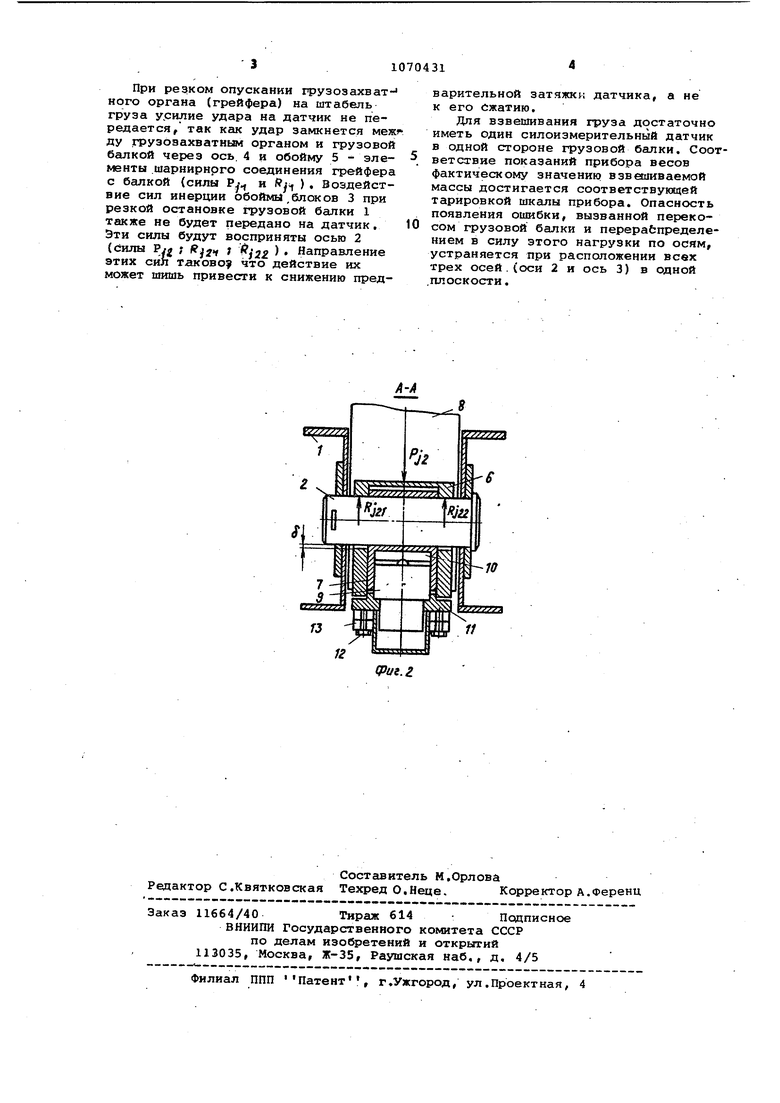
Изобретение относится к весоизмерительной технике и может быть использовано в крановых весах, для кранов, снабженных..грузовой балкой. Известны грузоприемные устройства, в которых тензометрическч датчик размещен мезеду двумя траверсами шарнирно соединенными череэ щеки с обоймой крюка и серьгой 1J, Недостатком указанных устройств является потеря полезной высоты крана, Дт}я кранов грузопряьемностью 32 тс эта потеря достигает значитель ной величины (1300-1400 мм). Наиболее близким к предлагаемому по технической сущности является устройство, содержащее грузовую валку, шарнирно соединенную с обоймами блоков грузового полиспаста и с .обоймой подвески грейфера, и силоизмерительный датчик C2J. .Поскольку силоизмерительный датчик выполнен на оси канатных блоков то он воспринимает все нагрузки, ко торые действуют на ось полиспаста, а на ось действуют не только усилия от веса груза, но и ударные нагрузки от сил инерции при работе крана с грейфером, когда грейфер забирает груз. Особенно большие нагрузки появляются в случае массивной обоймы блокоа или при применении трособлочной системы с использованием грузовой балки. Кроме того, силоизмерительный датчик, установленный на оси блоков, представляет собой деталь крана и ис-ользовать в этом случае стандартные датчики нельзя, а смена или обслуживание (проверка) датчика связана с разборкой всего грузоприемного механизма. Цель изобретения - повышение точности измерения за счет устранения действия ударных нагрузок от сил инерции на датчики, а также удобство обслуживания. Указанная цель достигается тем, что в грузоприемном устройстве, содержащем грузовую балку, шарнирно соединенную с обоймами блоков грузового полиспаста и с обоймой подвески грузозахватного механизма (грейфера и силоизмерительный датник, силоизме рительный датчик установлен с now ,мощью двух телескопически расположе ных друг в друге стаканов на оси обоймы блоков. в. месте шарнирного сое динения обоймы блоков грузового полиспаста с грузовой балкой, причем наружный стакан жестко закреплен на щеках обоймы с зазором, пои этом силоиэмерительйый датчик размецен во внутреннем стакане под осью обоймы блоков, а оси грузозахватного механизма л обоймы блоков расположены в одной плоскости. Внутренний стакан снабжен съемной крышк ой. На фиг. 1 изображено устройство, общий вид; на фиг, 2 - разрез А-А на фиг. 1. Грузоприемное устройство крановых весов содержит грузовую балку 1, на которой на одной прямой размещены оси. 2 обойм блоков 3 грузового п&лиспаста и ось 4 с обоймой 5 для грузозахватного органа. В месте шарнирного соединения одной из обойм блоков 3 грузового долиспаста с грузовой балкой 1 на оси 2 смонтированы два телескопически размещенные друг в друге стакана 6 и 7. Наружный стакан б жестко закреплен на щеках 8 .обоймы блоков 3 и установлен на оси 2 .с зазором сЛ, а во внутреннем стакане 7 под осью 2 размещен силоизмерительный датчик 9, который с одной стороны контактирует с центрирующей шайбой 10, а с другой стороны своими заплечиками опирается на крышку 11, соединенную с наружным стаканом б при помощи шпилек 12 и гаек 13. Устройство работает следующим образом. При подъеме груза усилие от его веса через обойму 5 грузозахватного механизма передается на ось 4 и далее в зависимости от соотношения плеч Й и €2 распределяется между осями 2. Усилие от оси- 2 через внутренний стакан 7 центрирующей шайбы 10 передается на датчик 9. При этом датчик $ оказывается зажатым между внутренним 7 и наружным 6 стакааамк через крышку il и воспринимает нагрузку, пропорциональную весу подвешенного груза. При нагружении датчика 9 наружный стакан 6 вместе с обоймой блоков 3 перемещается вверх относительно стакана 7 н.а величину деформации датчика 9, уменьшая при этом соответственно зазор между осью 2 и наружным стаканом б. Сигнал от датчика 9 поступает на вторичный прибор, где он преобразуется, а затем регистрируется. Зажатие датчика обеспечивается только при наличии зазора. При отвинчивании гаек 13 зазор rf исчезнет и датчик перестает работать как силоизмерительный элемент. Работоспособ-г ность крана при этом-сохраняется. Предлагаемая конструкция грузоприемного устройства позволяет легко менять датчик, не разбирая обойму грузового полиспаста грузовой балки, позволяет использовать серийною датчики ойдепромышленного назначения, причем, изменяв размеры и форму стакан0в, можно использовать датчики различных марок.
При резком опускании грузозахват- ного органа (грейфера) на штабельгруза урилие удара на датчик не передается, так как удар замкнется межп ДУ грузозахватным органом и грузовой балкой через ось. 4 и обойму 5 - элементы шарнирнрго соединения грейфера с балкой (силы Ру и Kj ) , Воздействие сил инерции обоймы ,блоков 3 при резкой остановке грузовой балки 1 также не будет передано на датчик. Эти силы будут восприняты осью 2 (силы Pjf Rjf4 J i22. Направление этих сил таково что действие их может шишь привести к снижению предварительной затяжки датчика, а не к его сжатию.
Для взвешивания груза достаточно иметь один силоизмерительный датчик в одной стороне грузовой балки. Соответствие показаний прибора весов фактическому значению взвешиваемой массы достигается соответствующей тарировкой шкалы прибора. Опасность появления ошибки, вызванной перекосом грузовой балки и перераЬпределением в силу этого нагрузки по осям, устраняется при расположении всех трех осей.(оси 2 и ось 3) в одной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСЫ ДЛЯ ЗАЛИВОЧНОГО КРАНА | 2006 |
|
RU2306533C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАГРУЗКИ НА ГРУЗОЗАХВАТНОМ ОРГАНЕ СТРЕЛОВОГО ПОДЪЕМНОГО КРАНА | 1998 |
|
RU2149820C1 |
| Весы для заливочного крана | 1983 |
|
SU1117457A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2049038C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Мостовой кран для подъема грузов | 1979 |
|
SU787344A1 |
| Грузовая подвеска крана | 1982 |
|
SU1030296A1 |
| КРАНОВЫЕ ТЕНЗОРЕЗИСТОРНЫЕ ВЕСЫ | 2013 |
|
RU2536763C1 |
| Двухчелюстный грейфер | 1974 |
|
SU527367A1 |
1. ГРУЗОПРИЕМНОЕ УСТРОЙСТВО КРАНОВЫХ ВЕСОВ, содержащее грузовую балку, шарнирно соединенную с обоймами блоков грузового полиспаста и с обоймой подвески грузозахватного механизйа (грейфера) и силоизмерительный датчик, отличающее с я тем, что, с целью повышения точности измерения за счет устранения действия ударных нагрузок от сил инерции на датчики, силоинмерительный датчик установлен с помощью двух телескопически расположенных друг в друге стаканов на оси обоймы блоков в месте шарнирного соединения обоймы блоков грузового полиспаста с грузовой балкой, причем наружнЬй стакан жёстко эакрет1лен на щеках обой.мы с зазором, при этом силоизмерительный датчик размещен во,вн5п:реннем стакане под осью обоймы блоков, а оси грузозахватного механизма и обоймы блоков расположены в одной С S плоскости. 2. Устройство по п. I, отли(Л чающееся тем, что, с целью удобства обслуживания, внутренний I стакан снабжен съемной крышкой. 4 DO
-А
(Риг
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электронные теизометрические весовйе устройства | |||
| Каталог- -справочник | |||
| ОНТИприбор | |||
| М., 1966 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3827514, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
