Изобретение относится к горной промышленности и может быть использовано для управления рабочим оборудованием экскаватора-драглайна.
Цель изобретения - повышение надеж- 5 ности и долговечности электропривода и механизма тяговой лебедки за счет снижения их динамических нагрузок.
На чертеже представлена блок-схема предлагаемого устройства.10
Устройство для управления движением ковша экскаватора-драглайна включает рабочее оборудование в виде ковша 1 с подъемными 2 и тяговыми 3 канатами, подъемную лебедку 4 и тяговую лебедку 5, 15 соединенную с двигателем 6, который управляется от блока 7 регулирования скорости тяговой лебедки. К входу этого блока 7 подключен выход блока 8 задания скорости копания, который может быть выполнен, на- 20 пример, в виде сумматора 9, содержащего в цепи обратной связи последовательно соеиненные звено 10 ограничения и управляемый ключ 11. Первый вход блока 8 задания скорости копания (вход сумматора 9), через 25 контакты 15 и 16 первого 12 и второго 13 управляемых ключей и задатчик 17 интенсивности скорости тяговой лебедки подключен к выходу блока 20 выделения сигнала управления электроприводом тяги. Второй 30 вход блока 8 задания скорости копания (также вход сумматора 9) подключен к выходу этого блока 20 через контакты 15 и 18 первого 12 и второго 13 управляемых ключей. Третий вход блока 8 задания скорости копания (уп- 35 равляющий вход ключа 11) подключен к выходу второго компаратора 19. К входам блока 20 выделения сигнала управления электроприводом тяги подключены задатчик 21 скорости тяговой лебедки и регулятор 40 22 натяжения тяговых канатов, входы которого соединены с выходами задатчика 23 и датчика 24 натяжения тяговых канатов. Первый ключ 12 управляется от первого компаратора 25, входы которого подключены к 45 выходам задатчика 26 и датчика 27 натяжения подъемных канатов. Управляющий вход второго ключа 13 соединен через нелинейный элемент 28 с выходом задатчика интенсивности скорости тяговой лебедки и через 50 контакты 29 и 30 подключен к источнику 31 опорного напряжения. Входы второго компаратора 19 соединены с выходами задатчика 23 и датчика 24 натяжения тяговых канатов.55
Устройство работает следующим образом.
Машинист управляет движением ковша с помощью задатчика 21 скорости тяговой лебедки, выходной сигнал которого и выходной сигнал регулятора 22 натяжения тяговых канатов поступает на входы блока 20 выделения сигнала управления электроприводом тяги, являющегося блоком выделения наименьшего сигнала. На первом выходе задатчика 23 натяжения тяговых канатов - устанавливается их заданное натяжение стабилизации, равное, например, 0,9-0,95 от стопорной величины усилия. При усилии в тяговых 3 канатах, меньшем заданного значения стабилизации, выходной сигнал блока 20 выделения сигнала управления электроприводом тяги соответствует выходному сигналу задатчика 21 скорости тяговой лебедки, так как этот сигнал меньше выходного сигнала регулятора 22 натяжения тяговых канатов, Если слабина в подъемных канатах отсутствует, то выходной сигнал задатчика 26 меньше выходного сигнала датчика 27 натяжения подъемных канатов. На выходе первого компаратора 25 имеется управляющий сигнал и контакты 15 и 29 первого ключа 12 замкнуты.
Через замкнутые контакты 15 и 18 ключей 12 и 13 сигнал с выхода блока 20 выделениясигналауправленияэлектроприводом тяги поступает на второй вход блока 8 задания скорости копания, выход которого соединен с входом блока 7 регулирования скорости тяговой лебедки. При этом управление электроприводом тяги обеспечивается в соответствии с сигналами задатчика 21 скорости тяговой лебедки.
При появлении слабины в подъемных канатах выходной сигнал задатчика 26 становится больше выходного сигнала датчика 27 натяжения подъемных канатов. Выходной сигнал компаратора 25 становится равным нулю. Контакты 15 и 29 первого ключа 12 размыкаются, что приводит к отключению выходного сигнала блока 20 выделения сигнала управления электроприводом тяги и, кроме того, к отключению источника 31 опорного напряжения от управляющего входа второго ключа 13. При этом контакты 18 и 30 этого ключа 13 размыкаются, а его контакты 16 замыкаются, В результате обеспечивается блокировка (отключение) задающего сигнала от блока 7 регулирования скорости тяговой лебедки, которая при слабине в подъемных канатах останавливается.
После устранения слабины в подъемных канатах сигнал задатчика 26 становится меньше сигнала датчика 27 натяжения подъемных канатов и с выхода компаратора 25 к первому ключу 12 подводится напряжение управления. Контакты 15 и 29 первого ключа 12 замыкаются. Выходной сигнал блока 20 выделения сигнала управления электроприводом тяги поступает через замкнутые контакты 15 первого ключа 12 и замкнутый контакт 16 второго ключа 13 первого ключа 12 и замкнутый контакт 16 второго ключа 13 на вход задатчика 17 интенсивности, который обеспечивает преобразование входного сигнала в линейно изменяющийся во времени сигнал на выходе. Через блок 8 задания скорости копания сигнал с выхода задатчика 17 интенсивности поступает на вход бло- ка 7 регулирования скорости тяговой лебедки. В результате этого после устранения слабины в подъемных канатах и снятия блокировки с сигнала заданной скорости обеспечивается разгон электропривода тя- говой лебедки с заданной интенсивностью.
Выходное напряжение задатчика 17 интенсивности поступает на вход нелинейного элемента 28. Ппи выходном сигнале задэгчика 17 интенсивности, соответствую- щем заданию скорости электропривода тяги значения, равного, например, 0,5-0,6 от ее номинальной величины на выходе нелинейного элемента 28 появляется напряжение, поступающее на управляющий вход второго ключа 13. В результате контакты 18 и 30 зтого ключа 13 замыкаются, а его контакты 16 размыкаются, При этом выход блока 20 выделения сигнала управления электроприводом тяп, отключается от входа задатчика 17 интенсивности и подключается к второму входу блока 8 задания скорости копания. Кроме того, одновременно с замыканием контакта 30 второго ключа 13 к его управляющему входу подключается ис- точник 31 опорного напряжения, что удерживает этот ключ 13 в состоянии, когда его контакты 18 и 30 замкнуты, а контакт 16 разомкнут. Дальнейшее управление электроприводом тяги осуществляется без пре- образования задающего сигнала задатчиком на основании сигнала, который не преобразуется задатчиком интенсивности скорости тяговой лебедки.
На втором выходе задатчика 23 натяже- ния тяговых канатов устанавливается сигнал, соответствующий 0,8-0,85 стопорной величины усилия. При усилии в тяговых канатах, большем этого значения , выходной сигнал датчика 24 становится больше сиг- нала, установленного на втором выходе задатчика 23 натяжения подъемных тяговых канатов. На выходе второго компаратора 19 появляется напряжение, которое поступает через третий вход блока 8 задания скорости копания на управляющий вход ключа 11. Контакты этого ключа 11 замыкаются, в результате з цепь обратной связи сумматора 9 подключается звено 10 ограничения. Это приводит к ограничению выходного напряжения блока задания 8 скорости копания величиной, соответствующей 40-50% от номинального значения скорости электропривода тяги. Таким образом, при усилиях в тяговых канатах, близких к стопорным, обеспечивается автоматическое снижение заданной скорости копания, Если усилие в тяговых канатах становится больше заданного уровня стабилизации, установленного на первом выходе задатчика 23 натяжения тяговых канатов, то выходной сигнал регулятора 22 натяжения канатов становится меньше выходного сигнала задатчика 21 скорости тяговой лебедки. Выходной сигнал блока 20 выделения сигнала управления электроприводом тяги становится равным выходному сигналу регулятора 22 натяжения тяговых канатов. Этот сигнал подключается на вход блока 7 регулирования скорости копания, в результате чего обеспечивается стабилизация заданного натяжения тяговых канатов.
Таким образом, предлагаемое устройство позволяет обеспечить разгон электропривода тяги с заданной интенсивностью после снятия блокировки с сигнала заданной скорости этого электропривода при устранении слабины в подъемных кзнатах и, кроме того, обеспечить автоматическое снижение этого сигнала при нагрузках тягового механизма, близких к стопорным. Формула изобретения Устройство для управления движением ковша экскаватора-драглайна, содержащее задатчик натяжения тяговых канатов, первый выход которого соединен с одним из входов регулятора натяжения тяговых канатов, второй вход которого соединен с выходом датчика натяжения тяговых канатов, выход регулятора натяжения тяговых канатов и выход задатчика скорости тяговой лебедки подключены к входам блока выделения сигнала управления электроприводом тяги, выход которого соединен с одним из входов первого ключа, другой вход которого соединен с выходом источника опорного напряжения, а управляющий вход ключа соединен с выходом компаратора, входы которого соединены соответственно с выходами задатчика натяжения подъемных канатов и датчика натяжения подъемных канатов, задатчик интенсивности скорости тяговой лебедки и блок регулирования этой скоростью, отличающееся тем, что, с целью повышения надежности электропривода и механизма тяги экскаватора-драглайна за счет снижения их динамических нагрузок, оно снабжено блоком задания скорости копания, вторым ключом, вторым компаратором и нелинейным элементом, при этом блок задания скорости копания выполнен их трехвходового сумматора, элемента нелинейности и управляемого ключа, при этом в у ход сумматора через управляемый ключ и элемент нелинейности соединение первым входом сумматора, второй и -третий входы которого являются соответственно первыми и вторыми входами блока задания скорости копания, а управляющий вход управляемого ключа является третьим входом блока задания скорости копания, первый выход первого ключа соединен с первым входом второго ключа, а второй выход первого ключа соединен с вторым и третьим входами второго ключа, первый выход второго ключа соединен с уп- равляюидем входом второго ключа, второй
5
