Изобретение относится к измерительной технике и может быть использовано для измерения деформаций немагнитных материалов.
Известно устройство (взято за прототип) для измерения толщины немагнитных материалов, содержащее измерительную головку с магнитом и размещенным на нем датчиком Холла, сигнальные электроды которого через усилитель подключены к индикатору, а токовые - к выходам блока питания, ферромагнитный элемент в виде шарика, располагаемого с противоположной стороны измеряемого материала. Шарик помещен в контейнер с дном, выполненным в виде ферромагнитной пластины и имеющим открытое для наблюдения окно (патент РФ №2222776 МПК 01В 7/06, опубл. 27.0103 г.).
Недостатком прототипа является ограниченный диапазон измеряемых величин, а также невысокая точность измерения.
Задачей изобретения является устранение недостатков прототипа и возможность измерения линейной (вдоль прямой линии), плоской (в плоскости) и объемной (в пространстве) деформации объектов из немагнитных материалов.
Поставленная задача решается с помощью признаков, указанных в п.1 формулы изобретения, таких как способ измерения деформаций объектов из немагнитных материалов, характеризующийся тем, что на поверхности или внутри объекта размещают постоянные дипольные источники поля, например на основе сплава неодим-железо-бор, при этом для вычисления параметров однополярной деформации используют как минимум два магнита, не лежащие в одной точке, для параметров плоской деформации - минимум три магнита, не лежащие на одной прямой, для параметров объемной деформации - минимум четыре магнита, не лежащие в одной плоскости, затем возле поверхности исследуемого объекта напротив каждого источника устанавливают систему датчиков, позволяющих измерить по 1, 2, 3 компоненты вектора индукции магнитного поля в нескольких точках, сосредоточенных в расположенных в малой по сравнению с расстоянием до источников поля области пространства, или в качестве системы датчиков используют датчик с системой 3D-позиционирования, сигналы с датчиков усиливают и преобразуют в цифровой вид, численные данные измерений: координаты точек измерения и значения компонент векторов индукции магнитного поля в них в лабораторной системе координат обрабатывают компьютерной программой, по полученным данным решают обратную задачу для системы слабо взаимодействующих магнитов и определяют их местоположение в лабораторной системе координат и векторы магнитных моментов в лабораторной системе координат до и после деформирования объекта, и, сравнивая эти решения, вычисляют параметры деформации.
Согласно п.2. формулы в качестве источников берут магниты, примерно равные по модулю.
Согласно п.3 формулы для закрепления на поверхности исследуемого объекта предпочтительно используют постоянные магниты цилиндрической или кубической формы, а при внедрении в тело объекта предпочтительно используют постоянные магниты шарообразной формы.
Согласно п.4 формулы датчики магнитного поля должны измерять по 1, 2, 3 компоненты вектора индукции магнитного поля в каждой точке области измерения, обладать большим динамическим диапазоном, высокой чувствительностью, высоким разрешением, малыми по сравнению с размером области измерения размерами чувствительной области и высокой линейностью.
Поставленная задача решается с помощью признаков, указанных в п.5 формулы изобретения, а именно установка для измерения деформаций объектов из немагнитных материалов согласно вышеописанному способу содержит постоянные дипольные источники магнитного поля, выполненные, например, в виде магнитов из сплава неодим-железо-бор цилиндрической, кубической и шарообразной формы, размещенные на поверхности или внедренные внутрь исследуемого объекта, примерно напротив которых установлены датчики, сигналы с которых поступают на вход усилителя, выход которого связан с входом аналого-цифрового преобразователя, выход которого связан с входом вычислительного модуля, например персонального компьютера, с помощью компьютерной программы усиленный сигнал в АЦП преобразуется в цифровой вид, по полученным данным измерения магнитного поля в областях измерения решается обратная задача для системы слабо взаимодействующих диполей, определяются координаты местоположения диполей и значения их векторов магнитных моментов в системе координат, имея информацию о местоположении диполей до и после деформации объекта, вычисляют параметры деформации исследуемого объекта.
