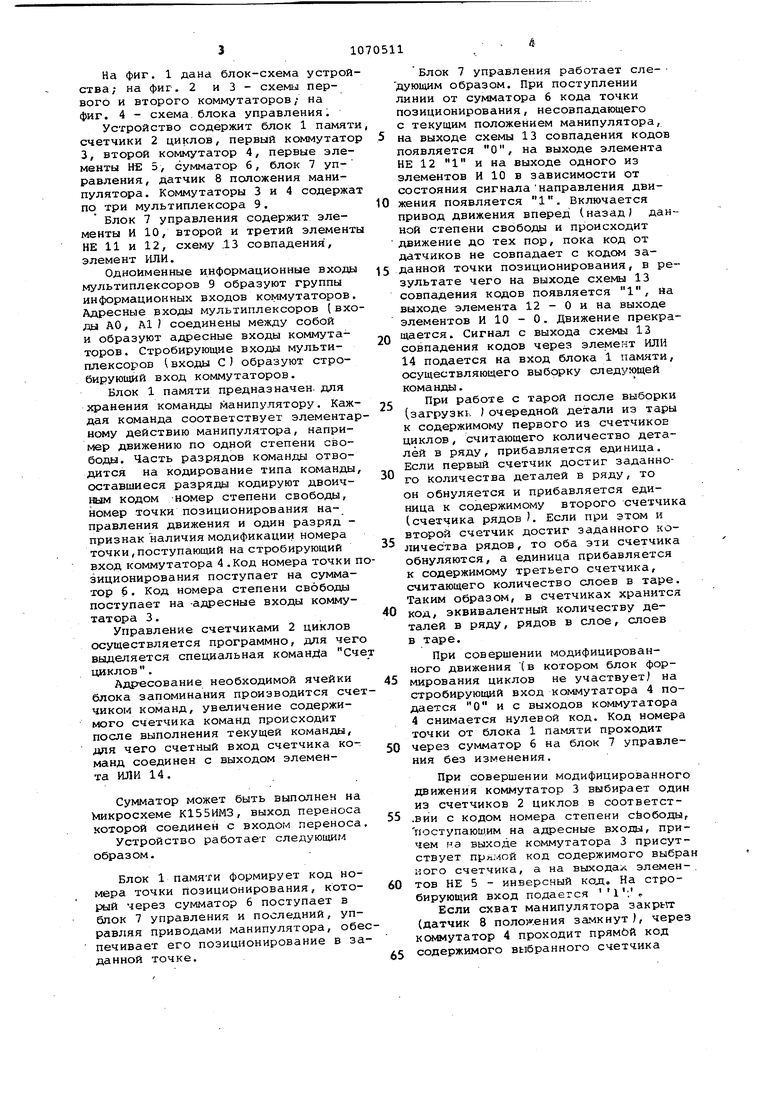
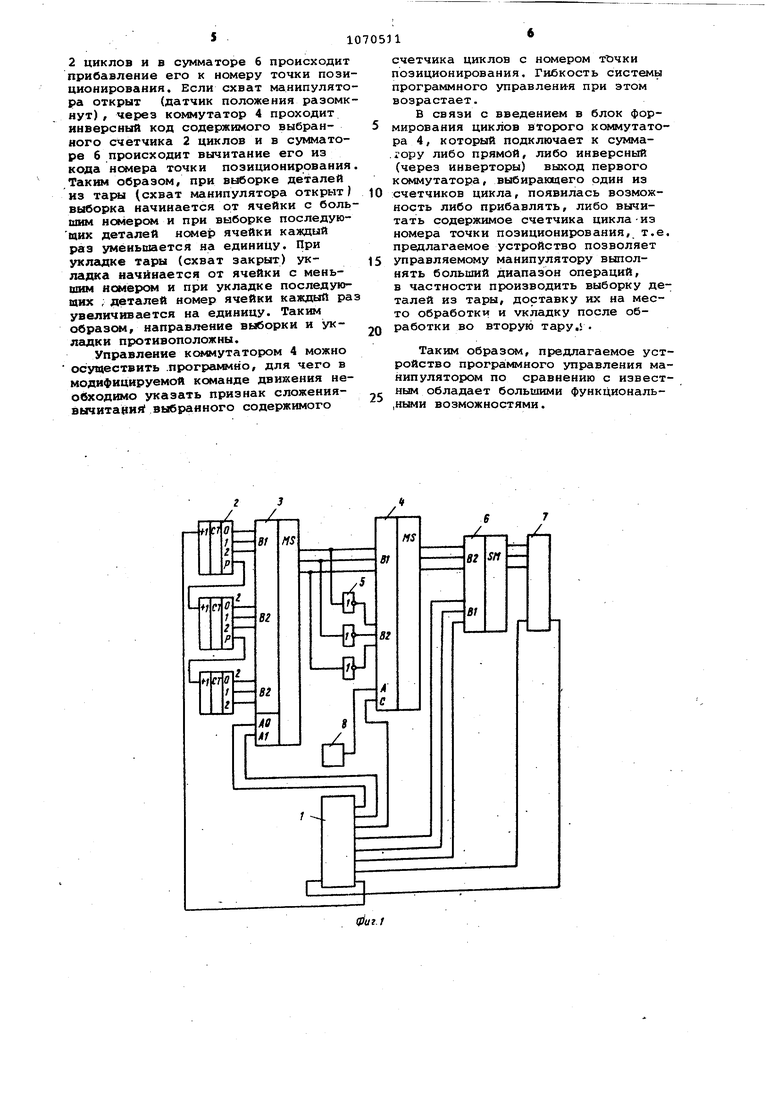
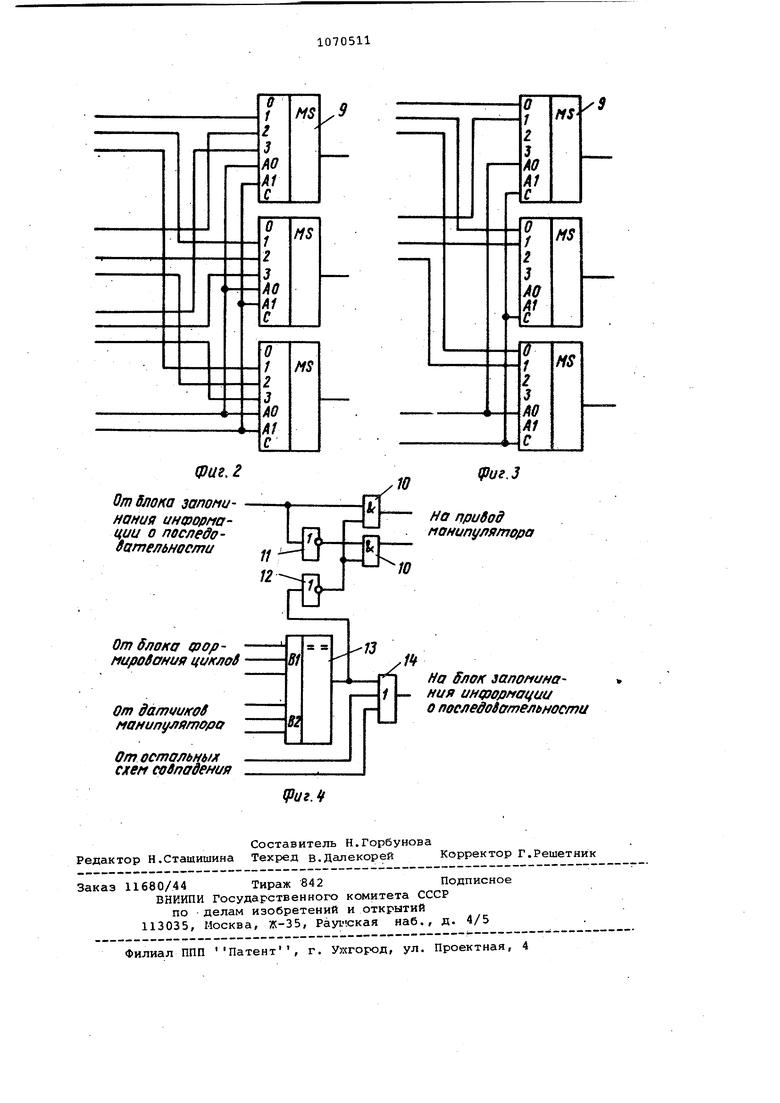
Изобретение относится к роботостроению, а именно к устройствам управления манипулятором. Известны системы программного управления манипулятором, содержащие блок запоминания информации о последовательности, хранящий программу работы манипулятора, бло управления включено-выключено, блок, управления переходами. При воспроизведении программы информация о последовательности выполнения единичных операций ( команд )поступает в блок управления включено-выключено, управляющий приводами манипулятора. При достижении заданного положения звеньями манипулятора срабатывают путевые переключатели, сигнал от которых поступает на блок управления переходами , который инициирует переход к выполнению следующей команды fl К недостаткам данных систем управления следует отнести то, что при необходимости многократного повторения манипулятором некоторой поеледова ельности действий эту последовательность приходится запи сывать в программе столько раз, ск ко ее требуется повторить. Наиболее близким к предлагаемом является устройств, в состав которого включен блок формирования цик лов , содержащий два счетчика циклов , счетные импульсы на которые поступают от схемы управления счет чиками циклов. Счетчики считают количество повторений последовательности действий манипулятора и при отработке его заданное число раз блок управления переходами инициирует переход к команде, следуюцей за отработанными последо вательностями. При работе с упорядоченной таро необходимо осуществление модификации номера точки позиционирования в зависимости от количества повто1 ений последовательности действий, для чего в состав блока управления введен коммутатор с двумя группами входов, соединенными с выходами счетчиков циклов и сумматор номера .точки, одна группа входов которого соединена с выходами коммутатора, а вторая - с выходами блока запоми нания информации о последовательности, определяю11№1ми номер VOMKH позиционирования. Выходы сумматора соединены с входами блока упрайления включено-выключено. При этом один из счетчиков считает количаст во деталей в одном ряду тары, а другой - количество рядов в таре. При выдвижении схата манипулятора к ячейке тары содержимое счетчико циклов через коммутатор счетчиков циклов поступает на сумматор номера точки, в котором-происходит