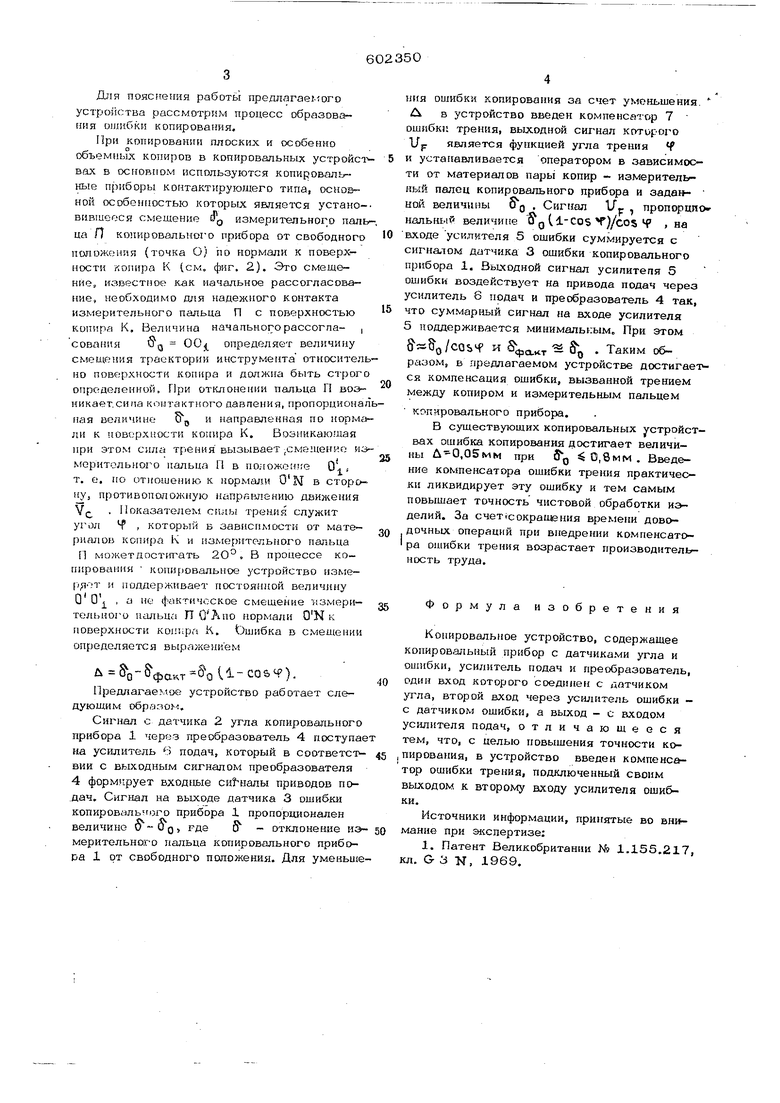
Для пояснения работы предлагаемого устройства рассмотрим процесс образования ошибки копирования. При копировании плоских и особенно объемных копиров в копировальных устройса вах в основном используются копировап1-г№ie приборы контактирующего типа, основной особеиЕюстью которых являе1ч;я установившееся смешенне измерительного паль ца П копировального прибора от свободного положения (точка О) ho нормали к поверхности копира К (см. фиг. 2). Это смешение, известное как начальное рассогласование, необходимо для надежного контакта измерительного пальца П с поверхностью копира К. Величина начапьногорассогпа- , сования §Q 00 определяет величину смещения траектории инструмента относител но поверхности копира и должна быть строг определенной. При отклонении пальца П воз никает.сипа контактного давления,пропорциона ная величине Вд и направленная по норма ли к поверхности копира К. Возкикаюглая при этом CMiii трениявызывает ,с.м8 иенио из мерительного пальца П в поиожелие 0 s т. е. но от)(ошению к )шрмш1И ON в сторо ну, противоположную направлению движения YC. Показателем силы треяия служит угол f , который Б зависимости от мате. . риалов копира К и измермтельного пальца П мoжeтдocт п: aть 2О°, В процессе копирова1И я копировальное устройство язме( и поддерживает постоянной величину О 0 , а не фактическое смещение измерите/1ьного пальца П ОАно нормали ON к поверхности копира К. Ошибка в смешении определяется выражением г о 8факт о11-соьЧ). предлагаемое устройство работает следующим образом. Сигнал с датчика 2 угла копировального црибора 1 через преобразователь 4 поступа на усилитель 6 подач, который в соответст ВИИ с выходным сигналом преобразователя 4 формирует входные приводов по,дач. Сигнал на выходе датчика 3 ошибки копировального прибора 1 пропорционален величине O-UQ, где б - отклонение из мерительного пальца копировального прибора 1 от свободного положения. Для уменьш ия ошибки коцирования за счет уменьшения. Л в устройство введен компенсатор 7 ошибки трения, выходной сигнал которого Up является функцией угла тревия f устаггавливается оператором в зависимости от материалов пары копир измерительный палец копировального прибора и вепкчпаы Од . Сигнал 1/ , пропорцио нальиы величине Q Cl-cos ЧУсох Ч , на входе усилителя 5 ошибки суммируется с сигна-юм датчика 3 ошибки копировального прибора 1. Выходной сигнал усипитепя 5 ошибки воздействует на привода подач через усилитель 6 подач и преобразователь 4 так, что суммарный сигнал на входе усилителя поддерживается минимальным. При этом 8-8о/СОЬЧ и - fio Таким образом, в предлагаемом устройстве достигается компенсация ошибки, вызванной трением между копиром и измерительным пальцем копировального прибора. В существующих копировальных устройствах ошибка копирования достигает величины ,05мм при Sg 0,8мм . Введение компенсатора ошибки трения практически ликвидирует эту ошибку и тем самым повышает точность чистовой обработки изделий. За счет (Сокращения времени доводочных операций при внедрении компенсатора ошибки трения возрастает производительность труда. Формула изобретения Копировальное устройство, содержащее копировальный прибор с датчиками угла и ошибки, усилитель подач и преобразователь, один вход которого соединен с датчиком угла, второй вход через усилитель ошибки с датчиком ошибки, а выход - с входом усилителя подач, отличающееся тем, что, с целью повышения точности копирования, в устройство введен компенсатор ошибки трения, подключенный своим выходом к второму входу усилителя ошибки. Источники информации, принятые во внимание при етсспертизе; 1. Патент Великобритании № 1.155.217, кл. G 3 N, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Устройство для управления копировальным станком | 1980 |
|
SU921785A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДАМИ КОПИРОВАЛЬНОГО СТАНКА | 1970 |
|
SU278361A1 |
| Электромеханическая двухкоординатная следящая система для автоматического копирования контуров произвольной формы | 1954 |
|
SU110990A1 |
| Корректирующее устройство | 1974 |
|
SU525050A1 |
| Копировальный прибор | 1981 |
|
SU996173A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1972 |
|
SU326556A1 |
riElLJ
L
/ y//////////// y/
к
Уфакт
