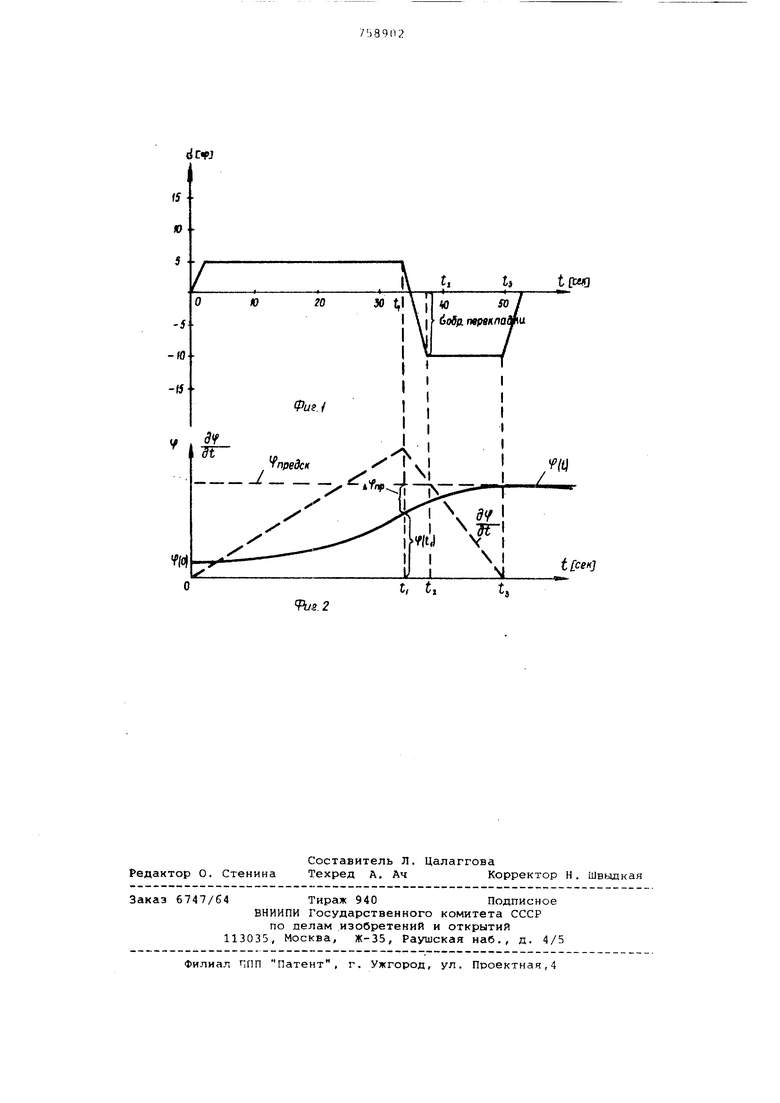
Изобретение относится к области управления движением подвижными об ектами, в частности, управления уг ловым движением речного судна. Существующие способы ручного уп равления угловым движением судна с использованием сигнала угла курса получили широкое распространение в настоящее время При управлении крупнотоннажными судами рулевой переклсщывает руль в нужном направлении и, не доходя до заданного направления движения судна, производит обратную перекла ку руля. Недостатком такого способа управления является трудность опреде ления момента обратной перекладки руля. В авторулевых типа АБР в режим ручного управления для повьяиення качества ручного управления момент начала сдерживания формируется по сумме двух сигналов 1 t К f тек о.с - коэффициент обратной свя о.с. зи , перестраиваемой в зависимости от скорости да судна ; тек текущий курс судна; (f - угол перекладки руля. Зависимость (1) образования будущего (предсказанного) углового положения судна справедлива только для фиксированной скорости хода и конкретной величины перехода судна по курсу. С целью устранения этого недостатка был предложен способ управления курсом морского судна, в котором принята следующая стратегия управления при переходе на новый курс: -перекладывают руль с максимальной скоростью в сторону заданного поворота судна; -Б момент, когда а;:гебраическая сумма сигналов текущего курса угловой скорости судна (с переменным весовым коэффициентом) и угла перекладки руля (также с переменным весовым коэффициентом) достигает величины требуемого (будущего) угла курса, перекладывают руль в обратную сторону с максимальной скоростью;-затем формируют сигнал для определения второго момента времени, когда нужно нз 1енить знак скорости перекладки руля, когда алгебраическая сумма сигналор, образующих предсказанное значение курса, начнет убывать и станет меньше заданного (будущего) значения курса 2. Рассмотренный способ ручного управления весьма эффективен при управлении морскими судами и оказывается совершенно неприемлемым при управлении поворотом ручного судна. Способ ручного управления, принятый нами в качестве прототипа,, невозможно использовать без коррекции приведенной выше стратегии управления при управлении речным судном. Это объясняется тем, что начало поворота речного судна обычно задают произвольным, но небольшим углом отклонения руля от нулевого положени аодерживание (выход) на новое направление движения судна осуществля ют также путем обратной перекладки руля на какое-то постоянное значени а нг. перекладкой руля с максимально скоростью. При таком управлении фор мирование моментов переключения рул вого привода должно быть доопределе но, что представляет значительные трудности. Иная стратегия управления речным судном объясняется существенным отличием динамических характеристик углового движения речного судна по сравнению с морским судном. Неустойчивость углового движения присуща всем плоскодонным судам. В случае же управления речным судном наличие этого явления усугубляется еще и тем,- что рулевое управление речного судна обычно оборудовано не следящим рулевым приводом, как это сделано на большинстве морских судо а интегрирующими приводами ,т .е . ...уго отклонения рукоятки рулевого интерв ла пропорционален скорости переклад ки руля, а не углу перекладки руля Для рабочих диапазонов изменения угловой скорости процесс набора угловой скорости речного судна мож но представить в динамике интегрируюа1им звеном первого порядка: .м) текущий угол поворота суд на ; угол перекладки руля; коэффициенты, зависящие скорости хода судна, глу бины под килем, осадки с на, угла дифферента; -- - производная по времени. Тогда процесс поворота речного суд на на заданный угол можно представ для подавляющего числа возможных р ямов эксплуатации в виде трех поседовательно включенных интег ра- ороп : , где К коэффициент, зависящий от скорости хода судна, осадки судна, глубины под килем; скорость перекладки руля (угол отклонения штурвала). Как известно, управление даже двумя последовательно включенными интеграторами представляет определенную трудность, тем более сложно управление направлением движения речного судна, т.к. необходимо управлять тремя последовательно включенными интеграторами (3). Судоводитель отклоняет рулевой штурвал и задает тем самым скорость перекладки руля. Угол отклонения руля пропорционален интегралу от угла отклонения рулевого штурвала по времени, а угловая скорость судна пропорциональна двойному интегрированию угла отклонения рулевого штурвала по времени, а угол поворота судна - тройному интегралу угла отклонения рулевого штурвала по времени. В то же время процесс перехода морского судна на новый курс при отклонении рулевого штурвала обычно может быть описан как произведение инерционного звена на одно интегрирующее, т.е. при разработке стратегии управления угловым движением речного судна необходимо учесть это существенное отличие. Целью изобретения является повышение точности и.безопасности управления. Поставленная цель достигается тем, что в способе управления курсом речного судна путем осуществления в первый момент времени перекладки руля на угол, определяемый скоростью судна и заданным yrj.oM поворота, осуществления во второй момент времени обратной переклад руля, а в третий момент времени сведения угла перекладки к нулю дополнительно определяют угловую скорость судна и соответствукадее ей прогнозируемое приращение угла поворота судна и осу1цествляют обратную перекладку руля в момент,когда сумма текущего угла поворота, и прогнозируемого приращения угла поворота судна равна заданному углу поворота, причем величину угла обратной перекладки руля определяют согласно зависимости ОБр.перекл/ где К - весовой коэффициент; Ш - угловая скорость судна; V- .ii;:i.;:iiri i (-..Kripcicii. судна, пчеле ) yrtj.T поворота ofjpuTHOi перекладки руля ./меиьшакт до нуля при достижении угловой скоростью нулевого значения. Предлагае№11й способ поясняется чертежом, на котором представлен в качестве примера процесс перехода речного судна на новое направление движения - переход с курса fo на ад. На фиг. 1 приведена зависимость угла перекладки руля сУ f(t) (уго перекладки руля задает судоводитель На фиг. 2 приведена зависимость изм нения угловой скорости судна во вре мени ( и углового поворота сулн во времени Ч в функции