Изобретение относится к горной промышленности и может быть использовано для управления движением ковша экскаватора-драглайна.
Известно устройство для управления движением ковша экскаватора-драглайна, содержащее регулятор тока двигателя подъемной лебедки, датчик, задатчик, регулятор натяжения тягового каната, выход которого через блок согласования подключен к первому входу блока выделения сигнала управления двигателем подъемной лебедки, второй вход которого соединен с выходом регулятора тока двигателя подъемной лебедки, а выход блока выделения сигнала управления подключен к входу генератора тока электропривода подъема [1].
Устройство позволяет снизить нагрузки механизма тяговой лебедки драглайна, возникающие в режимах, близких к стопорным, за счет увеличения натяжения подъемного каната в зависимости от выходного сигнала регулятора натяжения тягового каната.
Недостатком этого устройства является то, что оно не обеспечивает ограничение максимального усилия в подъемном канате, возникающего в момент отрыва груженого ковша от поверхности забоя, при наличии слабины в подъемном канате.
Наиболее близким по технической сущности к предложенному устройству является устройство для управления движением ковша экскаватора-драглайна, содержащее двигатели подъемных и тяговых лебедок, регулятор тока двигателя подъемной лебедки, датчики натяжения подъемного и тягового канатов, первый регулятор натяжения подъемного каната, к входам которого подключены выходы датчика натяжения подъемного каната и задатчика натяжения этого каната, первый блок выделения сигнала управления двигателем подъемной лебедки, первый вход которого соединен с выходом первого регулятора натяжения подъемного каната, а выход этого блока подключен к входу генератора постоянного тока привода подъема [2].
Устройство позволяет ограничивать минимальные и максимальные усилия в подъемном и тяговом канатах, обеспечивая тем самым снижение динамических нагрузок в рабочем оборудовании, электроприводах и механизмах подъемной и тяговой лебедок драглайна, возникающих в них в процессе копания. Это устройство взято нами в качестве прототипа.
Недостатком данного устройства является то, что оно не позволяет обеспечить снижение нагрузок тягового механизма драглайна, возникающих при стопорении ковша или при его чрезмерном заглублении в грунт.
Задача изобретения - повышение надежности и долговечности рабочего оборудования электропривода и механизма тяговой лебедки путем снижения возникающих в них динамических нагрузок за счет регулирования натяжения подъемного каната в зависимости от усилия натяжения в тяговом канате. Такое регулирование натяжения подъемного каната обеспечивает обход ковшом труднопреодолимого препятствия и уменьшение величины срезаемой ковшом стружки грунта, что устраняет причину возникновения значительных нагрузок в тяговом механизме.
Это достигается тем, что устройство для управления движением ковша экскаватора-драглайна, содержащее двигатели подъемной и тяговой лебедок, регулятор тока двигателя подъемной лебедки, датчики натяжения подъемного и тягового канатов, первый регулятор натяжения подъемного каната, к входам которого подключены выходы датчика натяжения подъемного каната и задатчика натяжения этого каната, первый блок выделения сигнала управления двигателем подъемной лебедки, первый вход которого соединен с выходом первого регулятора натяжения подъемного каната, а выход этого блока подключен к входу генератора постоянного тока привода подъема, снабжено вторым регулятором натяжения подъемного каната и вторым блоком выделения сигнала управления двигателем подъемной лебедки, при этом один вход этого регулятора подключен к выходу датчика натяжения подъемного каната, а второй - к выходу датчика натяжения тягового каната через нелинейный элемент, причем к входам второго блока выделения сигнала управления двигателем подъемной лебедки подключены выходы второго регулятора натяжения подъемного каната и регулятора тока двигателя подъемной лебедки, а выход этого блока выделения сигнала соединен с вторым входом первого блока выделения сигнала управления двигателем подъемной лебедки.
