторов скорости и тока, к другим входам которых подключены соответственно датчики скорости сосуда и тока электродвигателя, один из входов эле.мента И подключен к выходу комнаратора скорости через элемент задержки, а другой к выходу компаратора тока - неносредственно, а выход подключен к исполнительному элементу блока
сигнализации и аварийного управления.
Источники информации, принятые во внимание при экспертизе:
1.Киричек Ю. Г., Чермалых В. М. «Привод шахтных подъемных установок большой мощности, М., 1972 г.
2.Патент США № 3576485, кл. 318-434, 1971 г.
3.Салихов 3. Г. и др. «Инвариантная система автоматического управления мощными
электроприводами. Известия, вузов «Электромеханика, № 1, 1973 г. (прототип).
1
8x2
Hff cxfMt
seapi uf f vruff/.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора скоростного режима подъемной установки | 1976 |
|
SU659501A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для токовой защиты электропривода подъемной установки | 1981 |
|
SU961028A1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРИВОДИМОГО ОБОРУДОВАНИЯ | 2003 |
|
RU2263383C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |