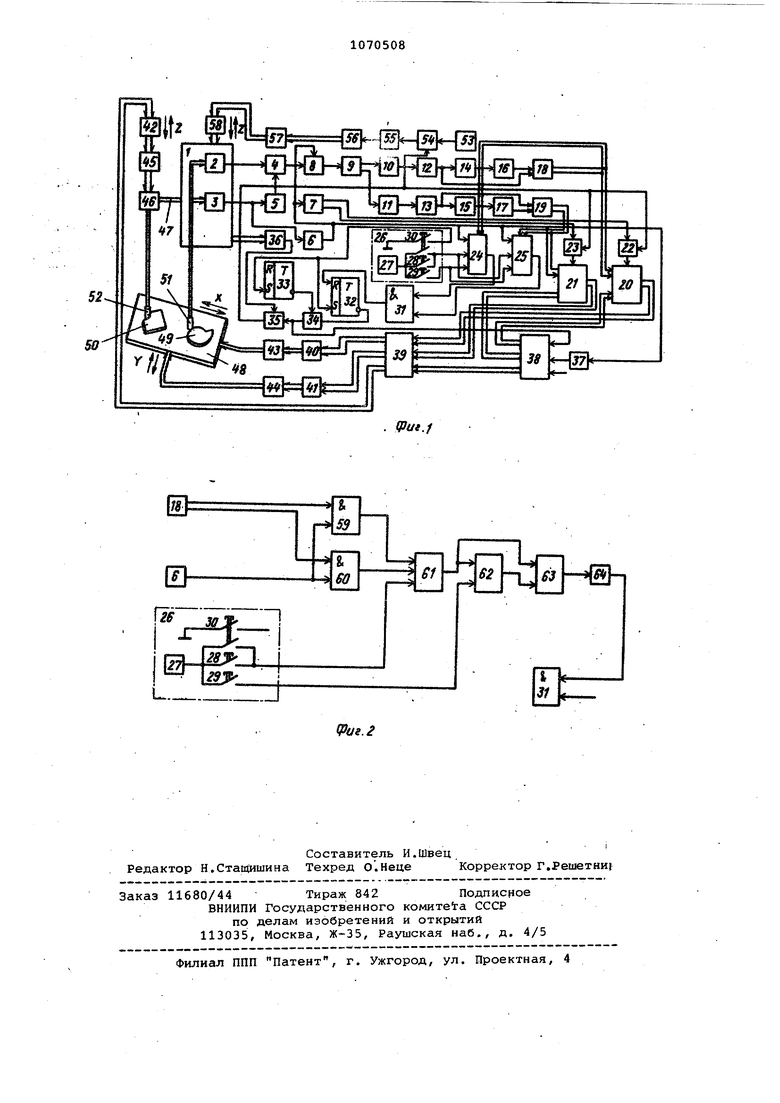
Изобретение относится к автомат ке и быть использовано, например , во фрезерных станках с чис ловым программным управлением. Известно копировальное устройст во, содержащее копировальный прибо с датчиками угла и ошибки, усилитель подач и преобразователь, один вход которого соединен с датчиком угла, второй вход через усилитель ошибки - с датчиком ошибки, а выхо с входом усилителя подач. Кроме того, в устройство введен компенсатор ошибки трения, подключенный своим выходом ко второму входу усилителя ошибки . Недостатками копировального уст ройства являются ограниченные область применения и быстродействяе Наиболее близким к предлагаемом является копировальное следящее ус ройство для станков с программным управлением, содержащее преобразователь сигналов, первый вход котор го соединен с выходом датчика угла копировального прибора, а второй вход через усилитель ошибки - с вы ходом датчика ошибки копировальног прибора, усилитель подач и блок управления приводами 23. Недостатком копировального след щего устройства для станков с программным управлением является его ограниченное быстродействие. Цель изобретения - повышение быстродействия за счет введения автоматического подвода и отвода шпинделя режущего инструмента, копировального прибора и фрезерного стола к профилю обрабатываемой детали. Поставленная цель достигается тем, что в копировальное следящее устройство для станков с программным управлением, содержащее преобразователь сигналов, первый вход которого соединен с выходом датчика угла копировального прибора, второй вход через усилитель ошибки с выходом датчика ошибки, усилител подач, реле касания, первый ключ, формирователь уровня и по каждой координате - логический переключатель и последовательно соединенные блок задания скорости, вы,прямитель, преобразователь напряжение-частота, формирователь эталонных импульсов и двухканальный коммутатор, вход реле касания подключен к выходу датчика ошибки копировального прибора, а выход к управляющему входу первого ключа, информационный вход и выход которого соединены соответственно с выходом преобразователя сигналов и с входом усилителя подач, выходы которого подключены к входа блоков задания скорости, второй вход каждого двухканального коммутатора соединен с выходом выпрямителя, а выходы - с первыми информационными входами логического переключателя данной координаты, вторые информационные входы которых подключены к информационным входам устройства, а выходы - к входам первого блока управления приводом, источник питания, второй ключ, подключенный выходом к управляющему выходу устройства, введены блоки автоматического отвода по двум координатам, пульт управления, третий и четвертый ключи, первый и второй ftS -триггеры, элемент И, второй блок управления приводом, последовательно соединенные источник питания, элемент задержки и второй блок управления, соединенный выходом через механизм привода подачи с копировальным прибором, выход которого соединен с датчиком положения, подключенным выходом к управляющему входу четвертого ключа, информационный вход которого через второй ключ соединен с инверсными выходами первого и второго RS -триггеров, 5 -входы которых подключены к первому выходу пульта управления, соединенного вторым и третьим выходами с первым и вторым входами первого и второго блоков автоматического отвода соответственно, подключенных выходами к первому и второму входам элемента И, выход которого соединен с К -входом первого RS -триггера, третьи входы блоков автоматического отвода подключены к выходам ком 1 утаторов соответствующих координат, а четвертые входы - к выходу реле касания. Блок автоматического отвода каждой координаты содержит два эле.мента И, последовательно соединенные элемент считывания, элемент буферной памяти, элемент сравнения и элементы задержки, ззыход которого подключен к вьасоду блока автоматического отвода, соединенного первыми входами с соответствующими входами элементов И, вторыми входами - с вторыми входами элемента считывания и элемента буферной памяти. На фиг. 1 изображена схема устройства; на фиг. 2 - схема блока автоматического отвода. Устройство содержит копировальный прибор 1 с датчиками угла 2 и ошибки 3, преобразователь 4 сигналов, усилитель 5 ошибки, реле 6 касания, формирователь 7 уровня, ключ 8, усилитель 9 прдач, по двум координатам бЛоки 10 и 11 задания скорости, выпрямители 12 и 13, преобразователи 14 и 15 напряжение-частота, формирователи 16 и 17 эталонных импульсов, двухканальные коммутаторы
18 и 19, логические переключатели 20 и 21, ключи 22 и 23, блоки 24 и 25 автоматического отвода, пульт 26 управления с формирователем 27 импульса и кнопками 28-30, логический элемент И 31, RS -триггеры 32 и 33, ключи 34 и 35, датчик 36 положения, формирователь 37 импульса, вычислитель 39 управления приводами (системы числового программного управления ), шаговые электродвигатели 40 - 42 и механизмы 43 - 45 приводов подачи, шпиндель 46 режущего инструмента, кинематическгш связь 47, стол 48 фрезерного станка, копир {эталонная деталь) 49, обрабатываемую деталь 50, копировальный палец 51, фрезу 52, источник 53 питания, ключ 54, элемент 55 задержки, блок 56 управления приводом, электродвигатель 57, механизм 58 привода подачи.
, На фиг. 2 изображена схема блока 24 автоматического отвода координаты }с, которая содержит два элемента И 59 и 60, элемент 61 считывания, элемент 62 буферной памяти элемент 63 сравнения и элемент 64 задержки..
Схема блока 25 автоматического отвода координаты V аналогична.
Блок 4 представляет собой преобразователь , на входы которого поступают электрические сигналы, носящие инфо 1ацию об угле и ошибке копирования.Преобразователь 4 складывает эти входные сигналы и вырабатывает на выходе напряжение, фаза и амплитуда которого пропорциональна отклонению копировальногопальца 51.
Разделение входной информации усилителей подачи на два выхода происходит с помощью усилителя 9, включающего например, фазовые дийкриминаторы по X и у координатckM.
Стол 48 и шпиндель 46 могут перемещаться от любых существующих элек рических двигателей. Однако выбор электродвигателей определяется конструкцией фрезерного стола и используемого устройства ЧПУ. В данном решении в качестве примера рассматриВсиотся электрические шаговые электрдвигатели 40 -. 42 для перемещения стола 48 и шпинделя 46 через соответствующие механизмы 43 - 45 приводов подач. Схема блока 39 управления шаговым приводом рассматривается на примере У4ПУ типа НЗЗ-1М.
Ключ 8 предназначен для разрешения прохождения информационного сигнала с выхода преобразователя 4 управляющим сигналом с выхода реле 6 касания.
Ключи 22 и 23 предназначены для коммутации сигнала по управляюгиему
входу логических переключателей 20 и 21, Ключ 35 предназначен для коммутации сигнала по управляющему входу ключей 22, 23,и 54.
Принцип работы логических переключателей 20 и 21 и их схемное решение аналогично переключателям известного устройства. .
Устройство работает следующим образом.
0 Устройством предусмотрено два Еюжима работы: Обучение и Обработка .
В режиме Обучение (фиг. 1/ нажатием на кнопку 28 подается
5 сигнал с выхода формирователя 27 импульса на второй управляющий вход блоков 24 и 25 автоматического отвода и подготавливает последние в-режим работы, т.е. содержимое счетчиков платы 61 считывания устанавливается в О (фиг. 2). С пульта управления системы числового программного управления (на фиг. 1 не показан) произвос дится пуск вычислителя 38 и копировальный прибор 1, механически связанный со шпинделем 46 через кинематическую связь 47, перемещается вниз по програ1 ле, записанной на перфоленте, до касания пальца 51
с профилем копира 49. При этом сигнал о механическом контакте (фиг. 1) копировального пальца 51 с копиром 49 поступает на входы датчиков 2 и 3 прибора. Напряжение
5 с датчика 2 поступает на первый вход преобразователя 4. Напряжение с датчика 3 поступает на вход реле 6 касания, а преобразованное в усилителе 5 - на второй вход пре0 образователя 4. На выходе преобразователя 4 появляется сигнал, напряжение, фаза и амплитуда которого пропорциональны отклонению копировального пальца 51, и подается
5 на информационный вход ключа 8.
Сигнал с выхода реле 6 касания отключает вычислитель 38 через формирователь 37 импульса и логические переключатели 20 и 21 через ключи
л 22 тл 23 к через формирователь 7
.уровня. Этот же сигнал с выхода реле 6 касания поступает на управляющий вход ключа 8 и разрешает прохождение сигнала с выхода преобразователя 4 на вход усилителя 9 подачи.
;С}1Гнал с выгсода реле 6 подается на третьи (первый управляющий ) входы блоков 24 и 25 автоматического отвода, подготавливая двухканальныё информационные входы последних к
0 пропусканию импульсов с выходов двухканальных коммутаторов 18 и 19.
В усилителе 9 подачи формируется напряжение по двум координатам X и 3 , соответствующее продольному
5 и поперечному движению стола 48. Напряжение с первого и второго выходов усилителя 9 подачи подается на Бхо.д1:.з выпрямителей12 и 1.3 через блоки 10 и 11 задания скорости В выпрямителях 12 и 13 входное напряжение фильтруется, выпрямляется и подается на входы преобраз вателей 14 и 15, где происходит преобразование напряжения в частот следования импульсов. С выхода пре образователей 14 и 15 импульол под гатся на входы формирователей 16 и 17эталонных импульсов, .в которых формируются импульсы строго опреде ленной др тельности и подаются на первые входы коммутаторов 18 и 19 соответственно, а на вторые входы этих комм,таторов поступают сигнал с выходов выпрямителей 12 и 13, В ко1 ®/ утаторах 18 и 19 происходит распределение сигналов, поступающих с выходом формирователей 16 и 17, либо по первому каналу (прямой ход ), либо по второму какал у (обратный ход ), Импульсы с выходов -коммутаторов 18и 19 подаются на первые, информационные входы логических переклю .чателей 20 и 21, которые зап 3ещают прохождение ложных импульсов по вторым информационным двухканальным входам, поступающих с выхода вычислителя 38. Импульсы с выходов переключателей 20 и 21 поступают н входы блока 39 управления привода f-tH, где образуются в сигналы управления фазовых Обмоток шаговых электродвигателей 40 и 41,. перемещающих стол 48 с помощью соответствующих механизмов 43 и 44 приводов подач. В момент касания .пальца . si- копи ра с профилем 49 и в процессе обхо да -пальцем профиля коп-ира при пере мещении стола 48 импульсы с выходов KOiviMyTaTopoB 1в и 19 поступают в блоки 24 и 25 автоматического отвода по .цвухкамаль.ным информационным входам, .В блоке 24 или 25 (фиг,, 2 информационные импульсы, поступающим по двум каналам с выхода коммута-тора 18, подаются на двухканальный вход элемента 61 считывания через информационные.входы логических элементов И 59 и 60. На управляющий вход последних подан сигнал с выхода реле 6 касания в мо.мент касания пальца 51 профиля контора 49. В элементе 61 (фиг. 21 считываются импульсы, соответствугсш,ие ко--ординатам точек касания пальца 51 с црофилем копира 49. В момент полного обхода пальцем 51 профиля копира 49, нажатием на кнопку 29 производится отвод стола 48 с копиром 49 от копировального дальца 51 и подается сигнал с- выхода формирователя 27 импульса через третий выход пульта 26 управления на первые управляющие входы блоков 24 и 25. В блоке 24 или 25 этот сигнал с третьего выхода пульта 26 поступает на второй вход элемента 62 буферной памяти, который дает разрешение на перезапись считанной информации с выхода элемента 61 считывания в элемент 61 буферной памяти через первый вход последнего. . С выдержкой времени после отрыва пальца 51 от контура копира 49 с пульта 26 производится останов стола 48. С пульта управлениясисTeiviH числового программного управления (ЧПУ) производится подъем копировального прибора 1, кинематически связанного со шпинделем 46 в исходное положение (на фиг. 1 не показ ано ... В режиме Оёработка нажатием на кнопку 30 через первый контакт этой кнопки (выход пульта 26 управления ). подается сигнал на входы триггеров 32 и 33, выходы которых подготавливают первый вход вычислителя 3S к работе через шлход ключа 34 от блоков-24и 25 а.втоматического отвода. . Сигнал с выхода формирователя 27 импульса через второй конта т кнопки 30 (второй выход пульта 26/ подается на второй управляющий вход блоков 24 и 25; При этом содержимое счетчиков элемента 61 считывания устанавливается в: О, На перфоленте записана программа подвода копировального прибора ; и шпинделя 46 . (механически связаншлх между собой }, стола 48 отвода последнего и обработка поверхностей обрабатываемой дета-г . ли 50. С пульта управления ЧПУ (на. фиг, не показан вк;вочает вычислитель 38, в котором начинается отработка программы, записанной на перфоленте Обработанная информация с выхода вьгчислителя 38 поступает в блок 39 управления приводом. Сигнал -с выходу блока 39 управляет шаговым электродвигателем 42, перемещающем шпиндель 46 по 2 -коОрдданате посредство) механизма 45 привода подачи. При этом механически связанные между робЬй через кинематическую связь 47 копировальный прибор 1 и . шпиндель.46 перемещения вниз по программе, записанной на перфоленте. В момент касания копировальногр пальца 31 профиля копира 49 вычислитель 38 автоматически отключается сигналом с выхода реле 6 касания через формирователь 37 импульса и логические переключатели 20 S
и 21 через соответствующие ключи 22 и 23 и через формирователь 7 уровня Обработка сложного профиля детали 50 происходит по копиру 49. В процессе обработки профиля детали 50 происходит обход пальцем 51 профиля копира 49.При этом импульсы, поступающие по двум каналам с выхода коммутатора 18 (.фиг. 2) через элементы И на вход элемента 61 считываются и.подаются на первый вход элемента
63сравнения, на второй вход которого и поступают импульсы с выхода элемента 62 буферной памяти, В элементе 63 происходит сравнение сигналов, соответствующее текущим координатам точек касания пальца 51
с профилем копира 49, в процессе обработки сложного профиля детали 50, с сигналами, записанными в элементе 62 буферной памяти в режиме Обучение (фиг. 1, 2).