Согласно п.6 формулы для измерения линейной деформации устанавливают на объект минимум два магнита, не лежащие в одной точке, для измерения плоской деформации устанавливают на или в объект минимум три магнита, лежащие в одной плоскости и не лежащие на одной прямой, для измерения объемной деформации устанавливают на или в объект минимум четыре магнита, не лежащие в одной плоскости.
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - возможность измерения линейной (вдоль прямой линии), плоской (в плоскости) и объемной (в пространстве) деформации объектов из немагнитных материалов.
Изобретение иллюстрируется следующей схемой установки (см. чертеж) и примерами реализации способа.
Установка для измерения деформаций объектов из немагнитных материалов содержит постоянные дипольные источники магнитного поля 1, выполненные, например, в виде магнитов из сплава ниодим-железо-бор цилиндрической, кубической и шарообразной формы, размещенные или внедренные в исследуемый объект 2, примерно напротив которых установлены датчики 3 (S1, S2, S3, S4), сигналы с которых поступают на вход усилителя 4, выход которого связан с входом аналого-цифрового преобразователя 5, выход которого связан с входом вычислительного модуля 6 (ОЗД), например, персонального компьютера, с помощью компьютерной программы 7 (авт.свид. РФ №2011616795 «Программа для решений обратных задач для одного и нескольких слабо взаимодействующих точечных магнитных диполей», авторы Машкин С.В., Марценюк М.А.) усиленный сигнал в АЦП преобразуется в цифровой вид, по полученным данным измерения магнитного поля в областях измерения решается обратная задача для системы слабо взаимодействующих диполей и определяются координаты местоположения диполей и значения их векторов магнитных моментов в системе координат, имея информацию о местоположении диполей до и после деформации объекта, вычисляют параметры деформации исследуемого объекта.
Для измерения линейной деформации устанавливают на объект два магнита, не лежащие в одной точке, для измерения плоской деформации устанавливают на или в объект три магнита, лежащие в одной плоскости и не лежащие на одной прямой, а для измерения объемной деформации устанавливают на или в объект четыре магнита, не лежащие в одной плоскости.
Общие условия процесса измерений
В основе способа измерения деформации лежит метод решения обратной задачи для системы слабо взаимодействующих точечных магнитных диполей, которая, в свою очередь, использует метод решения обратной задачи для одного точечного магнитного диполя.
Имеется исследуемый объект obj из немагнитного материала (см. чертеж), на поверхности или внутри которого располагаются магнитные диполи (в качестве которых можно использовать постоянные магниты, например, на основе материала NdFeB) с магнитными моментами mi. Для вычисления параметров линейной деформации необходимо минимум 2 диполя, не лежащих в одной точке. Для вычисления параметров плоской деформации необходимо минимум 3 диполя, лежащих в одной плоскости и не лежащих на одной прямой. Для вычисления параметров объемной деформации необходимы минимум 4 диполя, не лежащих в одной плоскости (на чертеже диполи m1, m2, m3 лежат в одной плоскости, а диполь m4 лежит вне этой плоскости).
Возле поверхности исследуемого объекта примерно в одной плоскости располагаются наборы датчиков магнитного поля Si - по одному примерно напротив каждого диполя. Каждый набор датчиков представляет собой систему датчиков, позволяющих измерять по три (по две, по одной) компоненты вектора индукции магнитного поля, и расположенных в некоторой малой области пространства. Требуемые количество и взаимное расположение датчиков могут варьироваться - главное требование - возможность решения обратной задачи для точечного магнитного диполя (см. далее). Сигналы с датчиков поступают на вход усилителя amp, затем усиленный сигнал поступает на вход аналого-цифрового преобразователя АЦП и преобразуется им в цифровой вид.
Численные данные измерения поля (координаты точек измерения rsa={xsa,ysa,zsa} и значения компонент вектора индукции магнитного поля Bsa=B(rsa)={Bsax,Bsay,Bsaz} - в системе координат OXYZ) поступают в вычислительный модуль ПК (построенный, например, на базе персонального компьютера). По полученным данным измерения поля в областях измерения решается обратная задача для системы слабо взаимодействующих диполей (соответствующая программа обозначена ОЗД-N), и определяются координаты местоположения диполей и значения их векторов магнитных моментов (по сути - ориентация диполей в пространстве) в системе координат OXYZ. Метод решения ОЗД-N и соответствующая программа основаны на методе решения обратной задачи для одного точечного магнитного диполя (ОЗД-N).
Посредством описанной системы положения Хi диполей mi в системе координат OXYZ измеряются до деформации объекта obj. После прикладывания к объекту obj внешнего воздействия F возникает деформация - диполи смещаются. Их координаты 
Имея информацию о местоположении (и ориентации) диполей до и после деформирования объекта, вычисляют параметры деформации G. Их, например, удобно представлять в виде матрицы аффинного преобразования (см. далее), которая описывает деформацию среды в локальной области - месте расположения диполей mi. Программа, решающая задачу определения параметров деформации, обозначена ДФРМ.
Используя большее количество магнитных диполей можно измерить параметры деформации во всех интересующих участках исследуемого объекта. Для этого удобно распределить необходимое количество диполей в узлах почти прямоугольной сетки у(или на) поверхности объекта и для определения параметров деформации использовать тройки (для плоской задачи) или четверки (для объемной задачи) близлежащих диполей.
В качестве источников берут магниты, примерно равные по модулю. Для закрепления на поверхности исследуемого объекта предпочтительно используют постоянные магниты цилиндрической или кубической формы, а при внедрении в тело объекта предпочтительно используют постоянные магниты шарообразной формы. Датчики магнитного поля должны измерять по 1, 2, 3 компоненты вектора индукции магнитного поля в каждой точке области измерения, обладать большим динамическим диапазоном, высокой чувствительностью, высоким разрешением, малыми по сравнению с размером области измерения размерами чувствительной области и высокой линейностью.
Для реализации предложенного способа измерения деформации была использована установка, обладающая следующими основными характеристиками (табл.1 и 2).
Для измерения вектора индукции магнитного поля использовался интегральный датчик Холла 2SA-10 фирмы SENTRON. Чтобы измерять 3 компоненты поля индукции использовалось 2 датчика, расположенных в перпендикулярных плоскостях. Измерение компонент вектора индукции поля двумя датчикам в одной точке достигалось соответствующим сдвигом второго датчика так, чтобы его чувствительная область располагалась в той же точке пространства, что и первая область.
Для того чтобы измерять поле в дискретном наборе точек посредством описанной выше системы из двух датчиков использовалась 3D-система позиционирования, построенная на трехшаговых двигателях. Для того чтобы исключить их влияние (они сделаны из магнитных материалов) на результаты измерения, датчики магнитного поля были удалены от них посредством достаточно длинного держателя (около 120-150 мм) из немагнитного материала (табл.3).

Посредством описанной системы были достигнуты следующие основные результаты. При использовании в качестве источника постоянного магнита с модулем магнитного момента 0.05 А/м2, конфигурации области измерения куб 3x3x3 точки измерения с шагом 0.95 мм по каждой из осей погрешность определения местоположения магнита составила от 1 до 3 мм (растет при удалении от магнита) на расстояниях до 40 мм.
При решении ОЗД-N для случая двух слабо взаимодействующих диполей с магнитными моментами 0.012 А/м2 (цилиндры: диаметр 3 мм, высота 1.5 мм, материал NdFeB), конфигурации области измерения куб 3×3×3 точки измерения с шагом 1.9 мм по каждой из осей расстояние между источниками около 30 мм, расстояние от плоскости источников до плоскости измерения 13 мм, погрешность определения местоположения диполей составила около 1 мм.
