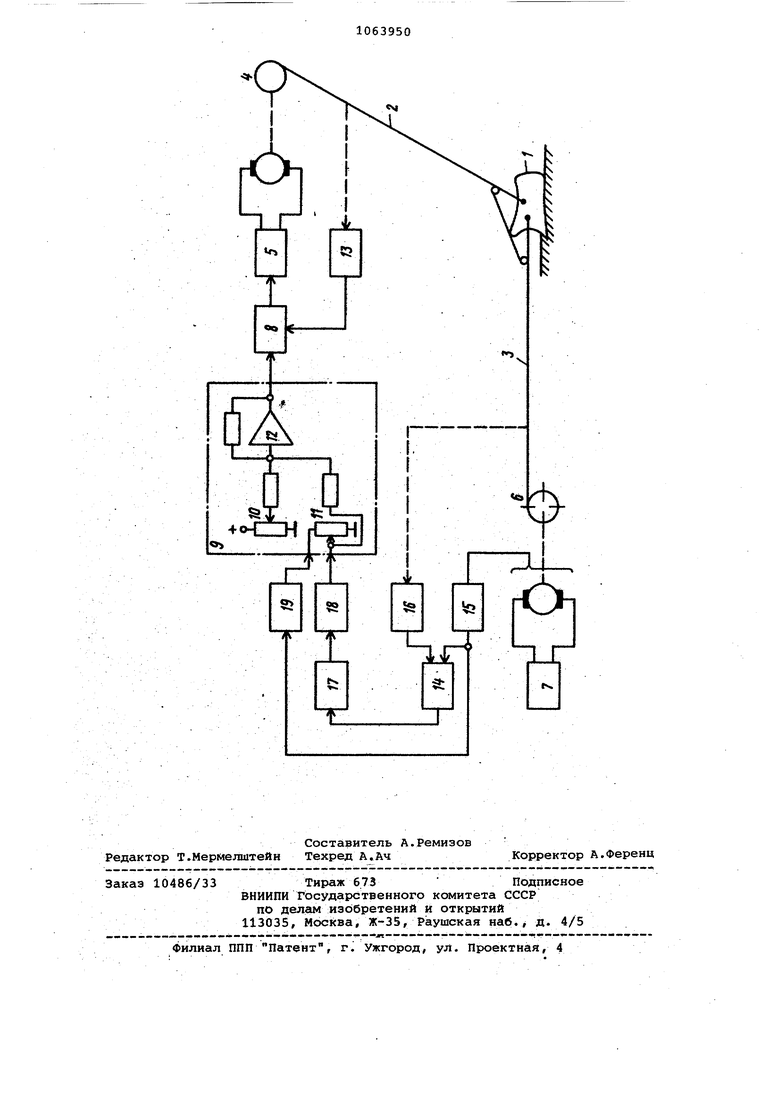
Изобретение относится к горнЬй промыоленнести и может быть использовано для управления рабочим обору дованием экскаваторов-драглайнов. Известно устройство для управления рабочим оборудованием экскава тора-драглайна, содержащее блок регулирования скорости привода подъем ной лебедки, регулятор, датчик и задатчики начального и конечного на.яжения подъемных канатов, датчик и задатчик пути копания, два сумматора и блок умножения с соответству ющими связями, устройство, позволяет управлять процессом копания за счет регулирования натяжения подъемных канатов в функции пути копания ij . Недостатком устройства является то, что регулирование натяжения, подъемных канатов в функции пути ко пания осуществляется по жесткой программе, которая задается машинис .том вручную с помощью задатчиков начального и конечного натяжения подъемных канатов и задатчика пути копания. Если программа изменения натяжения в подъемных канатах установлена неверно, то эффективность процесса копания может оказаться недостаточной, что приводит к потер производительности драглайна. Наиболее близким к предлагаемому является устройство автоматического управления процессом копания драгла на, содержащее электроприводы подъем ной и тяговой лебедок, датчик скорости копания, выход которого подключен ко входу датчика пути копани датчик усилия тяговых канатов, первый вход которого соединен с выходом датчика пути копания. Устройств обеспечивает программное изменение натяжения подъемньах канатов в функции пути копания 2 . Недостатком известного устройств является то, что заданная программа регулирования усилия в подъемных канатах устанавливается вручную с помощью потенциометров установки релсимных параметров программного зада чика на основании оценки результатов пробных циклов копания. При этом трудно определить требуемую програм му изменения натяжения подъемных канатов, поскольку оценка эффективности процесса копания является субъективной, что приводит к увеличению времени и пути копания, а .сле довательно, к недостаточной эффектив ности процесса копания. Цель изобретения - повышение эффективности автоматического управления процессом копания за счет оптимизации программы регулирования натяжения подъемных канатов. Поставленная цель достигается тем, что устройство автоматического управления процессом копания драглайна, содержащее электропривод подъемной лебедки и электропривод тяговой лебедки, соединенный с датчиками усилия тяговых канатов и скорости копания, выход последнего через датчик пути копания соединен с одним из входов программного задатчика натяжения подъемных канатов, выход которого подключен к одному из входов регулятора натяжения подъемных канатов, другой вход которого соединен с выходом датчика натяжения подъемных канатов, а выход - с электроприводом подъемной лебедки, снабжено блоком оценки эффективности смежных циклов копания, блоком изменения программы регулирования натяжения подъемных канатов и блоком контроля эффективности копания, входы которого соединены соответственно с датчиками скорости копания и усилия тяговых канатов, а выход через последовательно соединенные блок оценки эффективности смежных циклов копания и блок изменения программы регулирования натяжения подъемных канатов подключен к другому входу программного задатчика натяжения подъемных канатов. На чертеже представлена блок-схема предлагаемого устройства. Драглайн состоит из ковша 1 с подъемными 2 и тяговыми 3 канатами. Устройство автоматического управления процессом копания драглайна содержит подземную лебедку 4 с электроприводом 5 и тяговую лебедку 6 с электроприводом 7. Электропривод 5 подъемной лебедки управляется регулятором 8 натяжения подъемных канатов, к которому подключены прогрс1ммный задатчик 9, содержащий потенциометры 10 и 11 и суммирукяций усилитель 12, и датчик 13.натяжения подъемных канатов. Ко входам блока 14 контроля эффективности копания 3 подключены выходы датчика 15 скорости копания и датчика 16 усилия тяговых канатов. Выход блока 14 контроля эффективности копания подключен ко входу блока 17 оценки эффективности смежных циклов копания, выход которого соединен со входом блока 18 изменения программы регулирования натяжения подъемных канатов. Первый вход программно го задатчика 9 соединен с выходом датчика 19 пути сопания, а второй с выходом блока 18 изменения программы регулирования натяжения подъемных канатов. Устройство работает следующим образом. Автоматическое управление копанием осуществляется за счет регулирования натяжения подъемных канатов в функции пути копания так, чтобы по мере наполнения ковша усилие подъемных канатов увеличивалось от некоторого начального значения, соответствующего, например, весу уп ряжи ковша. Для этого программньой задатчик 9 натяжения подъемных канатов (например суммирующий усилитель 12 с двумя входами) формирует задающий сигнал для регулятора 8 натяжения подъемных канатов, суммируя сигнал с выхода потенциометра 10, пропорциональный начальному усилению в подъемных канатах с сигналом на выходе потенциометра 11. Крутизна нарастания программы изменения натяжения.подъемных канатов определяется величиной сигнала с выхода датчика 19 пути копания и по ложением среднего вывода потенциометра 11, соединенного с блоком 18 изменения программы регулирования натяжения подъемных канатов (например с реверсивным шаговым двигателем с коммутатором). Изменение программы регулирования натяжения подъемных канатов осу ществляется блоком 18 после каждого цикла копания в соответствии со знаком сигнала на выходе блока 17 . оценки эффективности смежных циклов копания (например блок запоминания и операционный усилитель-сумматор). Выходной сигнал блока 17 соответств ет разности оценок, эффективности двух смежных циклов копания: оценка эффективности предыдущего цикла запоминается в блоке запоминания, а затем сравнивается в сумматоре с оценкой эффективности текущего цикла. При этом оценка эффективности отдельного цикла к-опания формируется блоком 14 контроля эффективности копания, входы которого соединены с датчиком 15 скорости копания .(например датчиком напряжения привода тяговой лебедки) и с датчиком 16 усилия тяговых канатов (например да чиком статического тока привода тяговой лебедки). Блок контроля эффективности копа ния может быть выполнен в виде блоков умножения и деления и двух интеграторов . На выходы блока умножения подаются сигналы, пропорциональ ные усилию и скорости тягового каната . Сигнал на выходе множительног блока, пропорциональный мгновенному значению мощности копания, поступает на вход первого интегратора, который выдает сигнал, соответствующий величине действительной работы копания. На вход.второго интегратора поступает сигнал эталонной мощности копания. Выходной сигнал второго интегратора пропорционален величине эффективной работы копания. Выходы интеграторов подключены к делительному блоку, на выходе которого формируется сигнал, соответствующий отношению действительной работы копания к эффективной. В качестве эффективного значения работы при копании может быть принята работа привода тяги со скоростью и усилием в тяговых канатах, соответствующих точке отсечки на механической характеристике привода тяговой ле бедки. Если сигнал на выходе блока 17оценки эффективности смежных цик-i лов копания положительный, то блок 18изменения программы регулирования натяжения подъемных канатов, выход которого механически связан с движком потенциометра 11 программного задатчика 9, увеличивает крутизну заданной программы в следующем цикле копания путем соответствующего перемещения движка потенциометра. Если сигнал на выходе блока 17 отрицательный, то блок 18 уменьшает крутизну заданной программы регулирования натяжения подъемных канатов в следующем цикле копания. Таким образом; предлагаемое устройство позволяет автоматически оптимизировать программу регулирования .натяжения подъемных канатов при управлении процессом копания. Применение устройства обеспечивает повышение эффективности автоматического управления процессом копания и производительности драглайна путем улучшения использования мощности электропривода копающего механизма. Экономический эффект от внедрения устройства автоматического управления процессом копания драглайна достигается за счет более рационального использования мощностей главных приводов и увеличения производительности драглайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Способ управления движением ковша драглайна при копании и устройство для его осуществления | 1986 |
|
SU1333745A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2283927C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2011 |
|
RU2457295C1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
УСТРОЙСТВО АВТСЖАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙ НА, содержащее электропривод подъемной лебедки и электропривод тяговой лебедки, соединенный с датчиками усилия тяговых.канатов и скорости копания, выход последнего,через датчик пути копания соединен с одним из входов программного задатчика натяжения подъемных канатов, выход которого подключен к одному из входов регулятора натяжения подъемных канатов, другой вход которого соединен с выходом датчика натяжения подъемных канатов, а выход - с электроприводом подъемной лебедки, о т личающееся тем, что, с целью повышения эффективности автоматического управления процессом копания за счет оптимизации программы регулирования Натяжения подъемных канатов, устройство снабжено блоком оценки эффективности смежных циклов копания, блоком изменения программы регулирования натяжения подъемныз канатов и блоком контроля эффективности копания, входы которого соединены соответственно с датчиками скорости копания и усилия тяговых канатов, а выход через последовательно соединенные блок оценки эффективности смежных циклов копания и блок изменения программы регулирования натяжения подъемных канатов подключен к другому входу программного задатчика натяжения :з подъемных канатов. 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 413878, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ломакин М.с; Автоматическое управление процессом копания мощного драглайна | |||
| - Известия ВУЗов | |||
| Горный журнал, 1980, № 1, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
