Изобретение относится к области автоматики, а именно к рледящим электроприводам, и может быть исполь.зовано в машинаос термической резки 5 металлических листов, в карт9 фическом производстве при гравировании издательских оригиналов карт с составительских оригиналов и т.п.
Известны электроприводы с фото- . Ю электрическим управлением, работающие по чертежу и содержащие фотодатчик с развертывающим устройством, блоки усиления-формирования сигналов фотодатчика, блок управления движе- 5 нием, усилители сигналов управления движением, приводные двигатели и стол с копир-чертежом l .
Наиболее близким к изобретению техническим решением является следя- 20 щий электропривод для копировального станка, содержащий две цепи управления подачами из последовательно соединенных блока ошибки, усилителя мощности, приходного двигателя, редук- 25 тора и механизма перемещения стола, дйа блока управленя движением стола, выходы.которых соединены ссоответствующими входами усилителей мощности, первые входы - со входами блоков 30
ошибок, первым входом блока торможения и выходом усилителя-формирователя рабочей развертки, а вторые входы - с выходом усилителя-формирователя упреждающей развертки, вход которого и вход усилителя-формирователя рабочей развертки соединены с выходами двухразверточного фотодатчика 2 .
К недостатку обоих известных следящих приводов относится наличие значительных ошибок вследствие большого времени формирования сигнала на торможение (влияние инерционности), разброса скорости слежения по подачам при торможении, отсутствия возможности изменять величину торможения как в функции кривизны контура, так и ошибки слежения на прямолинейном участке контура, отсутствия возможности регулировать время сброса и нарастания скорости отслеживания и время движения на сниженной скорости.
Цель изобретения - повышение точности электропривода.
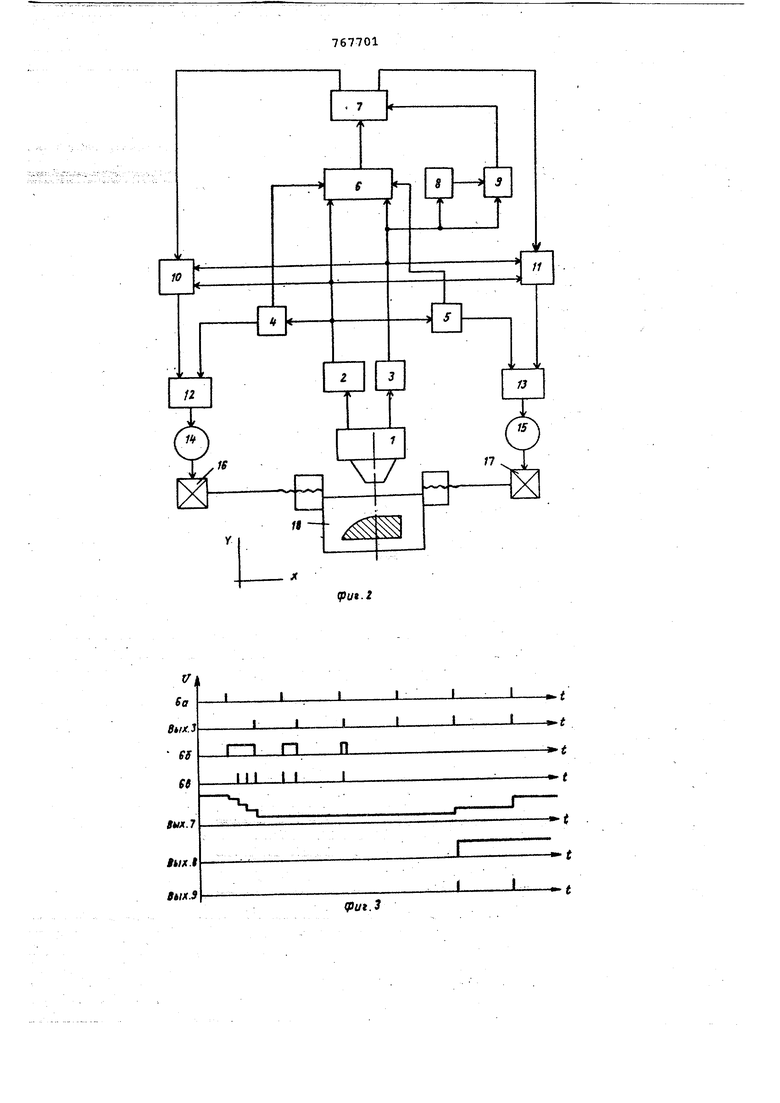
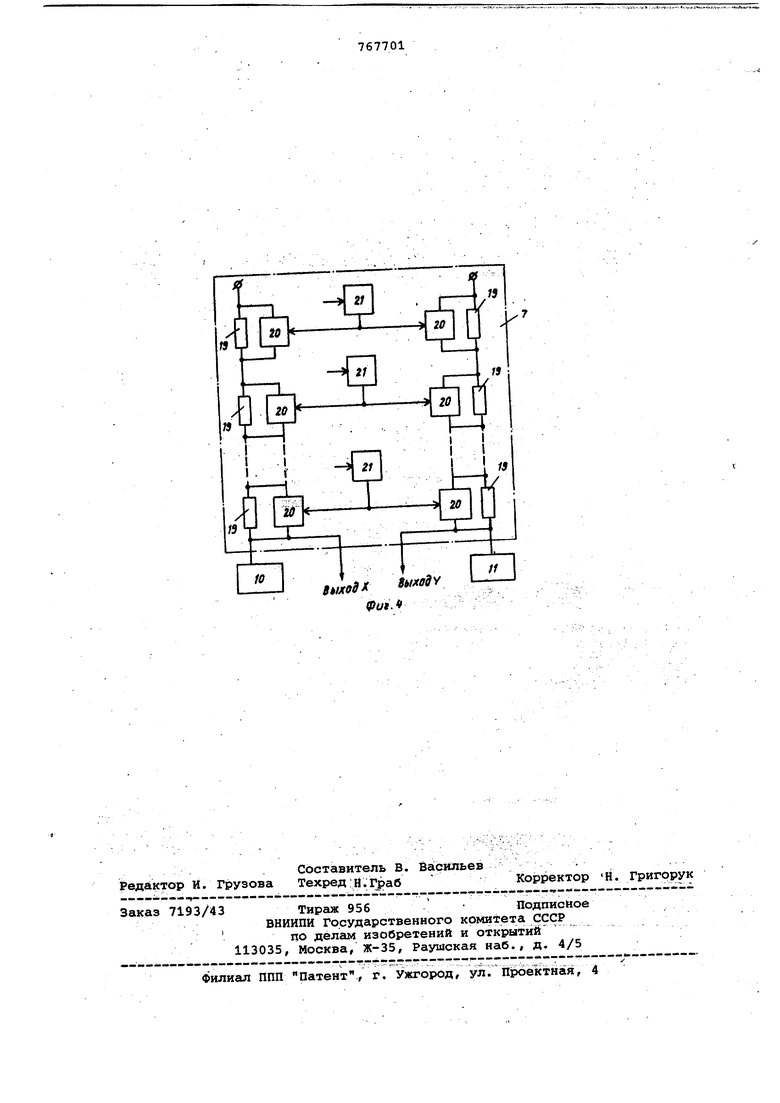
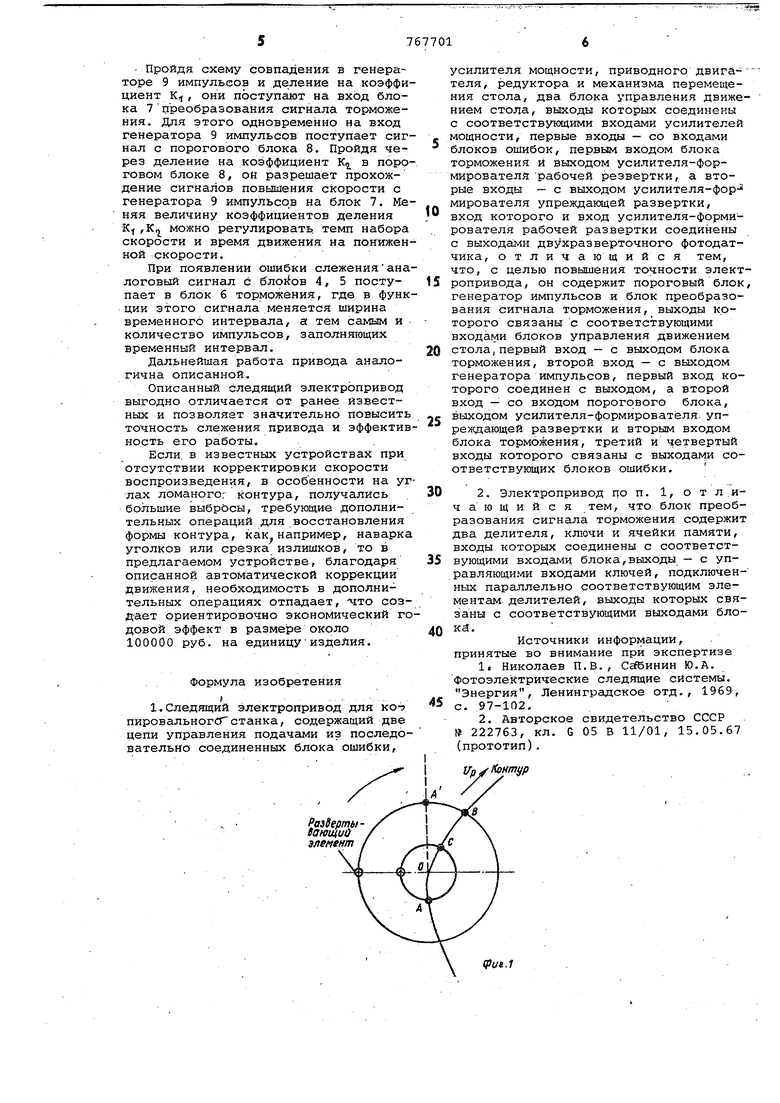
Эта цель достигается тем, что он содержит пороговый блок, генератор импульсов и блок преобразования сиг торможения, выходы которого свя Заныс соответствующими входами блоков управления движением стола, первый вход - с выходом блока торможения, второй вход - с в4аходом генерат ра импульсов, Первый вход которого соединен с выходом, а второй вход - со входом порогового блока, выходом усилителя-формирователя упреждающей, развертки и вторым входом блока торможения, третий и четвертый входы ко торого связаны с выходами соответствукицих блоков ошибки. Кроме того, блок преобразования Сигнала орможёнйя содержит два де лйтеля, ключи и ячейки памяти, входы .Которых соединены с соответствукнцими входами блока, выходы - с управля ощими вход;ами ключей, подключенных йараллельно соответствующим элементам делителей, выходы которых связаны с сбответйтвующими выходами блока.. . , На фиг. 1 изображена схема сканирования участка контура ; на фиг. 2 показана функциональная схема следящ го электропривода; на фиг. 3приведен график, его работы; на фиг. 4 при ведена схема блока преобразования сигнала торможения., Схема сканирования участка контура (фиг. 1) состоит из двух кольцевьк разверток с общим центром в точт.е. рабочей развертки (внут ке О ренняя орбита) и упреждающей (наружная орбита). Точка А и С на орбите рабочей развертки и точка В на упреждающей образуются при сканиров анйй кШтура и являются срответственно точками, в которых образу1бтся . вспомогательный, управляющий и упреж дакнций сигналы. Точка А дйёшётральн противоположна точке А. Фуйкг иЬнальная схема следящего электропривода (фиг. 2) содержит дву райверточный фотодатчик 1, усилители формирователи рабочей 2 и упреждающей 3 разверток, блоки 4 и.5.ошибки,, блок б Торможения., блок 7 преобразоёайия сигнала торможения, пороговый блок 8, генератор 9 импульсов, блоки 10 и 11 управления движением стола, усилители 12 и is мощности, пр1Иводные двигатели 14 и 15, редукторы 16 и 1, механизм 18 перемещения сто ла. Копир-Чертеж имеет возможность перемещаться по координатам X и У. Схема блока преобразования сигнала торможения (фиг. 4) содержит два дёлитёля из элементов делителей 19, ключи 20 и ячейки 21 памяти. В ней тайзкё ,показаны связи с блоками 10 и 11 Управления движением стола. ,. Работа елеДяа,его элёктропривода заключается в следующем. Сигнал, образованный при сканировании контура в точке С рабочей развертки и фиксируемый двухразвергочны Фото-датчиком 1, после формирования и усиления в усилителе-формирователе 2 рабочей развертки поступает в блоки 4, 5 ошибки и одновременно в фазочувствительные схемы блоков 10, 11 управления движением стола для выработки сигнала, управления по углу и будучи усиленный в усилителях 12, 13 мощности управляет приводными двигателями 14, 15. Сигнал, образованный от точки А (фиг. 1) после усиления и формирования в усилителе-формирователе 2 рабочей развертки сдвигается в блоке 6 торможения на 180 эл.гра1Д. Его новая фаза соответствует точке Л. Он изображен на графике U 6а (фиг.З). Сигнал от точки В упреждающей развертки после усилителя-формирователя 3упреждающей развертки (фиг. 2) поступает также в блок 6 торможения. Этот сигнал изображен на графике U вых. 3 (фиг. 3). . При движении по прямой линии при отсутствии ошибки слежения разность фаз между точками А и В равна нулю. движений по участку непрямолинейного контура разность фаз Не равна нулю и в блоке 6 торможения (фиг.2) образуется временной интервал, что изображено на графике U 6б (фиг. 3). Чем больше кривизна контура, тем больше длительность временного интервала. В блоке торможения временной интервал заполняется импульсами от вспомогательного высокочастотного генератора. Чем больше длительность временного интервала, тем больше число импульсов, проходит на выход блока торможения. Ъ блоке 7 преобразования сигнала торможения (фиг 4) пришедшие с блока 6 торможения имадльсы включают ПС1 мере возникновения (поочередно) ячейки 21 памяти, управляющие ключами 20, подключенными параллельно элементам делителей 19, Чем больше включено ключей, тем ниже выходное управляющее напряжение (см. U вых. 7 фиг. 3), а следовательно, и сйорость кбпироваии. Поскольку элементы делителей 19 шунтируютсяГ Попарно одновременно, скорость на каждой подаче изменяется такя(ё одНойременно в одну и ту же величину раз , так как каждый вьгход ячейки 21 памятней Ыйзанчерез ключи 20 с делителя1Лй одной и той же виличины. По мере прйближейия iJteH-rpa копирования к прямЬЛйнеЙнЬму контура временной интервал уменьшается, соофветственне происходит, возврат ячеек - 21 памяти в блоке 7 преобразования сигнала торможения в исходное состояние. Повыщение cKopioctri S одну и ту же ёеличину раз.на каждой подаче осуществляется ш тульсами, сформированными в генераторе 9 (см. U вых. 9 фиг. 3), Ш йхбд ;Kc TopoifО поступает сигнал с усилителя-формирователя 3 упреждаЬхцей развертки. Пройдя схему совпадения в генераторе 9 импульсов и деление на коэффи циент К, они поступают на вход блока 7преобразования сигнала торможения. Для этого одновременно на вход генератора 9 импульсов поступает сиг нал с порогового блока 8. Пройдя через деление на коэффициент К в поро говом блоке 8, он разрешает прохождение сигналов повышения скорости с генератора 9 импульсов на блок 7. Ме няя величину коэффициентов деления К ,К можно регулировать, темп набора скорости и время движения на понижен ной скорости. При появлении ошибки слеженияана логовый сигнал с блоков 4, 5 поступает в блок б торможения, где в функ ции этого сигнала меняется ширина временного интервала, а тем самым и количество импульсов, заполняющих временный интервал. Дальнейшая работа привода анашогична описанной. Описанный следящий электропривод выгодно отличается от ранее известных и позволяет значительно повысить точность слежения привода и эффектив ность его работы. Если, в известных устройствах при отсутствии корректировки скорости воспроизведения, в особенности на уг лах ломаного: контура, получались большие выбрЬсы, требующие дополнительных операций для восстановления формы контура, как, например, наварка уголков или срезка излишков, то в предлагаемом устройстве, благодаря описанной автоматической коррекции движения, необходимость в дополнительных операциях отпадает, то созд-ает ориентировочно экономический го довой эффект в размере около ЮОООО руб. на единицу изделия. Формула изобретения А . . ..,..,,-, 1. Следящий электропривод для ко-з пировальног станка, содержащий две цепи управления подачами из последовательно соединенных блока ошибки,
Контур