Преимущества способа:
- способ позволяет определить не только величину пространственного сдвига контролируемых точек объекта, но и пространственный поворот среды в этих точках;
- способ дистанционный: система датчиков располагается не на исследуемом объекте, а возле него;
- способ интроскопический: исследуемый объект может быть скрыт от системы датчиков слоем из немагнитного материала;
- способ достаточно быстродействующий: быстродействие измерений ограничено, в основном, быстродействием используемых датчиков магнитного поля (на сегодняшний день - порядка нескольких тысяч измерений в секунду).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРОМ ТИПА "ПРОСТРАНСТВЕННАЯ МЫШЬ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2480813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ ИЗГОТОВЛЕНИЯ, СБОРКИ И УСТАНОВКИ МАГНИТНЫХ СИСТЕМ | 2009 |
|
RU2431859C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Способ бесконтактного выявления наличия, месторасположения и степени опасности концентраторов механических напряжений в металле ферромагнитных сооружений | 2019 |
|
RU2724582C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| Способ определения магнитного момента дипольного источника поля и координат этого источника | 1985 |
|
SU1322208A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения деформаций немагнитных материалов. Способ измерения деформаций из немагнитных материалов характеризуется тем, что на поверхности или внутри объекта размещают постоянные дипольные источники магнитного поля, например на основе магнитов из сплава неодим-железо-бор, при этом для вычисления параметров линейной (вдоль прямой линии) деформации используют как минимум два магнита не лежащие в одной точке, для вычисления параметров плоской деформации - минимум три магнита, не лежащие на одной прямой, для вычисления параметров объемной деформации - минимум четыре магнита, не лежащие в одной плоскости. Возле поверхности исследуемого объекта напротив каждого источника устанавливают систему датчиков, позволяющих измерить по 1, 2, 3 компоненты вектора индукции магнитного поля в нескольких точках, сосредоточенных в малой по сравнению с расстоянием до источников поля области пространства, или в качестве системы датчиков используют одно-, двух- или трехосевой датчик с системой 3D-позиционирования, сигналы с датчиков усиливают и преобразуют в цифровой вид, численные данные измерений: координаты точек измерения и значения компонент векторов индукции магнитного поля в них в лабораторной системе координат обрабатывают компьютерной программой, по полученным данным решают обратную задачу для системы слабо взаимодействующих магнитов и определяют их местоположение в лабораторной системе координат и векторы магнитных моментов в лабораторной системе координат до и после деформирования объекта, и, сравнивая эти решения, вычисляют параметры деформации. Описана установка для предлагаемого способа. Технический результат - возможность измерения линейной (вдоль прямой линии), плоской (в плоскости) и объемной (в пространстве) деформации объектов из немагнитных материалов. 2 н. и 3 з.п. ф-лы, 1 ил., 3 табл.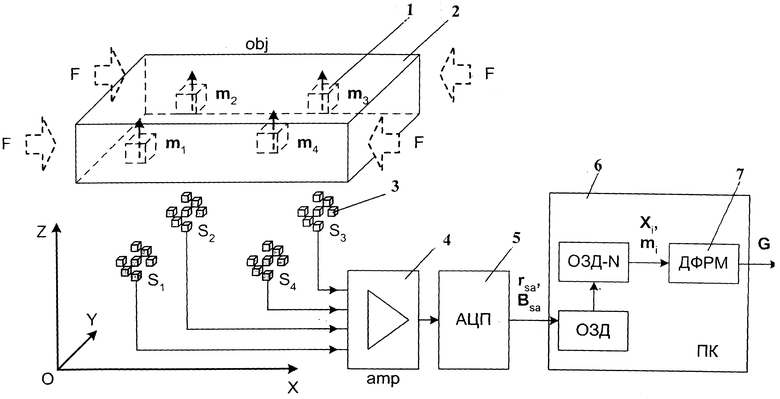
1. Способ измерения деформаций объектов из немагнитных материалов характеризующийся тем, что на поверхности или внутри объекта размещают постоянные дипольные источники магнитного поля, например постоянные магниты на основе сплава неодим-железо-бор, при этом для определения параметров линейной деформации (деформации вдоль прямой линии) используют, как минимум, два магнита, не лежащие в одной точке, для определения параметров плоской деформации - минимум три магнита, не лежащие на одной прямой, для определения параметров объемной деформации - минимум четыре магнита, не лежащие в одной плоскости, затем возле поверхности исследуемого объекта примерно напротив каждого источника поля устанавливают систему датчиков, позволяющих измерить по 1, 2 или 3 компоненты вектора индукции магнитного поля в нескольких точках, сосредоточенных в малой (по сравнению с расстоянием до источников поля) области пространства, или в качестве системы датчиков используют один одно-, двух- или трехосевой датчик с системой 3D-позиционирования, позволяющей поместить этот датчик в требуемые точки в пределах областей измерения и измерить по 1, 2 или 3 компоненты вектора индукции магнитного поля в них, сигналы с датчиков усиливают и преобразуют в цифровой вид, по данным о координатах точек измерения и значениям компонент вектора магнитной индукции, измеренных до деформации объекта, решают обратную задачу и определяют координаты положения диполей и их ориентацию до деформации объекта и таким же образом посредством решения обратной задачи на основе данных, полученных после деформации объекта, определяют координаты положения диполей после деформации объекта, на основе полученной таким образом информации о местоположении диполей и их ориентации до и после деформации определяют параметры деформации исследуемого объекта.
