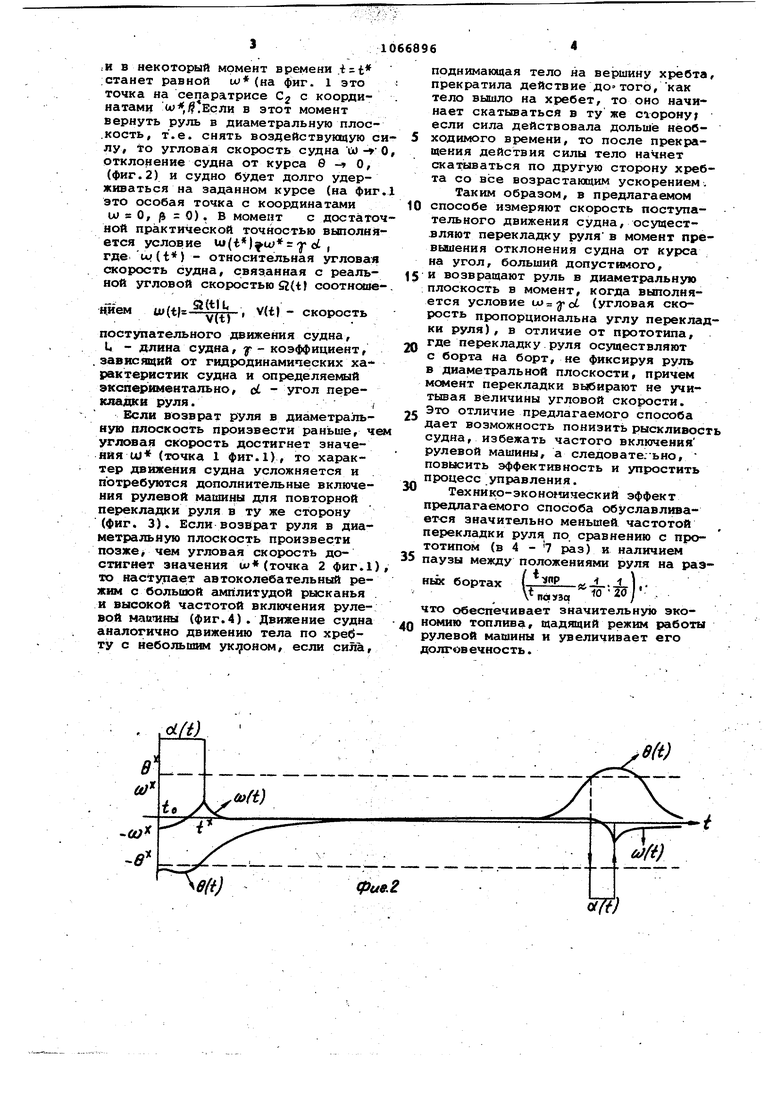
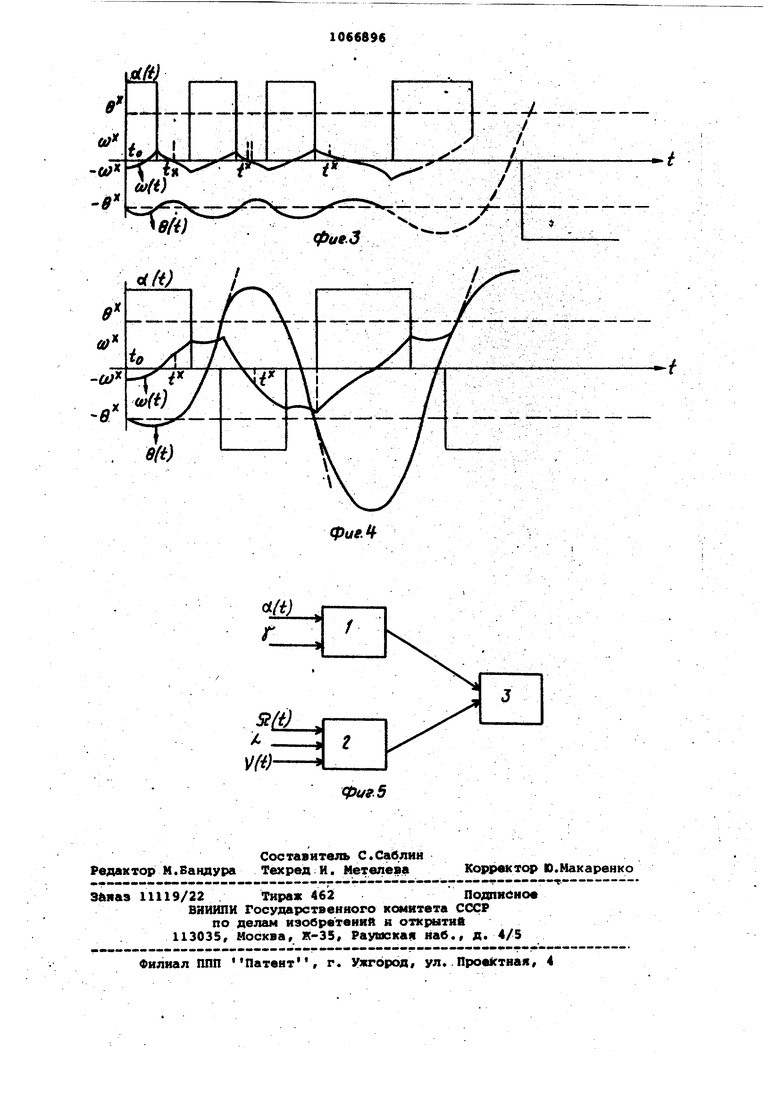
Иэовретение относится к судовождению. Известен способ управления OBW KeiJHeM судна, при котором измеряют угловую скорос- ь и угол отклонения судна от заданной траектории, после чего перекладывают руль Г13 При управлении судном описанные способом перекладку руля и одного борта на другой на некоторый угол производят не учитывая величины угловой скорости ,- пер1екладку осуществляют при совпадении знаков угловой скорости и поперечного смещ ния . Совпадение знаков происходит при различных значениях углоБой ско рости судно при этом имеет различный запас энергии и поэтому отклонения от курса в каждый момент перекладки руля различные. Это обуславливает повышенную рыскливость судна, необходимость частого включения рулевой машины, а следовательно, сложность и низкую эффектив ность управления. Целью изобретения является повышение эффективности и упрощение про цесса управления. Поставленная цель достигается тем, что согласно Способу управления движени&4 судна, при котором измеряют угловую скорость и угол отклонения судна от заданной траектории, после чего перекладывают руль, измеряют скорость поступательного движения судна, осуществля ют перекладку руля в момент отклонения судна от заданной траектории на угол, больший допустимого, и гоз ращают руль в диаметральную плоскость при величине относительно угловой скоростк tiJ .oL где - коэффициент, зависящий от гидродинамических характеристик судна; ot - угол перекладки руля. На фиг.1 представлена фазовая плоскость ш, р ( угол дрейфа .судна; w - относительная угловая CKo.iOCTb), характеризующая движение точки при отсутствии воздействующей силы, что отражает поведе ние суднз при положении руля в диаметральной плоскости; на фиг.2 диаграмма движения судна при управлении предлагаемым способом; на фиг. 3 - диаграмма характера движения судна при перекладке руля раньше, чем угловая скорость достигнет оптимального значения; на фиг.4 - д аграмма характера движения судна пр