выход второго ключа соединен с входом за датчика интенсивности скорости тяговой лебедки, а третий выход второго ключа соединен с вторым входом блока задания скорости копания, выход задатчика интенсивности скорости тяговой лебедки соединен с первым входом блока задания скорости копания и входом блока нелинейности, выход которого соединен с управляющим входом второго ключа, второй выход задатчика натяжения тягового каната и выход датчика натяжения тяговых канатов соединены с входами второго компаратора, выход которого соединен с третьим входом блока задания скорости копания, выход которого соединен с входом блока регулирования скорости тяговой лебедки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659598A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
Изобретение относится к горной промети и м.б. использовано для управления рабочим оборудованием экскаватора-драглайна. Цель- повышение надежности электропривода и механизма тяги экскаватора-драглайна за счет снижения их динамических нагрузок. Устройство содержит блок 7 регулирования скорости тяговой лебедки (ТЛ) 5. блок 8 задания скорости копания, содержа- щийсммуторЭ, в цепь обратной связи которого включено звено 10 ограничителя, управляемые ключи 11-13, задатчик 17 интенсивности скорости ТЛ 5, компаратор 19, блок 20 выделения сигнала управления электроприводом тяги, задатчик 21 скорости тяги, регулятор 22 и задатчик 23 натяжения тяговых канатов (ТК) 3, задатчик 26 и датчик 27 натяжения подъемных канатов (ПК) 2, нелинейный элемент 28 и источник 31 опорного напряжения. Управление осуществляется задатчиком 21. блок 20 выделяет наименьший сигнал. При появлении слабины в ПК 2 выходной сигнал задатчика 26 становится больше сигнала датчика 27, В результате размыкаются цепи ключа 12 и обеспечивается блокировка задающего сигнала от блока 7. При этом ТЛ 5 останавливается. После устранения слабины в ПК 2 сигнал задатчика 26 становится меньше сигнала датчика 27. Ключи 12 замыкаются и через блок 8 сигнал подается на вход блока 7. В результате обеспечивается разгон электропривода ТЛ 5 с заданной интенсивности. При усилии в ТК 3 больше заданного значения сигнал выхода датчика 24 становится больше сигнала с выхода задатчика 23. Таким образом, при усилиях в ТК 3, близких с заданным (стопорным), обеспечивается автоматическое снижение заданной скорости копания. Происходит стабилизация заданного натяжения ТК 3. 1 ил. СП с о ел о ел о ю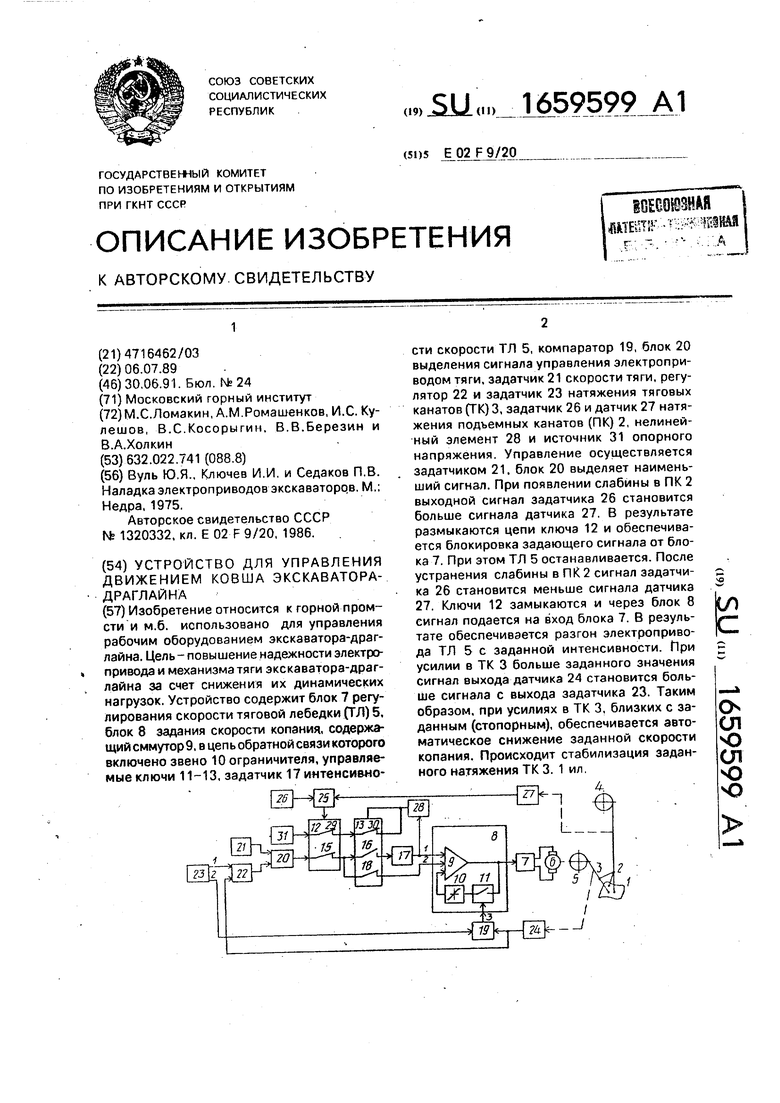
| Буль Ю.Я., Ключев И.И | |||
| и Седаков П.В | |||
| Наладка электроприводов экскаваторов | |||
| М.; Недра, 1975 | |||
| Стыковое соединение секций сборной железобетонной сваи | 1986 |
|
SU1320332A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