(pue.J усилителя мощности, приводного двига- теля, редуктора и механизма перемещения стола, два блока управления движением стола, выходы которых соединены с соответствукяцими входами усилителей мощности, первые входы - со входами блоков ошибок, первым входом блока торможения и выходом усилителя-формирователя рабочей резвертки, а вторые входы - с выходом усилителя-формирователя упреждающей развертки, вход которого и вход усилителя-формирователя рабочей развертки соединены с выходами двухразверточного фотодатчика, отличающийся тем, что, с целью повышения точности электропривода, он содержит пороговый блок, генератор импульсов и блок преобразования сигнала торможения, выходы которого связаны с соответствующими входами блоков управления движением стола,первый вход - с выходом блока торможения, второй вход - с выходом генератора импульсов, первый вход которого соединен с выходом, а второй вход - со входом порогового блока, выходом усилителя-формирователя, упреждающей развертки и вторым входом блока торможения, третий и четвертый входы которого связаны с выходами соответствующих блоков ошибки. 2. Электропривод по п. 1, о т л .ичающийся тем, что блок преобразования сигнала торможения содержит два делителя, ключи и ячейки памяти, входы которых соединены с соответствующими входами блока,выходы - с управляющими входами ключей, подключенных параллельно соответствующим элементам делителей, выходы которых связаны с соответствующими выходами блока. Источники информации, принятые во внимание при экспертизе 1.Николаев П.В., СаЕбинин Ю.А. Фотоэлектрические следящие системы. Энергия, Ленинградское отд., 1969, с. 97-102. 2.Авторское свидетельство СССР 222763, кл. G 05 В 11/01, 15.05,67 (прототип).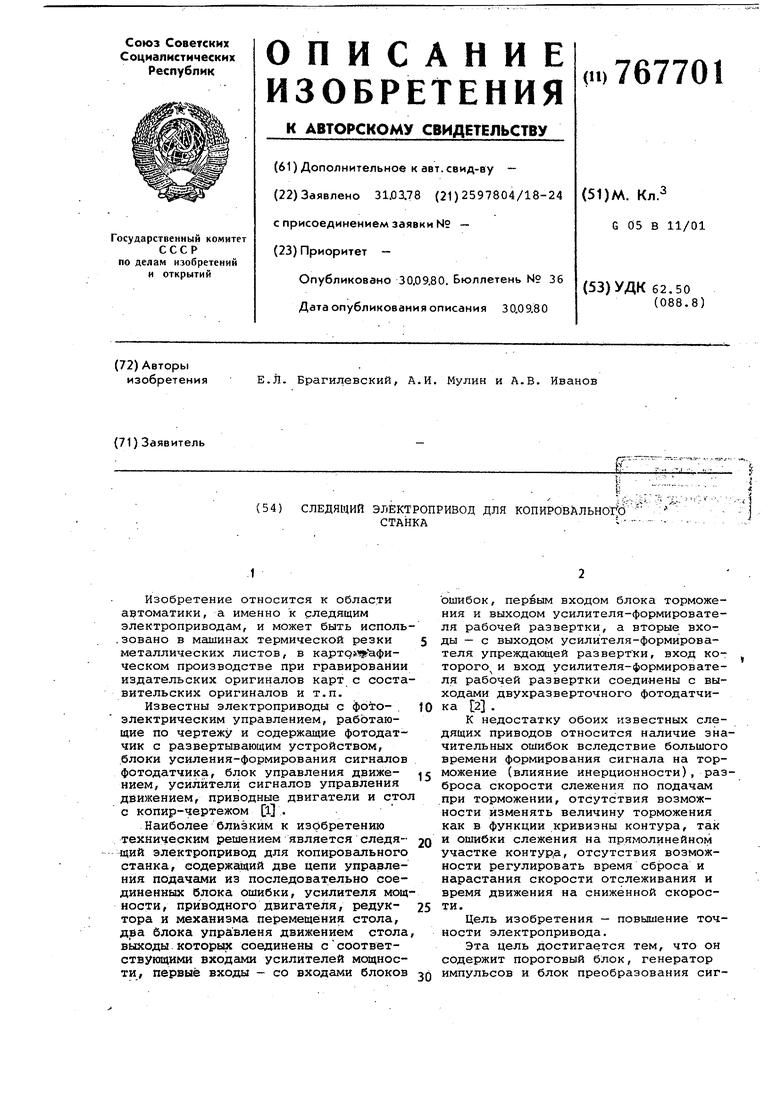
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU388250A1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ФОТОКОПИРОВАЛЬНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 1967 |
|
SU222763A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Следящий электропривод с фотоэлектрическим управлением | 1974 |
|
SU517910A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |