Изобретение относится к подъемно-транспортному машиностроению, а именно к конструкциям устройств, предназначенных расширить технологические возможности крюковых мостовых кранов, конкретно к грузозахватным устройствам для складирования грузов в стеллажи и штабеля, и может быть использовано во всех отраслях народного хозяйства, где используются крюковые мостовые краны
Штанга 26 в нерабочем состоянии фиксируется с помощью канатов 23 и 24 в выполненные в нижней части рамы 16 рога 27.
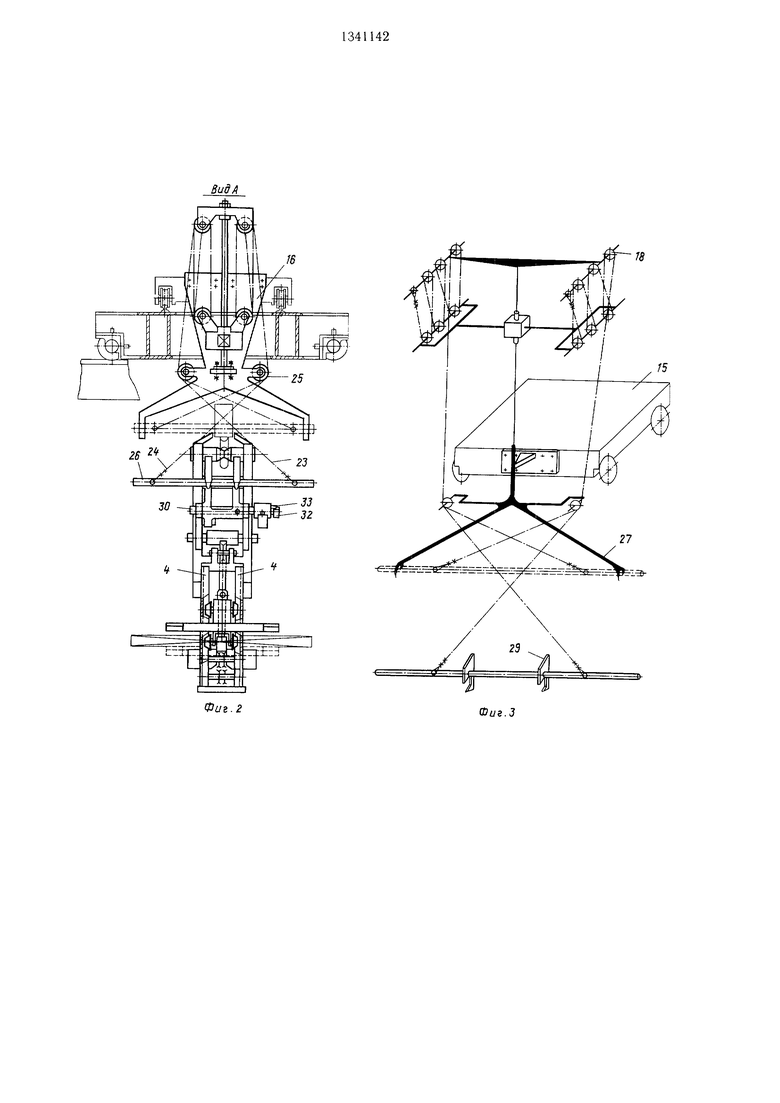
П-образная рама с захватными органами взаимодействует с механизмом предот- враш,ения разворотов с помощью механизма зацепления, установленного на кронштейнах 28 и содержащего рычаг 29, установленный на валу 30 и кинематически свяЦель изобретения - повышение удобст- Ю занный с перекидным грузом 31 с помощью
30
ва эксплуатации при двустороннем обслуживании расположенных в неудобных местах стеллажей и штабелей.
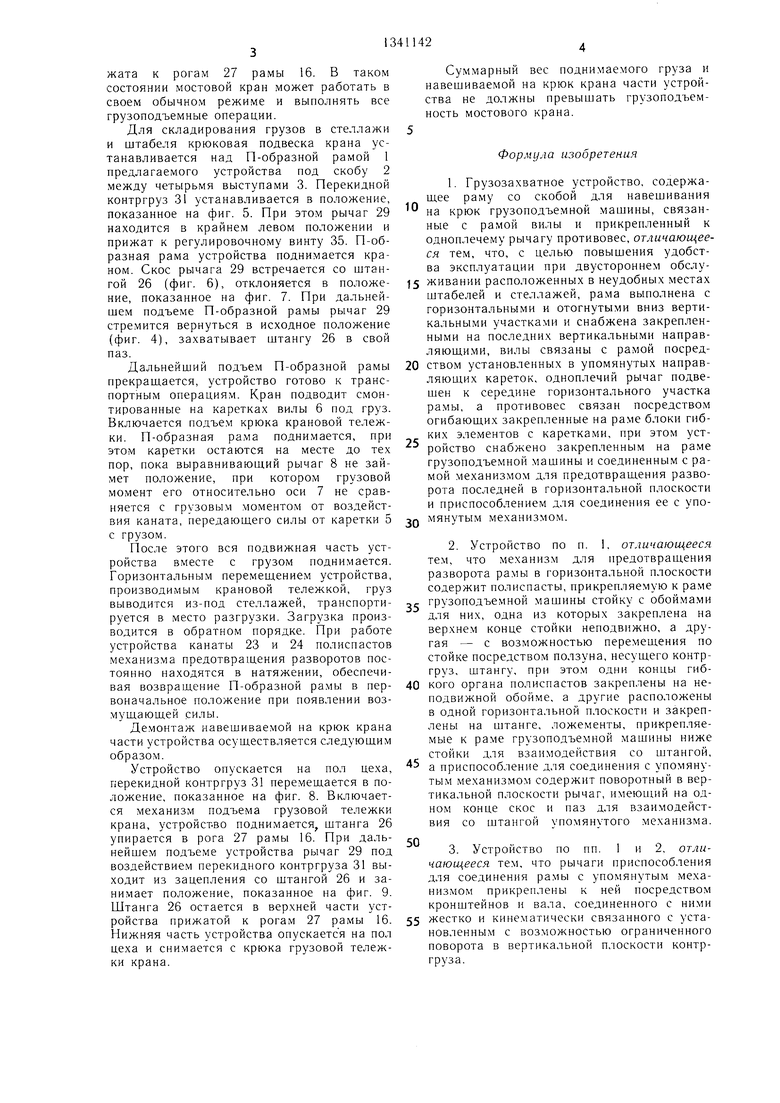
На фиг. 1 показано предлагае.мое устройство, общий вид; на фиг. 2 - вид А , на фиг. 1; на фиг. 3 - схема полиспастов; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - фиг. 9 - то же, в разные моменты взаимодействия со штангой механизма предотвращения разворотов П-образной рамы в горизонтальной плоскости.
Грузозахватное устройство к крюковой подвеске грузоподъемной машины, для складирования грузов в стеллажи и штабеля содержит П-образную ра.му 1 со скобой 2 для навешивания на крюк грузовой грузоподъе.мной машины. В верхней части рама имеет четыре выступа 3, обхватывающие с минимальным зазором обойму крюковой подвески и ориентирующие П-образную раму в горизонтальной плоскости во время монтажа устройства.
В нижней части рамы выполнены вертикальные направляющие 4, иа которых установлены каретки 5 с закрепленными на них захватными органами 6, выполненными в виде вил. В средней части П-образной рамы закреплена ось 7, на которой установлен рычаг 8 с контргрузом. Рычаг связан с захватными органами 6 с помощью канатов 9 и 10, закрепленных одним концом в нижней части рычага 8, а - на каретке 5 с захватным органом через отклоняющие блоки 11, уст- новленные на поперечинах 12 П-образной рамы 1, и блоки 13 и 14, установленные в нижней части П-образной рамы.
На грузовой крановой тележке 15 мостового крана закреплена рама 16 механизма предотвращения разворотов П-образной 45 рамы в горизонтальной плоскости, на которой смонтирована стойка 17, содержащая обоймы 18 и 19 полиспастов, при этом обоймы 18 закреплены неподвижно на траверсе 20, а обоймы 19 - с возможностью перемещения посредством ползуна 21, несущего груз 22, а канаты 23 и 24 закреплены верхними конца.ми на неподвижной обойме полиспастов, затем последовательно огибают все -блоки неподвижкулачка 32, выполненного на концах вала 30 и толкателя 33, закрепленного на шайбе 34 контргруза 31. На кронштейне 28 установлен также регулировочный винт 35 с контргайкой 36, фиксирующий рычаг 29 в крайнем левом положении.
Вес ползуна 21 с грузом подбирается с учетом преодоления сил сопротивления в полиспасте, сопротивления перемещению ползуна по стойке 17 и обеспечения натя- 20 жения канатов между блоками 25 и точками закрепления на штанге 26 в то время, когда штанга 26 взаимодействует с П-образной рамой с помощью механизма зацепления.
Натяжение в канате равно
р -Br...li
t.2. COSdl
где Р - сила, возникающая в горизонтальной плоскости на конце вил; 11- расстояние от точки подвеса на крюке грузовой крановой тележки до оси штанги 26;
la - расстояние от точки подвеса на крюке крана до крайней точки вил или точки приложения горизонтальной нагрузки;
а - угол между горизонталью и направлением каната, идущего от штанги 26 к блоку 25.
Высота обслуживания устройством равна произведению числа ветвей полиспаста, за- 40 ключенных между наборами блоков на траверсе и ползуне, на свободный ход ползуна от нижнего его положения до соприкосновения наборов блоков на траверсе и на ползуне.
Вес поднимаемого груза Qrp равен
Q,.sinp., где Р - вес рычага 8;
|3 - угол, на который отклоняется рычаг при приложении груза Qrp к вила.м. Неуравновешенность рамы 1 от приложения сил натяжения канатов 23 и 24 компенсируется весом механизма зацепления.
Для подготовки устройства к работе механизм предотвращения разворотов П-образной рамы в горизонтальной плоскости, состоящий из узлов и деталей 16-25,
35
50
ных 18 и подвижных 19 обойм, смонти-ГС монтируют на грузовой тележке мостового
рованных на траверсе и ползуне, сбегаюткрана. При этом ползун 21 находится в
к отклоняющим блокам 25, выполненнымкрайнем нижнем положении и штанга 26
на раме 16, и закрепляются на штанге 26.усилием натяжения канатов 23 и 24 приШтанга 26 в нерабочем состоянии фиксируется с помощью канатов 23 и 24 в выполненные в нижней части рамы 16 рога 27.
П-образная рама с захватными органами взаимодействует с механизмом предот- враш,ения разворотов с помощью механизма зацепления, установленного на кронштейнах 28 и содержащего рычаг 29, установленный на валу 30 и кинематически свя0
5
кулачка 32, выполненного на концах вала 30 и толкателя 33, закрепленного на шайбе 34 контргруза 31. На кронштейне 28 установлен также регулировочный винт 35 с контргайкой 36, фиксирующий рычаг 29 в крайнем левом положении.
Вес ползуна 21 с грузом подбирается с учетом преодоления сил сопротивления в полиспасте, сопротивления перемещению ползуна по стойке 17 и обеспечения натя- 0 жения канатов между блоками 25 и точками закрепления на штанге 26 в то время, когда штанга 26 взаимодействует с П-образной рамой с помощью механизма зацепления.
Натяжение в канате равно
р -Br...li
t.2. COSdl
где Р - сила, возникающая в горизонтальной плоскости на конце вил; 11- расстояние от точки подвеса на крюке грузовой крановой тележки до оси штанги 26;
la - расстояние от точки подвеса на крюке крана до крайней точки вил или точки приложения горизонтальной нагрузки;
а - угол между горизонталью и направлением каната, идущего от штанги 26 к блоку 25.
Высота обслуживания устройством равна произведению числа ветвей полиспаста, за- 0 ключенных между наборами блоков на траверсе и ползуне, на свободный ход ползуна от нижнего его положения до соприкосновения наборов блоков на траверсе и на ползуне.
