Изобретение относится к измерительной технике и может быть использовано для определения координат и магнитного момента дипольного источника поля, например, о .геофизике для проаедекмя магниторазведочных работ, в судостроительной промышленностм для обеспечения навигационного оборудования, в медицине для диагностики и т.д.
Цель изобретения - повышение точно- сти определения коорд11нат и магнитного момента дипольного источника поля и угфо- щение конструкции блока первичных преобразователей.
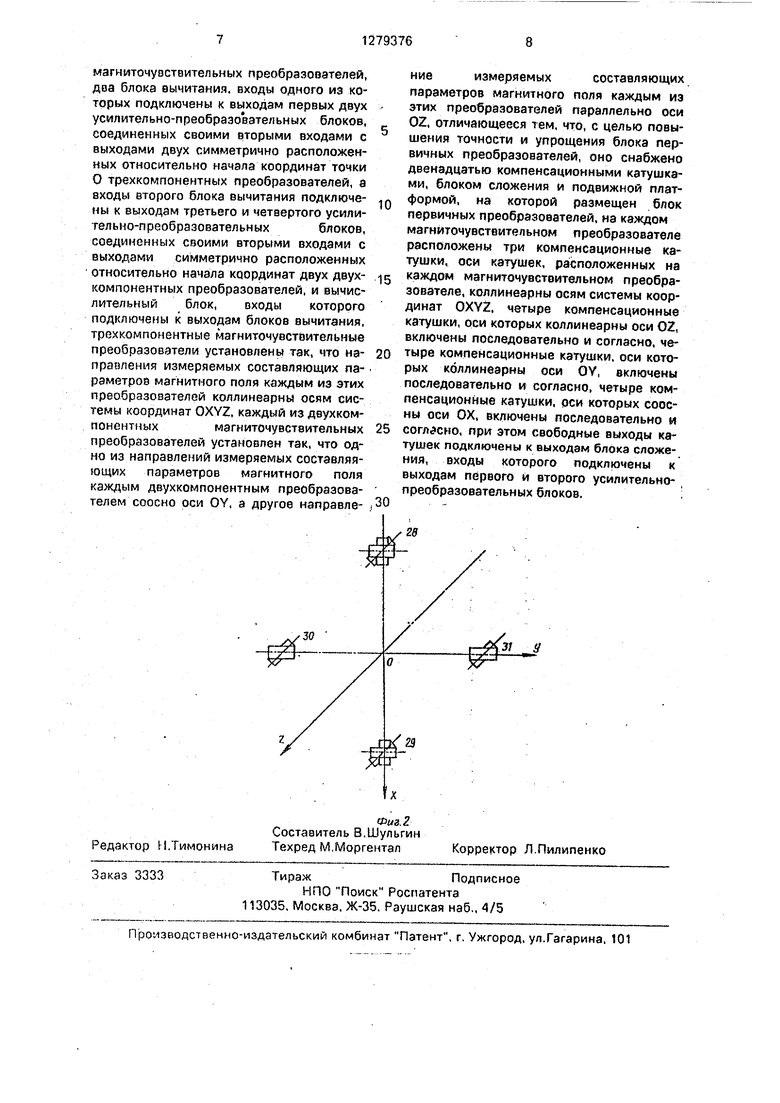
На фиг. 1 ччзображенз структурная схе- маустройств; на фиг. 2-пространственное расположение магниточувстаите/ ьных пре- образоеатолей.
Устройство содержит (см. фиг. 1) блок первичных преобразователей, состоящий из жесткого немагнитного основанил 1, трехкомпонентных магн,иточувствитель 1ых преобразователей 2 и 3 и двухкомпонент- ных магниточувствительных преобразова- телей 4 и 5, усилительно-преоб- разовательные блоки 6-9, генератор переменной ЭДС 10, блоки вычитания 11 и 12, вычислительный блок 13, блок сложения 14, двенадцать идентичных компенсационных катушек 15-26 м подвижную платформу 27. Выход генератора 10 подключен к первым сходам блоков 6-9 и преобразояатйлей 2-5. Входы блоков 11 и 14 подключены к выходам блоков 6 и 7, а оходы блока 12 подключены к выходам блоков 8 и 9. Выход преобразователя 2 подключен к второму входу блока 6, выход преобразователя 3 подключен к второму входу блока 7, выход преобразователя 4 подключен к второму входу блока 8, выход преобразователя 5 подключен к второму входу блока 9. Выходы блоков 11 и 12 подключены к входу вычислительного блока 13. Катушкк 15, 18, 21, 24 включены последовательно и согласно: а их выходные концы подключены к первому и второму выходам блока 14. Катушки 16, 19, 22 и 25 включены поспедоаательно и согласно, а их выходные концы подключены к третьему и четвертому выхо,цам блока 14. Катушки 17, 20, 23 и 26 включены последо- вательно и согласно, а их выходные ко.миы подключены к пятому и шестому выходам блока 14. Катушки 15, 16, Г/ располо, на преобразователе 2, катушки 18. 19, 20 расположены на преобразоезтеле 3, катуш- ки 21, 22, 23 расположены на преобразователе 4, катушки 24, 25. 26 расположены на преобразователе 5. Ма подвижной платформе 27 расположен первичных преойрз- зователей. При этом (см, фиг. 2)
трехкомпонентные магниточувствительные преобразователи 28 и 29 расположены на оси ОХ прямоугольной системы координат OXYZ, а двухкомпонентные магниточувствительные преобразователи 30 и 31 расположены из оси ОУ систер.ы координат. 1реобразователи 30 м 31 расположены сим- мйтричио относительно начала координат точки G системы OXYZ, причем установлены так, что одно из направлений измеряемых состайляющ11к пара. /етров магнитного поля каждым из этих преобрйзователей соосно оси ОУ, а другое направление измеряемых составляющих параметров магнитного поля каждым из указанны); преобразователей параллельно оси OZ. Преобразователи 28 и 29 установлены так, что направления измеряемых составляющ.их параметров магнитного гтоля каждым из этих преобразователей кол- линеарны соответствующим осям ОХ, ОУ, 0-Z системы координат OZy.
Устройство работает с/шдующим образом.
На первые входы преобрэзователей2-5 (см. фиг. 1) подается с генератора 10 переменная ЭДС, возбуждающая эти преобразо- патели. В результате этого на выходе каждого из преобразователей появляются ЭДС второй гармоники, каждая из которых (пропорциональна одной из трех составляющих магнитной индукции, созданной магнитным MOMetrroM диполя и однородным магнитным полем, например геомагнитным. Выходны-О сигналы с преобразователей 2-5 усиливаются и детектируются в соответствующих блоках 6-9, а затем подаются на входы блоков вычитаний 11 и 12. Выходные сигналы с блоков 6 и 7 подключены к входам 5/юка сложения 14. В олоке 14 осуидествля- ется сложение сигналов, пропорциональных составляющим «екторов магнитной индукции, измеренные преобразователями
2и 3. Выходные сигналы с блока 14, пропор- |иональны8 составляющим внешнего однородного магнитного ПОЛЛ и составляющим вектора магнитной индукции, созданной диполем в точке симметрии преобразователей
3и 3, 4 и 5, поступают а компенсационные катушки 15-26, осуществляя автокомпенса- цию однородного магнитного поля, действующего на нагнитомувстеительные преобразователи 2-5. В блоке 11 осуществляется вычитание сигналов, пропорциональных состсЗвляюц им векторов магнитной индукц1 и, измеряемых преобразоеате- лкми 2 и 3, а а блоке 12 осуществляется вычитание сигнвлоо, пропорциональных составляющим векторов магнитной индукции, измеряемых преобразователями 4 и 5. Сиг- гзэлы с блоков 11 и 12, пропорциональные
разностям векторов магнитной индукции, поступают на вычислительный блок 13, В блоке 13 по сигналам, пропорциональным разностям составляющих векторов магнитной индукции, осуществляется определение пространственных производных, характеризующих тензор грздие{1та магнитной индукции в точке пространства, относительно которой расположены преобразователи 28 и 29, 30 и 31 (см. фиг, 2). При перемещении подвижной платформы 27 определяют пространстаенные производные, характеризующие тензоры второго ранга. как минимум в двух точках пространства. По каждому тензору градиента вектора магнитной индукции в соответствующей точке пространства определяют единичный радиус-вектор дилольного источника с точностью до четырех направлений.
Если из полученных направлений радиус-векторов пересекутся в одной точке пространства только два направления, то эта точка и соответствует местоположению диполя. По радиус-вектору и пространственным производным вектора магнитной индукции, измеренным в одной из точек пространства, определяют магнитный момент дипольного источника поля. Единичные радиус-еекторы могут пересекаться в нескольких точках пространства. 8 таком случае по каждому радиус-вектору точки пересечения направлений единичных радиус- векторов и пространственным произзод- ным магнитной индукции, характеризующим тензоры второго ранга в каждой из двух точек прострайстеа. определяют возможные векторы магнитного момента дипо- ля. При пересечении в одной точке пространства истинных направлений единичных радиус-векторов и пересечении е других точках пространства ложных направлений единичных радиус-векторов местоположение Д15польного источника определяется по равенству векторов магнитных моментов в одной из точек пересечений, вычисленных по измеренным пространственным производным векторов магнитной индукции в двух точках проФормула изобретения
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И МАГНИТНОГО МОМЕНТА ДИПОЛЬНОГО ИСТОЧНИКА ПОЛЯ, содержащее блок первичных преобразователей, состоящий из жесткого немагнитного основания, двух трехкомпонентных магниточув- ствительныхпреобразоаателей,
расположенных на оси ОХ прямоугольной
странства. Если какие-то направления единичных радиус-векторов совпадают, то ди- польный источник находится на оси. совпадающей с одним из направлений этих 5 векторов. В таком случае по измеренным пространственным производным и местоположениям точек измерения данных пространственных производных векторов магнитной индукции определяют расстоя- 0 ние до диполя, а затем и вектор магнитного момента этого диполя. Определение координат и магнитного момента дипольного источника поля по измеряемым параметрам осуществляется в блоке 13.
5
В устройстве по сравнению с прототипом определение координат и магнитного момента дкпольного источника поля осуществляется только по разностям компонент
0 векторов магнитной индукции, измеренных в выбранных точках пространства, что повышает точность определяемых параметров, так как не требуется измерять для этих целей магнитное поле, созданное дипольным
5 источником. Кроме того, в устройстве осуществляется автокомпенсация однородного магнитного поля, действующего на магниточувствительные преобразователи, что повышает точность измерения разно0 стей составляющих векторов магнитной индукции по сравнению с прототипом более чем на порядок, а значит, устройство обеспечивает более оысокую точность определения координат и магнитного момента
5 дипольного источника поля, причем в устройстве по сравнению с прототипом блок первичных преобразователей содержит не три, а два трехкомпонентных магниточувст- вительных преобразователя, что значитель0 но упрощает конструкцию этого блока.
(56) Авторское свидетельство СССР N3 789949, кл. G 01 R 33/00.
IEEE Trans on Magnetic vol. MAG-11, 5 No2, March 1975. p. 701-707.
Семенов В.Г. Труды ВНИИМ. Сб. Методы и средства точных машинных измерений. -Л.; 1980, с. 3-19.
системы координат OXY2 данного основания, и двух двухкомпонентных магниточув- ствительныхпреобразователей,
расположенных на оси OY указанной системы координат данного основания, четыреусилительно-преобразовательныхблока, генератора переменной ЭДС, выход которого подключен к первым входам усилительно-преобразовательных блоков и