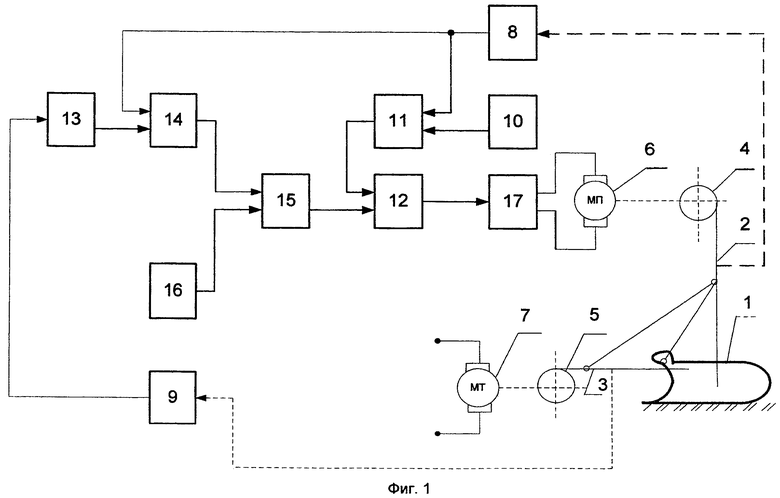
На фиг.1 представлена блок-схема предложенного устройства.
Устройство для управления движением ковша экскаватора-драглайна состоит из рабочего оборудования драглайна в виде ковша 1 с подъемным и тяговым канатами 2 и 3, подъемной и тяговой лебедок 4 и 5, механически связанных с двигателями 6 и 7 этих лебедок. Усилия натяжения подъемного и тягового канатов измеряют соответственно датчиками 8 и 9 натяжения канатов. Выход датчика 8 натяжения подъемного каната и задатчика 10 натяжения подъемного каната подключены к входам первого регулятора 11 натяжения этого каната, выход которого соединен с первым входом первого блока 12 выделения сигнала управления двигателем подъемной лебедки. Выход датчика 9 натяжения тягового каната через нелинейный элемент 13 подключен к одному из входов второго регулятора 14 натяжения подъемного каната, а другой вход соединен с выходом датчика 8 натяжения подъемного каната. При этом входы второго блока 15 выделения сигнала управления двигателем подъемной лебедки подключены к выходам второго регулятора 14 натяжения подъемного каната и регулятора 16 тока двигателя подъемной лебедки, а выход блока 15 - к второму входу первого блока 12 выделения сигнала управления двигателем подъемной лебедки, сигнал с выхода блока 12 поступает на вход генератора 17 постоянного тока привода подъемной лебедки.
Техническая реализация устройства для движения ковша экскаватора-драглайна может быть осуществлена на основании известных технических средств управления главными электроприводами экскаватора-драглайна. Нелинейный элемент 13 может быть реализован на основе операционного усилителя, на вход которого включена электрическая схема, формирующая нелинейную характеристику типа «зона нечувствительности». Блоки 12 и 15 выделения сигнала управления могут быть реализованы, например, в виде диодных схем выделения сигнала управления [2].
Устройство работает следующим образом.
В процессе копания величину усилия в подъемном и тяговом канатах измеряют датчиками 8 и 9 натяжения этих канатов. Выходное напряжение датчика 9 натяжения тягового каната, соответствующее усилию ST поступает на вход нелинейного элемента 13, реализующего характеристику типа «зона нечувствительности». Выходное напряжение нелинейного элемента 13 является задающим сигналом для второго регулятора 14 натяжения подъемного каната и изменяется в соответствии с следующим выражением:

где
 - максимальное напряжение на выходе нелинейного элемента 13, соответствующее усилию SП в подъемном канате, при котором
- максимальное напряжение на выходе нелинейного элемента 13, соответствующее усилию SП в подъемном канате, при котором
обеспечивается отрыв груженого ковша от поверхности забоя, например,
SП=1.1Gк.гр.;
G к.гр. - вес груженого ковша;
ST1 - усилие в тяговом канате, характеризующее величину «зоны нечувствительности» на характеристике U13(ST), например, ST1=0.9ST CT;
ST СТ - величина стопорного усилия в тяговом канате.
При усилиях в тяговом канате, меньших величины ST1,
напряжение на выходе нелинейного элемента 13 равно нулю. Под действием выходного напряжения датчика 8 натяжения подъемного каната напряжение на выходе второго регулятора 14 натяжения этого каната принимает отрицательное значение. Это напряжение поступает на первый вход второго блока 15 выделения сигнала управления двигателя подъемной лебедки, на второй вход которого поступает выходное напряжение регулятора 16 тока двигателя этой лебедки. Второй блок 15 выделения сигнала управления является блоком выделения наибольшего сигнала, и его выходное напряжение изменяется в соответствии с следующим выражением:

При отсутствии перегрузок тягового механизма (SТ<SТ1) выходное напряжение U16 регулятора 16 тока двигателя подъемной лебедки по алгебраической величине больше выходного напряжения второго регулятора 14 натяжения подъемного каната (при копании напряжение U16 имеет «положительное» значение, это же напряжение имеет «отрицательное» значение при вытравливании подъемного каната).
Поэтому напряжение на выходе второго блока 15 выделения сигнала управления двигателем подъемной лебедки в соответствии с выражением (2) принимает значение U15=U16.
При появлении перегрузок в тяговом механизме (ST≥ST1) на выходе нелинейного элемента 13 появляется напряжение  .
.
Под действием этого напряжения выходное напряжение U14 второго регулятора 14 натяжения подъемного каната принимает максимальное «положительное» значение и становится больше напряжения U16 (напряжение на выходе регулятора 16 тока двигателя подъемной лебедки принимает максимальное положительное значение при подъеме ковша с номинальной скоростью). Напряжение на выходе второго блока 15 выделения сигнала управления двигателем подъемной лебедки принимает значение U15=U14 Это напряжение направлено на увеличение натяжения подъемного каната для устранения перегрузок в тяговом механизме.
На входы первого блока 12 выделения сигнала управления двигателем подъемной лебедки поступают напряжения с выходов первого регулятора 11 натяжения подъемного каната и второго блока 15 выделения сигнала управления этим двигателем. Блок 12 обеспечивает выделение наименьшего сигнала, и его выходное напряжение изменяется в соответствии с следующим выражением:

где
SП1 - заданное максимальное усилие в подъемном канате, например,
SП1=0.9SП CT;
SП СТ - стопорное усилие в подъемном канате.
Напряжение задания для первого регулятора 11 натяжения подъемного каната, соответствующее величине SП1, устанавливается на выходе задатчика 10 натяжения подъемного каната. При отсутствии перегрузок в подъемном канате (SП<SП1) напряжение на выходе первого регулятора 11 натяжения подъемного каната под действием напряжения U10>U8 принимает максимальное «положительное» значение. При этом напряжение на выходе второго блока 15 выделения сигнала управления двигателем подъемной лебедки меньше напряжения на выходе первого регулятора 11 натяжения подъемного каната. В соответствии с выражением (3) первый блок 12 выделения сигнала управления двигателем подъемной лебедки обеспечивает подключение на вход генератора 17 постоянного тока привода подъема наименьшего сигнала, т.е. напряжения U15.
При возникновении перегрузок в механизме подъемной лебедки (SП≥SП1) выходное напряжение первого регулятора 11 натяжения подъемного каната принимает «отрицательное» значение, так как U8>U10. Напряжение U11 становится меньше выходного напряжения U15 второго блока 15 выделения сигнала управления двигателем подъемной лебедки. Первый блок 12 выделения наименьшего сигнала управления двигателем подъемной лебедки обеспечивает отключение от входа генератора 17 постоянного тока привода подъема выходного напряжения второго блока 15, так как оно направлено на создание перегрузок в механизме подъема и подключение вместо него выходного напряжения первого регулятора 11 натяжения подъемного каната. Под действием этого напряжения производится устранение перегрузок подъемного механизма и усилие в подъемном канате ограничивается допустимой величиной SП=SП1.
В соответствии с выражениями (2, 3) алгоритм изменения напряжения на входе генератора 17 постоянного тока привода подъемной лебедки имеет следующий вид:

Если в механизмах подъемной и тяговой лебедок драглайна перегрузки отсутствуют, то на вход генератора 17 постоянного тока привода подъемной лебедки подключается выходное напряжение U16 регулятора 16 тока двигателя подъемной лебедки. При возникновении перегрузок в тяговом механизме и отсутствии перегрузок в подъемном механизме на вход генератора 17 постоянного тока привода подъемной лебедки подключается выходное напряжение U14 второго регулятора 14 натяжения подъемного каната, под действием которого обеспечивается увеличение натяжения каната, за счет чего осуществляется обход ковшом труднопреодолимого препятствия и уменьшение толщины срезаемой ковшом стружки грунта во избежание чрезмерного его заглубления в грунт. Этим устраняются причины возникновения перегрузок в тяговом механизме.