Вес поднимаемого груза Qrp равен
Q,.sinp., где Р - вес рычага 8;
|3 - угол, на который отклоняется рычаг при приложении груза Qrp к вила.м. Неуравновешенность рамы 1 от приложения сил натяжения канатов 23 и 24 компенсируется весом механизма зацепления.
Для подготовки устройства к работе механизм предотвращения разворотов П-образной рамы в горизонтальной плоскости, состоящий из узлов и деталей 16-25,
5
0
жата к рогам 27 рамы 16. В таком состоянии мостовой кран может работать в своем обычном режиме и выполнять все грузоподъемные операции.
Для складирования грузов в стеллажи и штабеля крюковая подвеска крана устанавливается над П-образной рамой 1 предлагаемого устройства под скобу 2 между четырьмя выступами 3. Перекидной контргруз 31 устанавливается в положение, показанное на фиг. 5. При этом рычаг 29 находится в крайнем левом положении и прижат к регулировочному винту 35. П-об- разная рама устройства поднимается краном. Скос рычага 29 встречается со штангой 26 (фиг. 6), отклоняется в положение, показанное на фиг. 7. При дальнейшем подъеме П-образной рамы рычаг 29 стремится вернуться в исходное положение (фиг. 4), захватывает штангу 26 в свой паз.
Дальнейший подъем П-образной рамы прекрашается, устройство готово к транспортным операциям. Кран подводит смонтированные на каретках вилы 6 под груз. Включается подъем крюка крановой тележки. П-образная ра.ма поднимается, при этом каретки остаются на месте до тех пор, пока выравниваюший рычаг 8 не займет положение, при котором грузовой момент его относительно оси 7 не сравняется с грузовым моментом от воздействия каната, передаюпдего силы от каретки 5 с грузом.
После этого вся подвижная часть устройства вместе с грузом поднимается. Горизонтальным перемещением устройства, производимым крановой тележкой, груз выводится из-под стеллажей, транспортируется в место разгрузки. Загрузка производится в обратном порядке. При работе устройства канаты 23 и 24 полиспастов механизма предотвращения разворотов постоянно находятся в натяжении, обеспечивая возвращение П-образной рамы в первоначальное положение при появлении возмущающей силы.
Демонтаж навешиваемой на крюк крана части устройства осуществляется следующим образом.
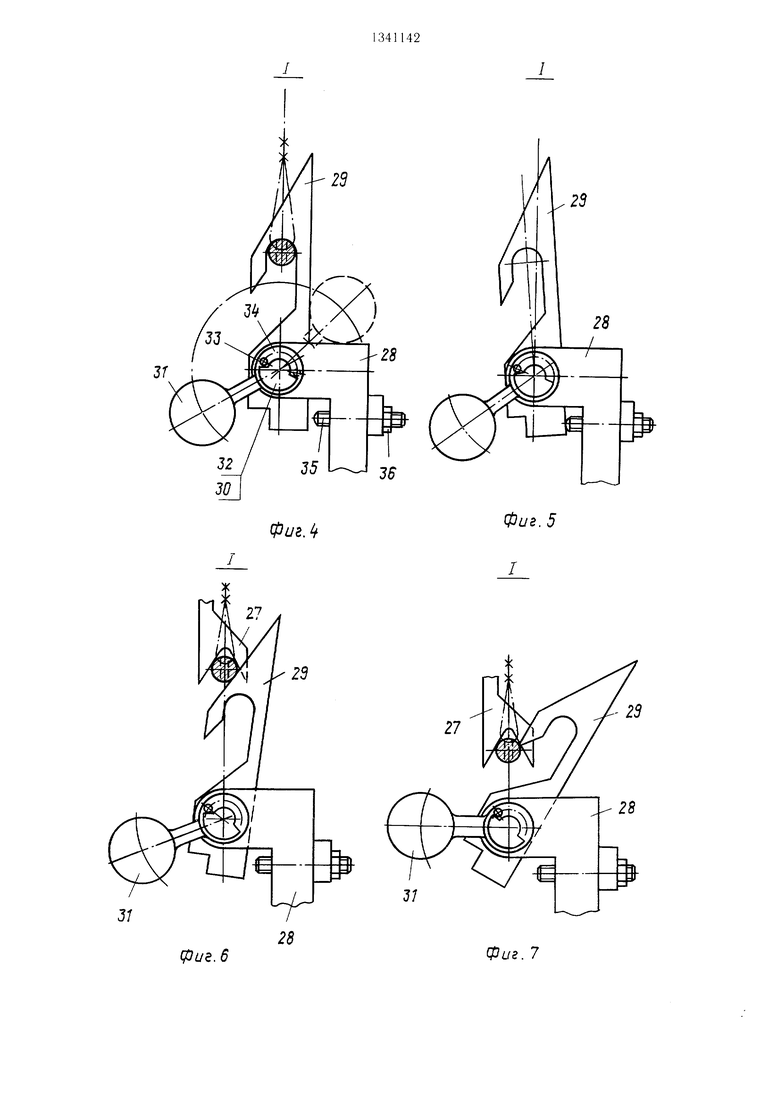
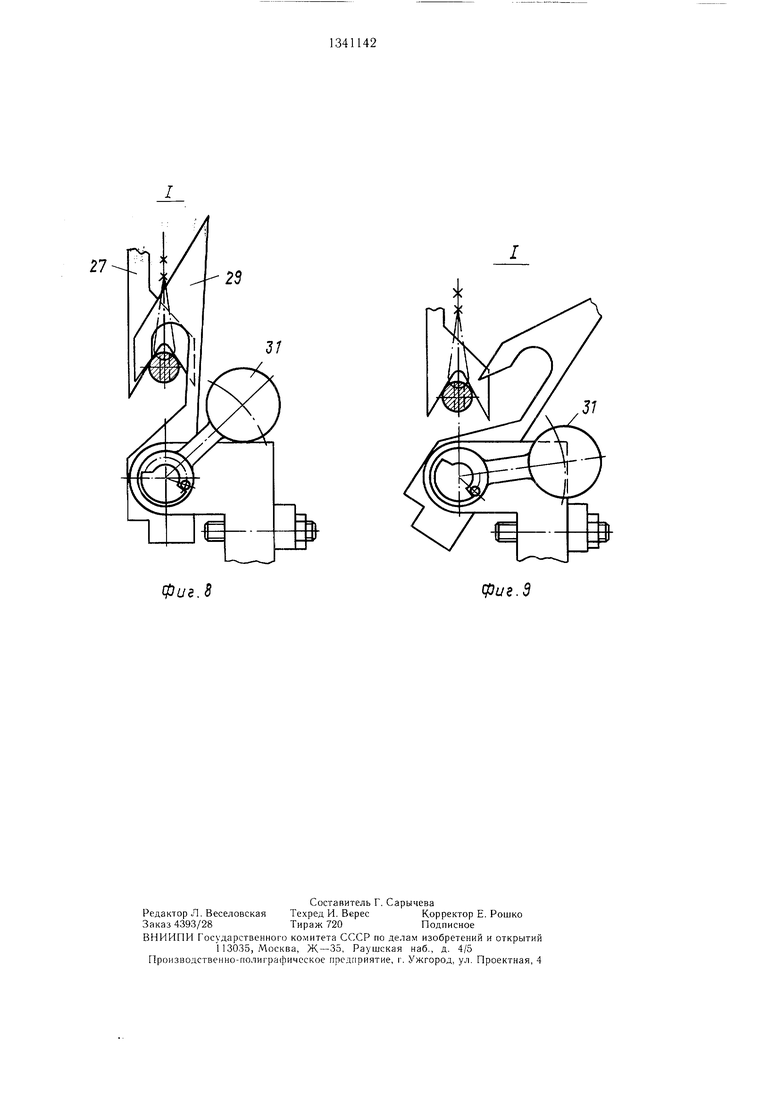
Устройство опускается на пол цеха, перекидной контргруз 31 перемещается в положение, показанное на фиг. 8. Включается механизм подъема грузовой тележки крана, устройство поднимается, штанга 26 упирается в рога 27 рамы 16. При дальнейшем подъеме устройства рычаг 29 под воздействие.м перекидного контргруза 31 выходит из зацепления со штангой 26 и занимает положение, показанное на фиг. 9. Штанга 26 остается в верхней части устройства прижатой к рогам 27 рамы 16. Нижняя часть устройства опускаетс я на пол цеха и снимается с крюка грузовой тележки крана.
Суммарный вес поднимаемого груза и навешиваемой на крюк крана части устройства не должны превышать грузоподъемность мостового крана.
0
Формула изобретения
1. Грузозахватное устройство, содержащее раму со скобой для навешивания
на крюк грузоподъемной машины, связанные с рамой вилы и прикрепленный к одноплечему рычагу противовес, отличающееся тем, что, с целью повышения удобства эксплуатации при двустороннем обслу5 живании расположенных в неудобных местах штабелей и стеллажей, рама выполнена с горизонтальными и отогнутыми вниз вертикальными участками и снабжена закрепленными на последних вертикальными направляющими, вилы связаны с рамой посред0 ством установленных в упомянутых направляющих кареток, одноплечий рычаг подвешен к середине горизонтального участка рамы, а противовес связан посредством огибающих закрепленные на раме блоки гибких элементов с каретками, при этом устройство снабжено закрепленным на раме грузоподъемной мащины и соединенным с рамой механизмом для предотвращения разворота последней в горизонтальной плоскости и приспособлением для соединения ее с упо5
30
мянутым механизмом.
2.Устройство по п. 1. отличающееся тем, что механизм для предотвращения разворота рамы в горизонтальной плоскости содержит полиспасты, прикрепляемую к раме
с грузоподъемной машины стойку с обоймами для них, одна из которых закреплена на верхнем конце стойки неподвижно, а другая - с возможностью перемещения по стойке посредством ползуна, несущего контргруз, щтангу, при этом одни концы гиб0 кого органа полиспастов закреплены на неподвижной обойме, а другие расположены в одной горизонтальной плоскости и закреплены на штанге, ложементы, прикрепляемые к раме грузоподъемной машины ниже стойки для взаимодействия со штангой,
а приспособление для соединения с упомянутым механизмом содержит поворотный в вертикальной плоскости рычаг, имеющий на одном конце скос и паз для взаимодействия со штангой упомянутого механизма.
3.Устройство по пп. 1 и 2, отличающееся тем, что рычаги приспособления для соединения рамы с упомянутым механизмом прикреплены к ней посредством кронштейнов и вала, соединенного с ними
5 жестко и кинематически связанного с установленным с возможностью ограниченного поворота в вертикальной плоскости контргруза.
Вид А
Фиг. г
23
ФигЛ
Фиг. 5
I
23
J7
фи.б
28
Фиг. 7
I
фиг.8
.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемное устройство | 1985 |
|
SU1384525A1 |
| Устройство для обслуживания внутренних частей зданий | 1984 |
|
SU1194823A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Грузовая тележка мостового крана | 1990 |
|
SU1766826A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Мостовой кран | 1980 |
|
SU927729A1 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| Грузоподъемный механизм крана | 1990 |
|
SU1794882A1 |
| Грузоподъёмный механизм (варианты) | 2023 |
|
RU2809870C1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение удобства эксплуатации при двустороннем обслуживании расположенных в неудобных местах стеллажей и штабелей. Грузоподъемное устройство содержит П-образную раму 1, имеюшую скобу 2 для навешивания на крюк грузоподъемной машины, направляющие 4 для кареток 5, на которых закреплены вилы 6, и уравновешивающий рычаг 8 с противовесом, установленный на оси 7 в средней части рамы и взаимодействующими с захватными органами с помощью гибких элементов 9 и 10. Для предотвращения вращения вокруг точки подвески устройство снабжено полиспастным механизмом предотвращения разворотов, установленным на раме, закрепленной на грузовой крановой тележке, и взаимодействующим с навещиваемой на крюк крана частью устройства с помощью механизма зацепления, установленного на кронштейнах в средней части П-образной рамы. При взятии груза из стеллажа рычаг 8 с противовесом отклоняется и уравновешивает раму. Рама фиксируется от разворотов в горизонтальной плоскости упомянутым полиспастным механизмом. 2 з. п. 9 ил. « (Л
| Грузозахватное устройство | 1980 |
|
SU906893A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
