Изобретение относится к измерите ной технике и может быть использова но для опреде.ления магнитного, момен та дипольнрго источника поля и коор динат точки приложения этого момент например, в геофизике для проведет ния магнитно-разведочных работ, в судостроительной промышленности ;Для обеспечения навигационного оборудования, в медицине для диагностики и лечения и . Известен способ определения направления перемещения источника магнитного поля, который позволяет измерить составляющие магнитного поля в точке измерения и по ним определить в упомянутой точке направление результирующего вектора магнитного поля, изменение которого указывает перемещение или изменение положения источника, магнитного поля ij . Однако указанный способ не обеспечивает возможности определения как координат дипольного источника магнитного поля, так и магнитного момента данного источника. Известен также способ определе.ния магнитного момента дипольнрго источника поля и координат точ-/ ки приложения этого момента, основа ный на измерении в каждой из четыре точек пространства, расположенныл н одной оси, трех компонент вектора магнитной индукции и одновременном определении сумм квадратов разностей компонент векторов магнитной ин дукции между двумя крайними указанными точками пространства, образующими одну пару точек наблюдения, и между двумя другими крайними указанными точками пространства,, образую щими вторую пару точек наблюдения, при вращении данной оси сначала в одной плоскости до получения максимального значения суммы квадратов ра эностей компонент векторов магнитной индукции между точками пространства одной из пар (например, первой) а затем вращение этой же оси в плоскости, которая ортогональна первой плоскости вращения, до получений мак симального значения суммы квадратов разностей компонент векторов магнитной индукции между точками пространства этой же пары (первой пары). В этом случае считают, что дипольный источник-днаходитгя ria указанной оси в.направлении от второй пары точек наблюдения к первой, а расстояние до этого дипольного источника определяет из соотношения, связывающего данное расстояние до дипольного источника поля с расстоянием между первой и второй парами точек наблюдения и отношением сумм квадратов разностей компонент векторов магнитной индукции между точками простраиства первой и второй пары. Зная направление на дипольный ..источник маг- нитного поля и расстояние до этого источника, а также значение разностей компонент векторов магнитной индукции между точками пространства первой и второй пар, определяют компоненты вектора магнитного момента , данного дипольного источника 2 . Недостатком из.вестного способа является низкая точность определения направления на дипольный источник, что снижает точность определения координат и магнитного момента данного дипольного источника.. Это обусловлено тем, что максимальное значение суммы квадратов разностей компонент векторов магнитной индукции между двумя точками пространства зависит не только от расстояния от точки наблюдения до дипольного источника поля, но и от угла мезкду радиусом в.ектором дипольного источника и направлением вектора магнитного момента данного источника. Кроме того, способ характеризуется низкой точностью определения разности компонент векторов магнитной индукций дипольного источника поля, обусловленная влиянием сильного однородного магнитного поля, например гес 1агнитного, на магниточувствительные преобразователи, и низкой точностью определения расстояния до дипольного источник поля, обусловленной конечными линейными расстояниями между каждой парой точек. Так, лри расстоянии от дипольного источника поля до одной из упомянутых четырех выбранных точек пространства, соизмеримом с расстоянием между точками пространства одной из пар, погрешность определения магнитного момента дипольного источника поля и координат точки приложения этого момента может-быть более , 100%.: Цель изобретения - повышение точности определени магнитного момента дипольного источника поля и координат точки приложения этого момента. Поставленная цель достигается тем, что согласно способу определения магнитного момента дипольного источника поля и координат точки приложения этого момента, основанному на измерении в калдой Из трех эыбраиных точек пространства трех компонент йектора магнитной индукции,одновременно.измеря1от магнитный момент дипольнюго источника поля, координаты точки приложения этого момента и компоненты вектора однородного магнитного поля по местоположению указанных точек пространства неизмеренным компонентам векторов магнйтнойииндукции в этих точках, а затем по каждой из найденных компонент воспроизводят магнитно пол, равное по величине, но противо положное по направлению соответствую щей компоненте вектора однородного магнитного поля, и по вновь измеренHfcjM компонентам векторов магнитной индукции в данных точках пространства и местоположению этих точек определяют магнитный момент дипольнбго источника поля, координаты точки при ложения этого, момента; и компоненты вектора однородного магнитного поля, при-этом все три указанные точки, выбирают в пространстве произвольно. Измерение трех компонент вектора магнитной индукции в каждой из трех произвольно выбранных точках пространства позволяет определить направление векторов магнитной индукции в указанных точках, . Задаются начальные условия, в частности координаты дипольного источника поля, например, на направ лении вектора магнитной индукции в первой точке пространства. По начал ным условиям и измеренным компонентам .векторов магнитной индукции.лв первой и второй точках пространства определяют компоненты вектора однородного магнитного поля. За- тем изменяют масштаб измеренных ком понент векторов магнитной индукции . в указанных точках- пространства с учетом исключения компонент вектора однородного магнитного поля, т.е. изменяют масштаб -векторов магнитной индукции в данных точках пространства и осуществляют поворот этих векто ров на один и тот же угол. После -ЭТОГО определяют вектор магнитной индукции в третьей точке пространства и яравнивают его по величине и направлению с вектором магнитной индукции, полученным по измеренным компонентам в этой же точке пространства. В результате сравнения получают разностный вектор магнитной индукции, который определяет погрешность, обусловленную .выбором начальных параметров (расстояние до дипольного источника и направление на него), методом минимизации умень шают разностный вектор, приближая тем самым определяемые параметры .Направление на дипольный. источник поля, расстояйие до него и компонен ты вектора однородного магнитного поля) к истинным. Одновременно с,на хождением координат дипольного исто ника поля (точки приложения дипольного магнитного момента) и компонен вектора однородного магнитного поля определяют и компоненты вектора маг нитного момента, дипольного источника. При в каждой из тгрех указанных точек пространства по каждрй из найденных компонент однородного магнитного поля воспроизводят магнитное поле, равное по величине, но противоположное по направлению соответствующей компоненте вектора однородного магнитного поля, т.е. в каждой из указанных точек пространства осуществляют автокомпенсацию вектора однородного магнитного поля. Это позволяет повысить точность измерения параметров магнитного поля, созданных дипольным источником на фоне указанного однородного поля, например геомагнитного, которое часто значительно больше поля дипольного источника в -выбранных точках, что обеспечивает повышение точности определения магнитного момента данного источника и координат точки приложения этого момента. На фиг.1 изображены точка приложения дипольного магнитного момента, представленного в виде компонент, и три точки пространства, в каждом из которых измеряют три компоненты вектора магнитного поля, ,на фиг.2 структурная схема устройства для осуществления предлагаемого способа. Согласно способу (фиг.1) в точке 1 пространства измеряют- компоненты вектора магнитной индукции В , Вц, Bj , в точке 2 пространства - компоненты вектора магнитной индукции BXJ jz Bj.j и в точке 3 пространства - компоненты вектора магнитной индукции BX, Bij, В,;.,. Дипольный магнитный момент источника поля,, представленный в виде компонент : Мх, М, Mj-, приложена , в точке А с координатами. Xo,iojbo Составляющие вектора магнитной индукции в трех точках пространства можно представить как функцию производных магнитнь1Х потенциалов по координатам в точках 1-3 пространства и компонент вектора однородного магнитного поля . ах ., ,-р.о1.в в.... 8гГ-То| в Вп-,, В,.-|и,Д±%в
e:,. ,
где (fi 1 (f3 скалярные магнитные потенциалы в трех точках прос транства,: каждая из которых является функцией магнитйого момента и координат ДИПОЛЬНОГО
источника поля;
,0 и/м- магнитная постояннаяВц , компоненты, вектора
однородного магнитНОГО ПОЛЯ.
Система этих девяти уравнений с девятью неизвептньлии имеет однозначное решение, т.е. кгокдая компонента магнитного момента, каждая координата точки приложения этого момента и каждая компонента однородного магнитного поля имеют одно действительное значение.
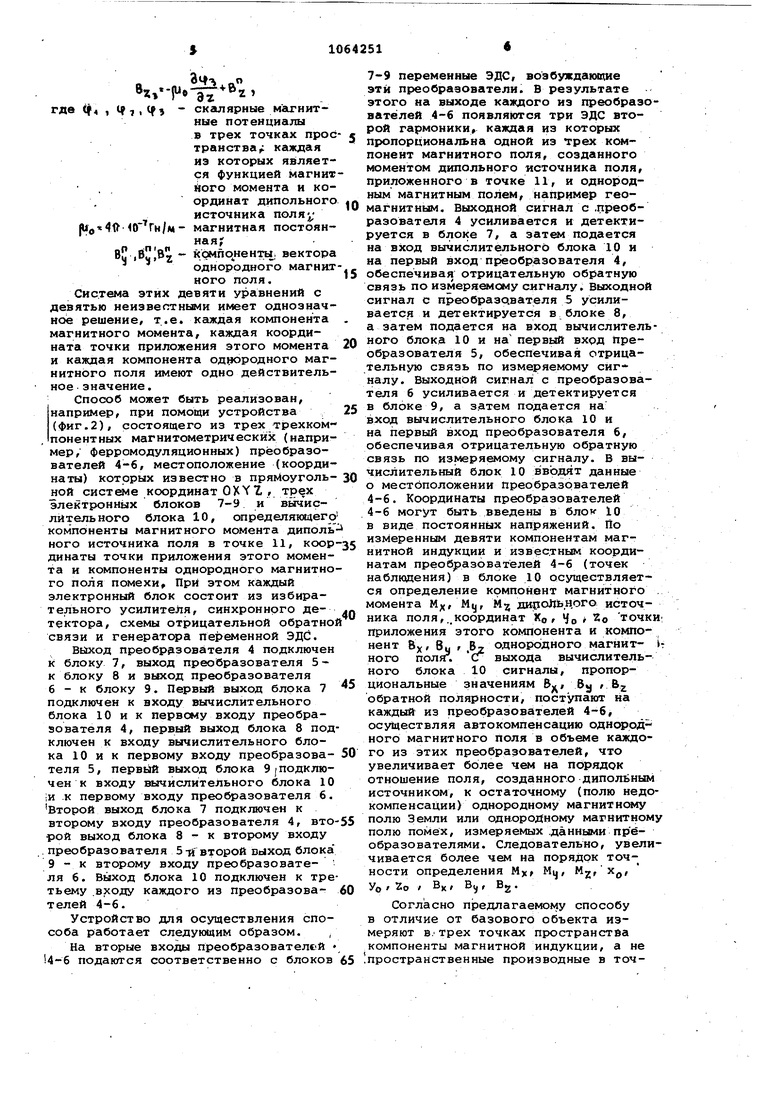
Способ может быть реализован, например, при помощи устройства (фиг,2), состоящего из трех трехком понентных магнитометрических (например, ферромодуляционных) преобразователей 4-6, местоположение (координаты) которых известно в пряМоугольной системе координат ОХYl , трех электронных блоков 7-9 и вычислительного блока 10, определяющего компоненты магнитного момента дипольНОГО источника поля в точке 11, коор динаты точки приложения этого момента и компоненты однородного магнитного поля помехи. При этом каждый электронный блок состоит из избирательного усилителя, синхронного детектора, схемы отрицательной обратно связи и генератсфа переменной ЭДС.
Вькод преобразователя 4 подключен к блоку 7, выход преобразователя 5к блоку 8 и выход преобразователя 6 - к блоку 9. Первый выход блока 7 подключен к входу вычислительного блока 10 и к первому входу преобразователя 4, первый выход блока 8 подключен к входу вычислительного блока 10 и к первому входу преобразователя 5, первый выход блока 9|подключен к входу вычислительного блока 10 |и к первому входу преобразователя 6. Второй выход блока 7 подключен к второму входу преобразователя 4, вто рой выход блока 8 - к второму входу преобразователя 5-й второй выход блока 9 - к второму входу преобразователя 6. Выход блока 10 подключен к третьему .входу каждого из преобразователей 4-6.
Устройство для осуществления способа работает следующим образом. , На вторые входы преобразователей U-6 подаются соответственно с блоков
7-9 переменные ЭДС, возбуждающие эти преобразователи. В результате этого на выходе каждого из преобразователей 4-6 появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех компонент магнитного поля, созданного моментом ДИПОЛЬНОГО источника поля, приложенного в точке 11, и однородным магнитным полем, например геомагнитным. Выходной сигнал с .преобразователя 4 усиливается и детектируется в блоке 7, а затем подается на вход вычислительного блока 10 и на первый вход преобр513ователя 4, обеспечивая отрицательную обратную связь по измеряемому сигналу. Выходной сигнал с преобразователя 5 усиливается и детектируется в. блоке 8, а затем подается на вход вычислительного блока 10 и на первый вход Преобразователя 5, обеспечивая отрицательную связь по измеряемому сиг налу. ВЫХОДНОЙ сигнал с преобразователя 6 усиливается и детектируется в блоке 9, а з.атем подается на вход вычислительного блока 10 и на первый вход преобразователя 6, обеспечивая отрицательную обратную связь по измеряемому сигналу. В вычислительный блок 10 вводят данные о местоположении преобразователей 4-6. Координаты преобразователей 4-6 могут быть введены в блок Ю в виде постоянных напряжений. По измеренным девяти компонентам магнитной индукции и известным координатам преобразователей 4-6 (точек наблюдения) в блоке 10 осуществляется определение компонент магнитного момента Mj, My, М дироЛьн.ого источника пол я,. координат Хо , Jo 2о точк приложения этого компонента и компонент 8j(, By , BZ однородного магнитНОГО . сГ выхода вычислительного блока 10 сигналы, пропорциональные значениям &, By , В обратной полярности, поступают на каждый из преобразователей 4-6, осуществляя автокомпенсацию одиаррп НОГО магнитного поля в объеме каждого из этих преобразователей, что увеличивает более чем на порядок отношение поля, созданного диполйным источником, к остаточному (полю недокомпенсации) однородному магнитному полю Земли или однородному магнитном полю помех, измеряемых .данными прёобразователями. Следовательно, увеличивается более чем на порядок точ- ности определения MX Мц, М-,, х, УО 2о / BK В(, Bg .
Согласно предлагаемому способу в отличие от базового объекта измеряют в. трех точках пространства компоненты магнитной индукции, а не 1пространственные производные в точке наблюдения. Поэтому при предлагаемом способе отсутствует погрешность определения пространственных производных магнитного поля, которая обусловлена конечньти размерами
расстояний между точками измерения, что повышает точность определения магнитного кюмента дипольиого источника поля и координат точки его приложения.
СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА ДИПОЛЬНОГО ИСТОЧНИКА ПОЛ И КООРДИНАТ ТОЧКИ ПРИЛСЯКЕНИЯ ЭТОГО МОМЕНТА, основанный на измерении в каждой из трех выбранных точек пространства трех компонент вектора магнитной индукции, отличающийс .я тем, что, с целью повьанения точности, измерений, одновременно измеряют магнитный момент дипольного источника поля, координаты точки приложения этого момента к компоненты вектора однородного магнитного поля по / местоположению указанных точек простt aHCTBa и измеренным компрнентам векторов магнитной индукции в этих точках, а затем ло каждой из найденных компонент воспроизводят магнитное поле, равное по величине, но противоположное по направлению соответствующей компоненте вектора однородного магнитного поля, и по вновь измеренным компонентам векторов магнитной индукции в данных точках пространства и местоположению этих точек определяют Магнитный момент дипол| ного источника поля, координаты точки прк)1ожения этого момента и компо-j ненты вектора однородного магнитного (Л поля, при этом все три указанные точки выбирают в пространстве произвольно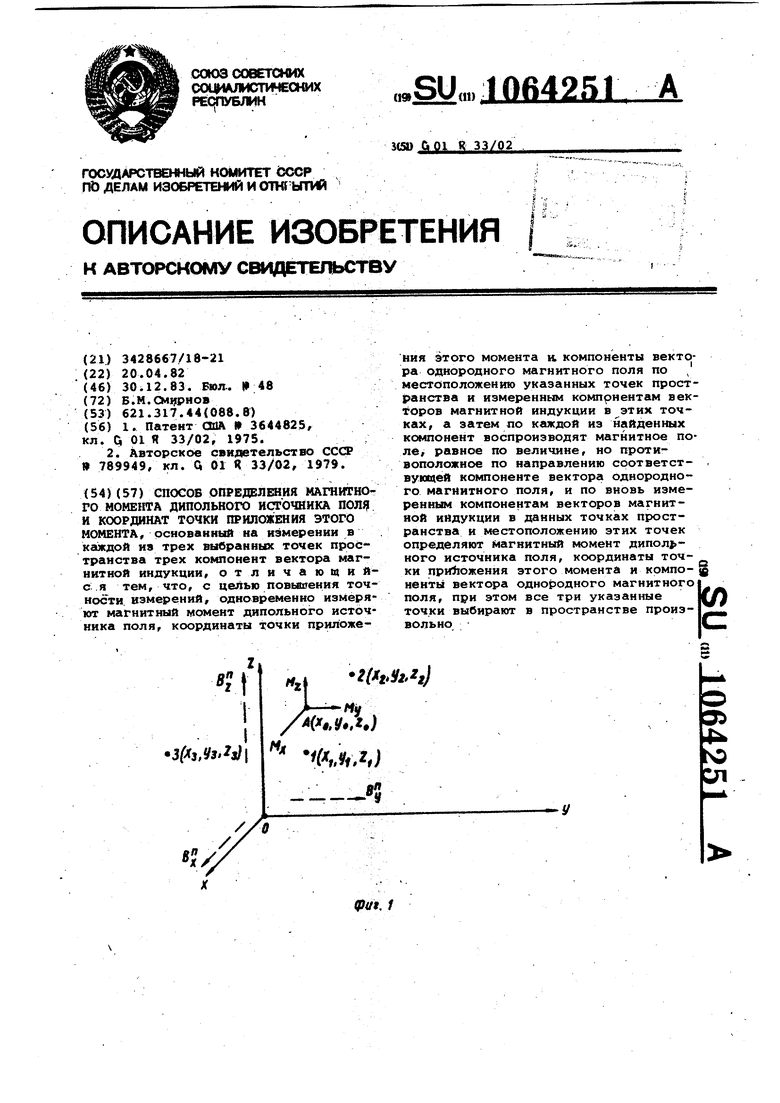
Mt
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3644825, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