В конце обработки сложного профиля детали 50 сигналы с выхода элемента 63 сравнения .через элемент
64задержки каждого блока 24 и 25 поступают на первый и второй входы элемента И 31, который выходным сигналом включает вычислитель 38 через триггер 32, ключ 34 в момент отхода пальца запрещается прохождение сигналов с выходов коммутаторов 18 и 19 через логические переключатели 20 и 21, ключи 22 и 23 формирователь 7 уровня и реле
6 касания. Отвод стола 48 с обработанной деталью 50 и копиром 49 от фрезы 52 и пальца 51 соответственно происходит по числовой программе, записанной на перфоленте. В момент отвода.стола -48 происходит расфиксировка шпинделя 46 от прибора 1 (на фиг. 1 расфиксировка не показана ) и источник 53 питания через ключ 54 с выдержкой времени Достаточной для отвода стола 48, обусловленной элементом 55 задержки, включает блок 56 управления привод сигналом источника 53 питания через ключ 54. При этом включается электродвигатель 57 и копировальный прибор 1 перемещается вверх через механизм 58 привода подачи. При достижении прибором 1 крайне верхнего исходного положения включается датчик 36 положения, который отключает блок 56 управления
привода от источника 53 питания через ключи 35 и 54. Дальнейшее движение прибора 1 вверх прекращается и он останавливается в заданном исходном положении. - Одновременно с отводом прибора 1 вверх фреза 52 может производить, при необходимости, дальнейшую обработку, детали 50 (например, фрезеровка других поверхностей) по программе, записанной на перфоленте. В момент окончания полной обработки детали 50 шпиндель 46 режущего ининструмента отводится в исходное верхнее положение по программе, за.писанной на перфоленте. При достижении шпинделя,46 исходного верхнего положения он механически фиксируется с копировальным прибором 1 через кинематическую связь 47 (для простоты на фиг. 1 механическая фиксация шпинделя 46 не показана.
Таким образом, предлагаемое устройство обеспечивает комбинированноа управление процесса фрезерования детали 50. При этом параметры закона Д1.ижения стола 48 относительно фрезы 52 определяет копировальны прибор 2 при использовании копира 49 для обработки сложного профиля детали 50, а при использовании перфоленты - вычислитель 38 для подвода шпинделя 46 с копировальным прибором 1, стола 48, отвода и дальнейшей обработки других поверхностей детали 50. Отсюда следует что повьалается быстродействие управления за счет комбинированного взаимодействия копира и перфоленты при обработке конструктивно сложной детали за одну установку. Такое комбинированное взаимодействие позволяет расширить технологическую возможность станков с числовым програмкшым управлением, так как обеспечивается обработка не только кулачков со сложным профилем, но и корпусных деталей сложных профилей.
Повышается точность обработки в момент касания фрезы с профилем обрабатываемой детали, в результате того, что информация входа фрезы строго по касательной записана на перфоленте, что исключает брак в виде запила профиля в момент каса-
ВИЯ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Копировальное следящее устройство для управления станком | 1987 |
|
SU1411705A2 |
| Стенд автоматизированного контроля | 1985 |
|
SU1317425A2 |
| НАВИГАЦИОННЫЙ ПРИБОР | 1999 |
|
RU2160431C2 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Стенд автоматизированного контроля | 1983 |
|
SU1267364A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Следящий электропривод для копировального станка | 1978 |
|
SU767701A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
КОПИРОВАЛЬНОЕ СЛЕДЯЩЕЕ УСТРОЙСТЮ ДЛЯ СТАНКОВ С . ПРОГРАЩНЕОМ УПРАВЛЕНИЕМ, содержащее преобразова ель сигналов, первый вход которого соединен с выходом датчика угла копировального прибора, а второй вход через усилитель ошибки - -с в лходом датчика , усилитель подач, реле касания, ггервый ключ, формирователь, уровня и по каждой координате - логический переключатель и последовательно соединенные блок задания скорости, выпрямитель, преобразо- . ватель напряжение-частота, формирователь эталонных импульсов и двухканальный коммутатор, вход реле касания подключен, к выходу датчика ошибки копировального прибора, а выход - к управляющему входу первого ключа, информационный вход и вы.ход которого соединены соответственно с выходом преобразователя сигналов и с входом усилителя подач; .выходы которого подключены к входам блоков задания скорости, второй вход каждого двухканального коммутатора соединен с выходом выпрямителя, а выходы - с первыми информационными входами, логического переключателя данной координаты, вторые информационные входы которых подключены к информационным входам устройства, а выходы - к входам первого блока управления приводом, источник питания , второй ключ, подключенный вы. ходом к управлякицему выходу устройства, отличающееся тем, что, с целью повышения быстродействия , в него введены блоки автоматического отвода по двум координатам, пульт управления, третий и четвертый ключи, первый и второй RS -триггеры, элемент И, второй блок управления приводом, последовательно соединенные источник питания, элемент задержки и второй блок управле- . НИН, соединенный выходом через механизм привода подачи с копировальным прибором, выход которого соёди нен с датчикомположения, подключенным выходом к управляющему входу четвертого ключа, информационный вход которого через второй ключ соединен с инверсными входами перво(Л го и второго R5 -триггеров, S -входы котоЕ их подключены к первому выходу пульта упр.авления, соединенного вторым.и третьим выходами с первым и вторым входами первого и второго блоков автоматического отвода соответственно, подключенных выходами к первому и второму входам элемента И, выход которого соединен с R-входом первого RS-триггера, о трбтьи входы блоков автоматического отвода подключены к выходам коммуСП таторов соответствующих координат, о 00 а четвертые входы - к выходу реле касания. 2. Устройство по п. 1., отличающееся тем, что блок автоматического отвода Ксокдой координаты содерАит два элемента И, последовательно соединенные элемент считывания, элемент буферной памяти, элемент сравнения и элемент задержки, выход которого подключен к выходу блока автоматического отвода, соединенного первыми входами с соответ-ствующилм входами элементов И, вторыми входами - с вторыми входами элемента считывания и- элемента буферной памяти.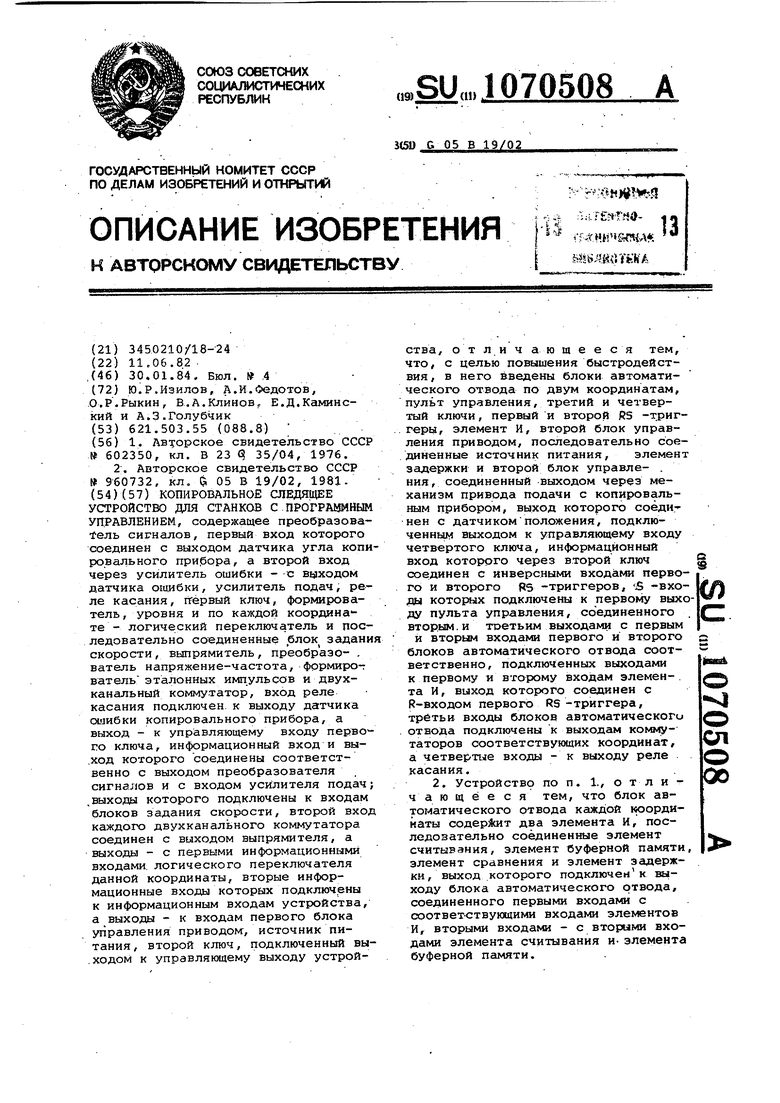
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Копировальное устройство | 1976 |
|
SU602350A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