угла перекл ки руля. Рассмотрим процесс управления с использованием предложенного способ (на примере процесса перехода речно судна по курсу, приведенного на фиг. 1,2). В случае необходимости изменения направления судна с курса Д° курса tf 30(5 ЧпрвЭск перекладывают руль в требуемом направле нии (в нашем случае руль переложен rf +5°С) и остается переложенным до момента времени t , который явля ется вторым моментом времени переключения. В интервале времени 0-t угловая скорость судна растет пропорциональ но углу перекладки руля (который постоянен) и времени (на фиг. 2 угл вая скорость обозначена пунктирной линией). Для определения второго момента вр мени переключения угла перекладки рул (в нашем случае t, ), формируют сигнал, пропорциональный предсказанном значению будущего угла поворота суд на, если в момент времени t начать процесс одерживания судна: (. гдеЧ(,-Ь/1) - курс судна в момент времени t ; .ц, (, ..(JdSi)| (5) .cK ibSdt i dt I приращение курса в момент времени t Величину обратной перекладки руля определяют по совпадению сигнала угла перекладки руля с сигналом пропорциональным (5): перекл Ч1г 1 1 с момента времени t , когда выпо нено условие (6), руль остается в отклоненном положении, угловая окорость судна уменьшается пропорционально времени и в момент времени t, достигает нулевого значения. Возвращение руля Б нулевое положение производят в момент, когда уг;;эвая скорость --- О (в нашем случае это соответствует времени . В момент времени t / t, судно вышло на новое направление движения . Использование предложенного способа позволит сзкономить расход топлива на 2-3%, сократить время перехода на новое направление движения без перерегулирования, т.е. без дополнительной потери времени и скорости хода судна, сократить процесс обучения судоводителей и повысить безопасность плавания. Формула изобретения Способ управления курсом речного судна путем осуществления в первый момент времени перекладки руля на угол, определяемый скоростью судна и заданным углом поворота, осуществления во второй момент времени обратной перекладки руля, а в третий момент времени сведения угла i;epeкладки руля к нулю, отличающийся тем, что с целью повышения точности и безопасности управления, определяют угловую скорость судна и соответствующее ей прогнозируемое приращение угла поворота судна и осуществляют обратную перекладку руля в момент, когда сумма текущего угла поворота и прогнозируемого приращения угла поворота судна равна заданному углу поворота, причем величину угла обратной перекладки руля определяют согласно зависимости.перекл- де К - весовой коэффициент; CD - угловая скорость судна; V - линейная скорость судна, осле чего угол поворота обратной ерекладки руля уменьшают до нуля ри достижении угловой скоростью улевого значения. Источники информации, ринятые во внимание при экспертизе 1.Савченко B.C., Анненков Н.П. ортовая система управления БСУ-ЗП, ./Транспорт Г 1974, с. 64. 2.Шлейер Г.Э. Прогнозирование урса судна7 Судостроение № 12, 976, с. 27-29 (прототип).
IS ю
5
-5 -Ю -t5
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ | 2024 |
|
RU2828164C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
.т
t, t.
