Изобретение относится к управлению движущимся объектом, например судном, при следовании по заданной в плоскости траектории и касается автоматического управления рулем с использованием поперечных смещений двух точек судна.
Известны способы управления движущимися объектами, например судами, по величине поперечного смещения одной точки судна от заданной траектории (SU 509494. В 63 Н 25/00; SU 1062129 А, В 63 Н 25/00; SU 908656, B 63 H 25/00; SU 724389, В 63 Н 25/04).
Недостатками такого способа являются, во-первых, невозможность точного удержания судна на заданной траектории, а только обеспечение его движения по параллельной траектории, расположенной на том или ином по величине расстоянии от заданной траектории, в зависимости от величины удаления, так называемой (SU 509494, В 63 Н 25/00) точки управления от датчика поперечного смещения; чем дальше удалена точка управления от датчика поперечного смещения в направлении курса управляемого объекта, например судна, тем меньше отклонение реальной траектории движения от заданной траектории движения.
Во-вторых, точка управления, по поперечному смещению которой осуществляют управление движущимся объектом, как правило, находится за пределами контура управляемого объекта, что делает необходимым выполнение расчетов ее поперечного смещения от заданной траектории и, как следствие, качество управления ухудшается; смещение точки управления в пределы контура управляемого объекта, не исключив необходимость расчетов, приведет только к существенному снижению точности удержания управляемого объекта на заданной траектории, в частности, из-за потери устойчивости управления движением (Першиц Р.Я. Управляемость и управление судном. - Л.: Судостроение, 1983, 272 с.). В-третьих, в расчетах величины поперечного смещения точки управления с заданной траектории учитывают значение курса судна, точность определения которого ±2,0°, а при быстрой смене курса ±4,0°, в связи с этим в способах достижения качества управления возникает определенное противоречие: с одной стороны, чем дальше расположена точка управления от датчика поперечного смещения, тем ближе реальная траектория движения управляемого объекта, например судна, к заданной траектории, с другой стороны, чем дальше точка у правления в направлении курса судна от датчика поперечного смещения, тем меньше точность определения поперечного смещения точки управления и, как следствие, снижение качества управления.
Наиболее близким аналогом к заявляемому изобретению является следующий способ управления движущимся объектом (А.с. СССР №509494, М. Кл. - 2 В 63 Н 25/00 « Способ управления движущимся объектом», заявл. 04.03.74, опубл. 05.04.76, авторы Першиц Р.Я. и Тумашик А.П.). Способ управления движущимся объектом по поперечному смещению заключается в том, что поперечное смещение от заданной траектории и отворот судна от направления последней измеряют специальными датчиками и путем автоматизированного расчета определяют поперечное смещение заранее выбранной точки по длине объекта, которое сообщается рулевому. Перекладка руля производится рулевым, который учитывает только поперечное смещение выбранной точки.
Способ достаточно прост и сравнительно точен в удержании объекта на заданной траектории. Однако точность удержания судна на заданной траектории все-таки не столь высока, как того требуют современные условия мореплавания. Кроме того, этому способу присущи все выше перечисленные недостатки подобного способа управления движущимся объектом. Цель изобретения - повышение точности удержания объекта на заданной траектории и улучшение качества управления, выражаемого, например, в количестве переключений органа управления (руля) в единицу времени.
Это достигается тем, что в пределах контура судна, в его диаметральной плоскости (ДП) выбирают две точки, одна из которых расположена к носу судна (точка А на фиг.1-4), а другая к корме судна (точка В на фиг.1-4) относительно плоскости мидель-шпангоута. Расстояние между точками А и В выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением судна по заданной траектории.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные смещения точки А (YA) и точки В (YB) от заданной траектории. Причем поперечное смещение точки от заданной траектории считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (см. фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля судна, по закону:

где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной траектории. Это положительные величины, причем kA больше kB. Угол перекладки руля α считается положительным при его перемещении в сторону правого борта.
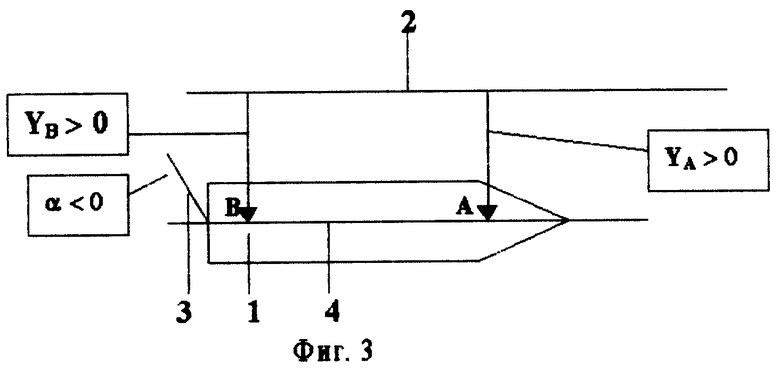
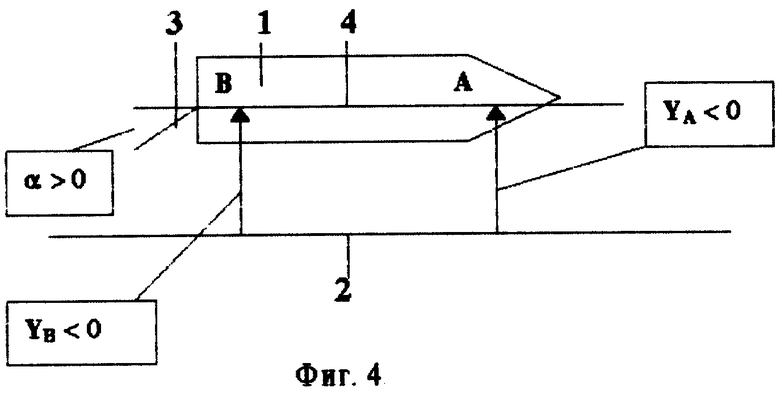
На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной траектории 2 и управление в каждом из них (угол перекладки руля 3). Например, на фиг.1, 2 ДП судна 4 пересекает заданную траекторию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки А (YA) и точки В (YB), причем YA больше 0, YB меньше 0 на фиг.1 и YA меньше 0, YB больше 0 на фиг.2. В первом случае (см. фиг.1.) согласно закону (1) угол отклонения руля будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет поворот влево, что приведет к уменьшению YA и YB и в конечном итоге к выходу судна на заданную траекторию; во втором случае (фиг.2) согласно закону (1) угол отклонения руля будет иметь положительное значение, т.е. руль будет переложен на правый борт и судно начнет поворот вправо, что приведет к уменьшению YA, YB и к выходу судна на заданную траекторию.
На фиг.3, 4 ДП судна 4 не пересекает заданную траекторию 2, а поперечные смещения точек А, В имеют одинаковые знаки, положительные на фиг.3 и отрицательные на фиг.4. Знак и соответствующее направление угла перекладки руля зависят от соотношения значений коэффициентов kA и kB (kA больше kB, если знаки поперечных смещений точек А и В одинаковы, фиг.3,4; kA и kB будут равны по величине, если знаки поперечных смещений точек А и В противоположны, фиг.1, 2). Соотношение значений коэффициентов kA kB может выбираться из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:

где l - расстояние между точками А и В.
В результате применения данного изобретения достигается возможность получения технического результата - повышение качества управления и точности удержания судна на заданной траектории, следовательно, предлагаемый способ управления движущимся объектом соответствует критерию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509679C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2010 |
|
RU2422326C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2011 |
|
RU2475410C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА, СТОЯЩЕГО НА ЯКОРЕ | 2012 |
|
RU2509031C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ БУКСИРУЕМОГО СУДНА | 2011 |
|
RU2470828C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |

Изобретение относится к водному транспорту и касается управления движущимся объектом, например судном, при исследовании по заданной плоскости траектории в случае автоматического управления рулем с использованием поперечных смещений двух точек судна. Способ управления движущимся объектом, например судном, по величине поперечного смещения судна от заданной траектории заключается в том, что выбирают точку управления, определяют величину поперечного смещения от заданной траектории до точки управления и учитывают его при перекладке руля. При этом используют дополнительную точку управления, обе точки управления располагают на диаметральной плоскости судна, причем одна из них является носовой, а другая кормовой. Перекладку руля производят в зависимости от комбинации поперечных смещений носовой и кормовой точек от заданной траектории, причем для вычисления смещения этих точек используют их координаты. При таком способе управления целесообразно координаты носовой и кормовой точек измерять с помощью спутниковой навигационной системы. При этом измерение координат носовой и кормовой точек могут осуществлять с дифференциальными поправками. Технический результат реализации изобретения заключается в повышении качества управления и точности удержания объекта на заданной траектории. 2 з.п. ф-лы, 4 ил.
| Способ управления движущимся объек-том | 1974 |
|
SU509494A1 |
| US 5983145 А, 09.11.1999 | |||
| US 3737635 А, 05.06.1973. | |||