перекладке руля позже, чем угловая скорость достигнет оптимального значения; на фиг.5 - блок-схема, ре ализующая предлагаемый способ. Предлагаемый способ заключается в следующем. Определяется экспериментально коэффициент -jr , зависящий от гидродинамичесгсих характеристик судна. Определение у проводят путем задания различных численных значений и проведения 3-4 повторных экспериментов V Установка -у меньшего, чем необходи14О для данного типа судна, ведет к режиму движения судна , представленного на фиг.3 .Установка больше необходимого ведет к режиму движения судна, представленного на фиг. 4. Для разных типсш судов f изменяе ся от 0,15 до 0,5. Измеряют угол отклонения судна от курса 0(t) и в момент отклонения судна на угол, больший допустимого ё, произйодят перекладку руля на угол Ы , величина ко-щрого -умножается на постоянный Для данного типа судна коэффициент f 9 блоке 1 (фиг.5). Одновреме(1но измеряют угловую скорость Sl(i) и лянеКиую скорость V{t) поступательного квиженкя. Измерения угла отклонения, угла перекладки руля, угловой и линейной скоростей осуществляют со6тветствующ1 И датчика . ми (не показаны). В блок 2 поступает информация об угловой и поступательной скоростях судна, о его длине /L. и производится вычисление текущей относительной угловой скорости iu(t}s- m Затем производятся сравнение сигналов с выходе блоков 1 и 2 в блоке 3 (нуль-индикатор). В момент равенства этих сигналов (нулевое положение стрелки стрелки нуль-индикатора) прои.зводят возврат руля в диаметральную плосжость. Характер лшижения судна при управг лении предлагаемьм способом определяется законом изменения координат точки на фаэоной плоскости U) , /i при отсутствии воздействующей силы ( фиг.1) ьи-угловая скоpocTb, /i -угол дрейфа, C cenapaTpHcsii, ш 0, /5, - особая трчка типа седла. Если в момент is to (на фиг.1 не показан) начинает воздействовать сила, то в некоторый момент. координаты точки станут равны,ми ц;, /i, т.е. точка будет находиться на сепаратрисе С2. Бели в FOMeHTisf убрать воздействующую силу, то точка по сепаратрисе С2 будет приближаться к особой точке, .т.е.ш- 0,р - о и теоретически бесконечно долго удерживаться в этом .районе фазооой плоскости. В соответствии с описанным законом, если в MOMSttTi igt когда угол отклонения судна от заданного курса больше допустимого б произвести перекладку РУЛЯ на угол ot(t) (фйг.2) , то угловая скорость будег изменяться. .
.И в некоторый момент времени . :станет равной ш (на фиг. 1 это точка на сепаратрисе С с координатами и;, в этот момент вернуть руль в диаметральную плос.кость, т.е. снять воздействугацую силу, to угловая скорость судна , отклонение судна от курса ,
(фиг.2) и судно будет долго удерживаться на заданном курсе (на Фиг.1 это особая точка с координатами
U О, 0). В момент с достаточной практической точностью выполняется условие ui(t)w -у ot , где tv(t) - относительная угловая скорость судна, связанная с реальной угловой скоростью fit(t соотнетае-.
tt(, V(t| - скорость
нием
УШ поступательного движения судна,
U - длина судна, у коэффициент, зависящий от гидродинамических хаpaKTepiHCTHK судна и определяемый экспериментальног d - угол перекладки руля. Если возврат РУЛЯ в диаметральную плоскость произвести раньше, ч угловая скорость достигнет значения ЧО (точка 1 фиг.1), то характер движения судна усложняется и потребуются дополнительные включения рулевой машины для повторной перекладки руля в ту же сторону
(фиг. 3). Если возврат руля в диаметральную плоскость произвести позже чем угловая скорость достигнет значения и (точка 2 фигЛ то насТу эает автоколебательный режим с больиюй амплитудой рысканья и высокой частотой включения рулевой маашны (фиг.4). Движение судна аналогично движению тела по хрейту с небольшим уко;1оном, если сила
поднимающая тело на вершину хребта, прекратила действие до того, как тело вышло на хребет, то оно начинает скатываться в ту же сторону; если сила действовала дольше необходимого времени, то после прекращения действия силы тело начнет скатываться по другую сторону хребта со все возрастающим ускорением.
Таким образом, в предлагаемом
0 способе измеряют скорость поступательного движения судна, осуществляют перекладку руля в момент превышения отклонения судна от курса на угол, больший допустимого,
5 и возвращают руль в диаметральную плоскость в момент, когда выполняется условие (угловая скорость пропорциональна углу перекладки руля), в отличие от прототипа, где перекладку руля осуществляют
0 с борта на борт, не фиксируя руль в диаметральной плоскости, причем момент перекладки выбирают не учитывая величины угловой скорости. Это отличие предлагаемого способа
5 дает возможность понизить рыскливость судна, избежать частого включения рулевой машины, а следовате: ьно, повысить эффективность и упростить процесс .управления.
0
Технико-эконо адческий эффект предлагаемого способа обуславливает ;я значительно меньшей частотой перекладки руля по. сравнению с прототипом (в 4 - раз) и наличием 5 паузы между положениями руля на разЧпр
/ пр - . 1 V.
ных бортах
felT
пауъа
что обеспечивает значительную экоп номию топливуг щадящий режим работы рулевой машины и увеличивает его долговечность.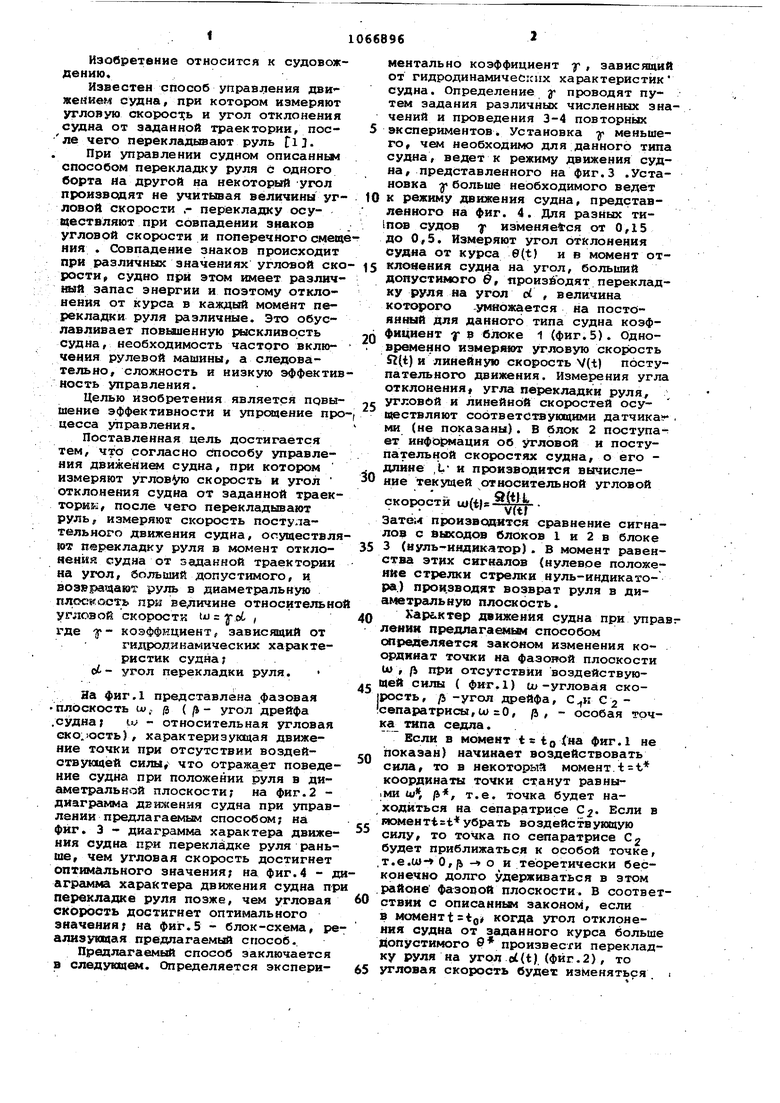
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| Способ управления курсом речного судна | 1978 |
|
SU758902A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ ТОРМОЖЕНИЯ КРУПНОТОННАЖНОГО СУДНА | 1996 |
|
RU2107004C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2004 |
|
RU2263606C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА, при котором измеряют угловую скорость и угол отклонения судна от заданной траектории, после чего перекладывают руль, отличающийся тем, что, с целью повьшения эффективности, измеряют скорость поступательного движения судна, осуществляют перекладку руля в момент отклонения судна от заданной траектории на угол, боль- . ший допустимого, и возвращают руль в диаметральную плоскость при велич: че относительной угловой скорости to -у i где f- коэффициент, зависящий от гидродинамических характеристик судна; cL - угол перекладки руля. Ф о 00 со Од . 1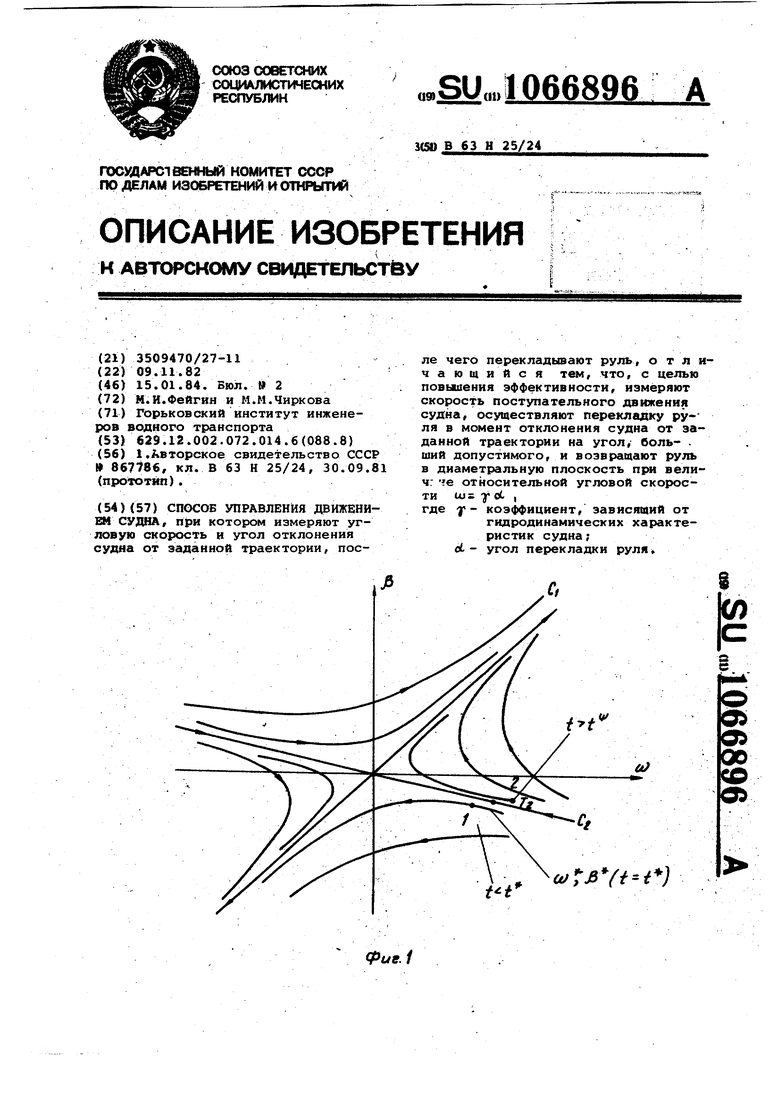
-д ,
фиеЛ -
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