Если в механизме подъема возникают перегрузки, то на вход генератора 17 постоянного тока привода подъемной лебедки будет подключено напряжение с выхода первого регулятора 11 натяжения подъемного каната, под действием которого нагрузки подъемного механизма будут ограничены на заданном уровне.
Предложенное устройство обеспечивает увеличение натяжения подъемного каната в зависимости от усилия в тяговом канате для устранения перегрузок в тяговом механизме при условии отсутствия перегрузок в подъемном механизме.
Таким образом, устройство для управления движением ковша экскаватора-драглайна обеспечивает снижение нагрузок в рабочем оборудовании, электроприводах и механизмах подъемной и тяговой лебедок, а следовательно, позволяет повысить их надежность и долговечность.
Источники информации
1. Авт.свид. №1659598 по кл. E02F 3/48. Бюл. №24, 1991 г.
2. Авт.свид. №1425276 по кл. E02F 3/48. Бюл. №35, 1988 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2283927C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Способ управления движением ковша драглайна при копании и устройство для его осуществления | 1986 |
|
SU1333745A1 |
Изобретение относится к горной промышленности и может быть использовано для управления движением ковша экскаватора-драглайна. Техническим результатом является повышение надежности и долговечности рабочего оборудования. Устройство для управления движением ковша экскаватора-драглайна содержит двигатели подъемной и тяговой лебедок, датчики натяжения подъемного и тягового канатов. Кроме того, устройство содержит первый регулятор натяжения подъемного каната, первый блок выделения сигнала управления двигателем подъемной лебедки, а также второй регулятор натяжения подъемного каната и второй блок выделения сигнала управления двигателем подъемной лебедки. При этом к входам первого регулятора натяжения подъемного каната подключены выходы датчика и задатчика натяжения этого каната. Первый вход первого блока выделения сигнала управления двигателем подъемной лебедки соединен с выходом первого регулятора натяжения подъемного каната, а выход этого блока подключен к входу генератора постоянного тока привода подъемной лебедки. Кроме того, первый вход второго регулятора натяжения подъемного каната подключен к выходу датчика натяжения подъемного каната, а второй - к выходу датчика натяжения тягового каната через нелинейный элемент. Причем к входам второго блока выделения сигнала управления подключены выходы второго регулятора натяжения подъемного каната и регулятора тока двигателя подъемной лебедки. А выход второго блока выделения сигнала управления соединен со вторым входом первого блока выделения сигнала управления двигателем подъемной лебедки. 1 ил.
Устройство для управления движением ковша экскаватора-драглайна, содержащее двигатели подъемной и тяговой лебедок, регулятор тока двигателя подъемной лебедки, датчики натяжения подъемного и тягового канатов, первый регулятор натяжения подъемного каната, к входам которого подключены выходы датчика натяжения подъемного каната и задатчик натяжения этого каната, первый блок выделения сигнала управления двигателем подъемной лебедки, первый вход которого соединен с выходом первого регулятора натяжения подъемного каната, а выход этого блока подключен к входу генератора постоянного тока привода подъема, отличающееся тем, что оно снабжено вторым регулятором натяжения подъемного каната и вторым блоком выделения сигнала управления двигателем подъемной лебедки, при этом один вход этого регулятора подключен к выходу датчика натяжения подъемного каната, а второй - к выходу датчика натяжения тягового каната через нелинейный элемент, причем к входам второго блока выделения сигнала управления двигателем подъемной лебедки подключены выходы второго регулятора натяжения подъемного каната и регулятора тока двигателя подъемной лебедки, а выход этого блока выделения сигнала соединен со вторым входом первого блока выделения сигнала управления двигателем подъемной лебедки.
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| КОМБИНИРОВАННЫЙ ФЛЮС ДЛЯ ПЛАВКИ ЛАТУНЕЙ | 1995 |
|
RU2081928C1 |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ПОЛУЧЕНИЯ ЛЕГКОГО ПОРИСТОГО ЗАПОЛНИТЕЛЯ | 2009 |
|
RU2394782C1 |