магниточуоствительных преобразователей, два блока вычитания, входы одного из которых подключены к выходам первых двух усилительно-преобразовательных блоков, соединенных своими вторыми входами с выходами двух симметрично расположенных относительно начала координат точки О трехкомпонентных преобразователей, а входы второго блока вычитания подключены к выходам третьего и четвертого усилительно-преобразовательныхблоков, соединенных своими вторыми входами с выходами симметрично расположенных относительно начала координат двух двух- компонентных преобразователей, и вычислительный блок, входы которого подключены tc выходам блоков вычитания, трехкомпонентные магниточувствительные преобразователи установлены так, что направления измеряемых составляющих параметров магнитного поля каждым из этих преобразователей коллинеарны осям системы координат OXYZ, каждый из двухком- понент шх магниточувствительных преобразователей установлен так, что одно из направлений измеряемых составляя- ющих параметров магнитного поля каждым двухкомпонентным преобразователем соосно оси OY, а другое направле0
5
0
5
ниеизмеряемыхсоставляющих
параметров магнитного поля каждым из этих преобразователей параллельно оси 02, отличающееся тем, что, с целью повышения точности и упрощения блока первичных преобразователей, оно снабжено двенадцатью компенсационными катушками, блоком сложения и подвижной платформой, на которой размещен блок первичных преобразователей, на каждом магнйточувствительном преобразователе расположены три компенсационные катушки, оси катушек, расположенных на каждом магниточувствительном преобразователе, коллинеарны осям системы координат OXY2, четыре компенсационные катушки, оси которых коллинеарны оси OZ, включены последовательно и согласно, четыре компенсационные катушки, оси которых коллинеарны оси OV, включены последовательно и согласно, четыре компенсационные катушки, оси которых соос- ны оси ОХ, включены последовательно и согласно, при этом свободные выходы катушек подключены к выходам блока сложения, входы которого подключены к выходам первого и второго усилительно- , преобразовательных блоков.i
3} Ц
Редактор Н.Тимонина
Фиг. 2
Составитель В.Шульгин Техред М.Моргентал
Заказ 3333
ТиражПодписное
НПО Поиск Роспатента 113035. Москва, Ж-35. Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина. 101
Корректор Л.Пилипенко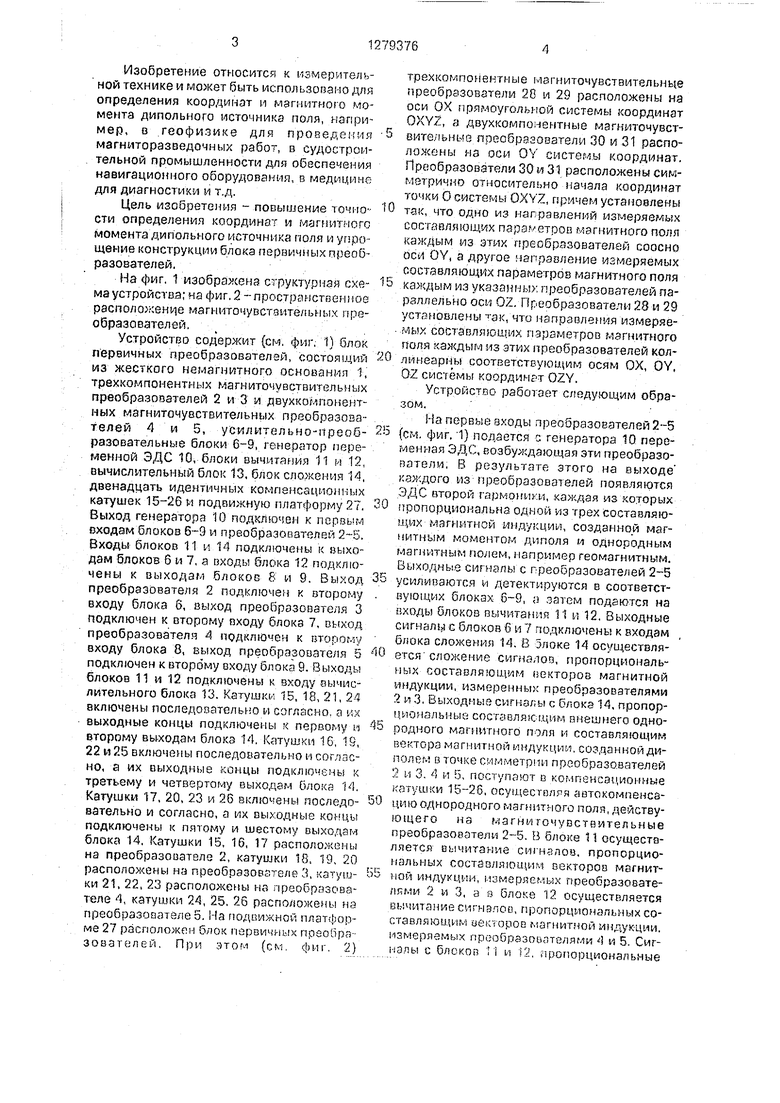
Изобретение относится к измерительной технике. Может быть использовано для определения координат и магнитного момента (ММ) дипольного иаочника пола например, в геофизике для проведения магниторазведочных работ, в судостроительной промышленности для обеспечения навигационного оборудования в медицине для диагностики и тл. Целью изобетения является повышение точности определения координат ММ дипольного источника поля и упрощение конструкции блока первичных преобразователей (БПП). Для достижения этой цепи в устройство введены двенадцать .компенсационных катушек 15-26. блок 14 сложения подвижная платформа 27, на которой размещен БПП. На чертеже также показаны: БПП, состоящий из жесткого магнитного основания 1, трех- и двух- компонентных преобразователей 2 и 3 и 4 и 5 со- ответстьенно, усилительно-лреобразовательные блоки 6-9, генератор 10 переменной ЭДС, блоки 11 и 12 вычиганиа вычислительный блок 13. В устройстве осуществляется автокомпенсация однородного магнитного пола что обеспе вает более высокую точность определе(«ля координат и магнитного момента дипопьного исто мика магнитного поля. 2 ил.