2. Способ по п.1, отличающийся тем, что в качестве источников берут магниты, модули векторов магнитных моментов которых примерно одинаковы.
3. Способ по пп.1 и 2, отличающийся тем, что для закрепления на поверхности исследуемого объекта предпочтительно используют постоянные магниты цилиндрической или кубической формы, а при внедрении в тело объекта предпочтительно используют постоянные магниты шарообразной формы.
4. Способ по п.1, отличающийся тем, что датчики магнитного поля должны измерять по 1, 2 или 3 компоненты вектора индукции магнитного поля в каждой точке области измерения, обладать большим динамическим диапазоном, высокой чувствительностью, высоким разрешением, малыми по сравнению с размером области измерения размерами чувствительной области и высокой линейностью.
5. Установка для измерения деформаций объектов из немагнитных материалов, отличающаяся тем, что она содержит постоянные дипольные источники магнитного поля, выполненные, например, в виде магнитов из сплава неодим-железо-бор цилиндрической, кубической и шарообразной формы, размещенные на поверхности исследуемого объекта или внедренные в него, при этом при определении параметров линейной деформации (деформации вдоль прямой линии) установка содержит как минимум два магнита, не лежащие в одной точке, при определении параметров плоской деформации - минимум три магнита, не лежащие на одной прямой, при определении параметров объемной деформации - минимум четыре магнита, не лежащие в одной плоскости, примерно напротив каждого из источников располагается группа датчиков, измеряющих по 1, 2 или 3 компоненты вектора индукции магнитного поля в нескольких точках, сосредоточенных в областях пространства, малых, по сравнению с расстояниями до источников, или в качестве системы датчиков используется один одно-, двух- или трехосевой датчик, снабженный системой 3D-позиционирования, позволяющей поместить этот датчик в требуемые точки в пределах областей измерения и измерить 1, 2 или 3 компоненты вектора индукции магнитного поля в них, сигналы с датчиков поступают на вход усилителя, выход которого связан с входом аналого-цифрового преобразователя, выход которого связан с входом вычислительного модуля, например персонального компьютера, с помощью компьютерной программы усиленный сигнал в АЦП преобразуется в цифровой вид, по данным о координатах точек измерения и значениям компонент вектора магнитной индукции, измеренных до деформации объекта, решают обратную задачу и определяют координаты положения диполей и их ориентацию до деформации объекта и таким же образом посредством решения обратной задачи на основе данных, полученных после деформации объекта, определяют координаты положения диполей после деформации объекта, на основе полученной таким образом информации о местоположении диполей и их ориентации до и после деформации определяют параметры деформации исследуемого объекта.
| Устройство для определения напряженного состояния бетонных строительных конструкций и изделий | 1981 |
|
SU1021934A1 |
| Устройство для измерения внутренних напряжений и деформаций в изделиях из немагнитных металлов | 1961 |
|
SU145045A1 |
| JP 6307803 A, 04.11.1994 | |||
| Способ увеличения съема тяжелого литья с 1 м2 площади | 1955 |
|
SU110514A1 |
| ПРОТИВОПАРАЗИТАРНЫЕ КОМПОЗИЦИИ ДЛЯ ПРИМЕНЕНИЯ ПУТЕМ ОБЛИВАНИЯ | 2018 |
|
RU2802299C2 |
| Машкин С.В., Марцинюк М.А., Метод измерения механических деформаций посредством системы магнитного компьютерного видения, Научно-технические ведомости СПбГПУ, физико-математические науки, N 4(88), 2009 | |||