прибавление содержимого йыбранного счетчика циклов к номеру точки позиционирования звена манипулятора. В блок управления включено-выключено от сумматора номера точки поступают модифицированные номера точек позиционирования манипулятора для каждой из степеней свободы анипулятора, осуществляющей движение по направлению укладки деталей в тару. Таким образом, при повторении очередного движения к ячейке тары обеспечивается .выборка каждый раз новой ячейки. Манипулятор, оснащенный такой системой управления, может производить, например, разгрузку тары С 2. Если кроме разгрузки изделий из тары по технологическому регламенту необходима укладка этих изделий в аругую тару, то известное устройство эту задачу выполнить не сможет, поскольку порядок укладки может не совпадать с порядком выборки изделий, в частности разгрузка тары осуществляется сверху вниз, а укладка - снизу вверх. Цель изобретения - расширение функциональных возможностей устройства путем обеспечения операций загрузки и выгрузки одновременно в соответствии с программой. Поставленная цель достигается тем, что в устройство для программного управления манипулятором, содержащее первый коммутатор,подключенный первыми, вторыми и третьими информационными входами к первым выходам соответственно первого, второго и третьего счетчиков импульсов, а адресными входами - к первым входам блока памяти, соединенного вторыми выходами с первыми входами cyn iaтора, подключенного выходами к первым входам блока управления, связанного вторым входом и выходом соответственно с третьим выходом и входом блока памяти, подключенного четвертым выходом к счетному входу первого счетчика циклов, соединенного вторым выходом со счетным входом второго счетчика циклов, подключенного вторым выходом к счетному входу третьего счетчика, датчик положения манипулятора, введены второй коммутатор и три элемента НЕ, подключенные входами к выходам первого .коммутатора и к. первь информациЬнным входам второго коммутатора, а выходами - к вторым информационным входам второго коммутатора, связанного адресным входом с выходом датчика положения манипулятора, стробирующим входом - с пятым выходом блока памяти, а выходом с вторым входом сумматора. На фиг. 1 дана блок-схема устро ства; на фиг. 2 и 3 - схемы первого и второго коммутаторов; на фиг. 4 - схема.блока управления. Устройство содержит блок 1 памя счетчики 2 циклов, первый коммутат 3, второй коммутатор 4, первые эле менты НЕ 5, сумматор 6, блок 7 управления, датчик 8 положения манипулятора. Коммутаторы 3 и 4 содерж по три мультиплексора 9. Блок 7 управления содержит элементы И 10, второй и третий элемен НЕ 11 и 12, схему .13 совпадения, элемент ИЛИ. Одноименные информационные вход мультиплексоров 9 образуют группы информационных входов коммутаторов Адресные входы мультиплексоров (вх ды АО, А1 ) соединены между собой и образуют адресные входы коммутаторов. Стробирующие входы мультиплексоров 1 входы С) образуют стробирующий вход коммутаторов. Блок 1 памяти предназначен, для хранения команды Манипулятору. Каж дан команда соответствует элемента ному действию манипулятора, например движению по одной степени свободы. Часть разрядов команды отводится на кодирование типа команды оставшиеся разряды кодируют двоичным кодом номер степени свободы, номер точки позиционирования направления движения и один разряд признак наличия модификации номера точки(Поступающий на стробирующий вход коммутатора 4 .Код номера точки зиционирования поступает на сумматор б. Код номера степени свободы поступает на -адресные входы коммутатора 3. Управление счетчиками 2 циклов осуществляется программно, для чег выделяется специальная команда Сч циклов. Адресование необходимой ячейки блока запоминания производится сче чиком команд, увеличение содержимого счетчика команд происходит после выполнения текущей команды, для чего счетный вход счетчика команд соединен с выходом элемента ИЛИ 14. Сумматор может быть выполнен на }чикросхеме К155ИМЗ, выход переноса которой соединен с входом переноса Устройство работает следующим образом. Блок 1 памяти формирует код номера точки позиционирования, который через сумматор 6 поступает в блок 7 управления и последний, управляя приводами манипулятора, обе печивает его позиционирование в за данной точке. Блок 7 управления работает еле- дующим образом. При поступлении линии от сумматора 6 кода точки позиционирования, несовпадающего с текущим положением манипулятора, на выходе схемы 13 совпадения кодов появляется О, на выходе элемента НЕ 12 1 и на выходе одного из элементов И 10 в зависимости от состояния сигналанаправления движения появляется 1. Включается привод движения вперед (назад) данной степени свободы и происходит движение до тех пор, пока код от датчиков не совпадает с кодом заданной точки позиционирования, в результате чего на выходе схемы 13 совпадения кодов появляется 1, на выходе элемента 12 - О и на выходе элементов И 10 - О. Движение прекращается. Сигнал с выхода схекы 13 совпадения кодов через элемент ИЛИ 14 подается на вход блока 1 памяти, осуществляющего выборку следующей командам. При работе с тарой после выборки (загрузк. ) очередной детали из тары к содержимому первого из счетчиков циклов, считающего количество деталей в ряду, прибавляется единица. Если первый счетчик достиг заданного Количества деталей в ряду, то он обнуляется и прибавляется единица к содержимому второго счетчика (счетчика рядов . Если при этом и второй счетчик достиг заданного количества рядов, то оба эти счетчика обнуляются, а единица прибавляется к содержимому третьего счетчика, считающего количество слоев в таре. Таким образом, в счетчиках хранится код, эквивалентный количеству деталей в ряду, рядов в слое, слоев в таре. При совершении модифицированного движения (в котором блок формирования циклов не участвует на стробирующий вход коммутатора 4 подается О и с выходов коммутатора 4 снимается нулевой код. Код номера точки от блока 1 памяти проходит через сумматор 6 на блок 7 управления без изменения. При совершении модифицированного движения коммутатор 3 выбирает один из счетчиков 2 циклов в соответст.вии с кодом номера степени свободы, поступающим на адресные входы, причем выходе коммутатора 3 присутствует прямой код содержимого выбран иого счетчика, а на выходах элемен- . тов НЕ 5 - инверсный код. На стробирующий вход подается I;. Если схват манипулятора закрыт (датчик 8 положения замкнут, через коммутатор 4 проходит прямбй кол содержимого выбранного счетчика
2 циклов и в сумматоре б происходит прибавление его к номеру точки позиционирования. Если схват манипулятора открыт (датчик положения разомкнут) t через коммутатор 4 проходит инверсный код содержимого выбранного счетчика 2 циклов и в сумматоре 6 происходит вычитание его из кода нсмера точки позиционирования Таким образом/ при выборке деталей из та1%1 (схват манипулятора открыт) выборка начинается от ячейки с большим номером и при выборке последуюадих деталей ячейки каждый раз уменьшается на единицу. При укладке тары (схват закрыт) укладка начинается от ячейки с меньщнм номером и при укладке последующих ; деталей номер ячейки каждый раз увеличивается на единицу. Таким образом, направление выборки и укладки противоположны.
Управление коммутатором 4 можно осуществить .программно, для чего в модифицируемой команде движения необходимо указать признак сложениявычитания выбранного содержимого
счетчика циклов с номером тЪчки позиционирования. Гибкость системы программного управления при этом возрастает.
В связи с введением в блок формирования циклов второго коммутатора 4, который подключает к сумма.гору либо прямой, либо инверсный (через инверторы) выход первого коммутатора, выбирающего один из
0 счетчиков цикла, появилась возможность либо прибавлять, либо вычитать содержимое счетчика цикла-из номера точки позиционирования, т.е. предлагаемое устройство позволяет
5 управляемому манипулятору выполнять больший диапазон операций, в частности производить выборку деталей из тары, доставку их на место обработки и укладку после об0 работки во вторую тару,; .
Таким образом, предлагаемое устройство программного управления манипулятором по сравнению с известс ным обладает большими функциональ,ными возможностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1982 |
|
SU1083159A1 |
| Устройство для формирования адресов команд и данных | 1985 |
|
SU1312573A1 |
| Устройство сопряжения | 1987 |
|
SU1425691A1 |
| Устройство для ввода информации | 1983 |
|
SU1145336A1 |
| Буферное запоминающее устройство | 1990 |
|
SU1783581A1 |
| Устройство микропрограммного управления | 1983 |
|
SU1188734A1 |
| Устройство для оценки психологической совместимости испытуемых | 1990 |
|
SU1809455A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| Устройство для обработки графической информации | 1988 |
|
SU1674222A1 |
| Процессор для мультипроцессорной системы | 1985 |
|
SU1295410A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРС, содержащее, первый коммутатор, подключенный первыми, вторыми и третьими информационными входами к первым выходам соответственно первого, вторрго и третьего счетчиков импульсов, а адресными входами - к первым выходам блока памяти, соединенного вторыми выходами с первыми входами сумматора, подключенного выходами к первым входам блока управления, связанного вторым входом и выходом соответственно с третьим выходом и входом блока памяти, подключенного четвертым ВЕЛХОДОМ к счетному входу первого счетчика циклов, соединенного вторым выходсм с счетным входом второго счетчика циклов, подключенного вторым выходом к счетному входу третьего счетчика, датчик положения манипулятора, отличающееся тем,что, с целью расширения функциональных возможностей путем обеспечения операций загрузки и выгрузки одновременно в соответствии с программой, в с него введены второй коммутатор и SS три первых элемента НЕ, подклюW ченные входами к выходам первого коммутатора и к первым информационным входам второго коммутатора, а выходами - к вторым информационным входг1м второго коммутатора, свя занного адресным входом с выходом датчика положения манипулятора, стробирующим входом - с пятым выходом блока памяти, а выходом - с вторым входом сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство промышленных роботов | |||
| Сборник | |||
| Л., Машиностроение, 1980, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
