СО
00
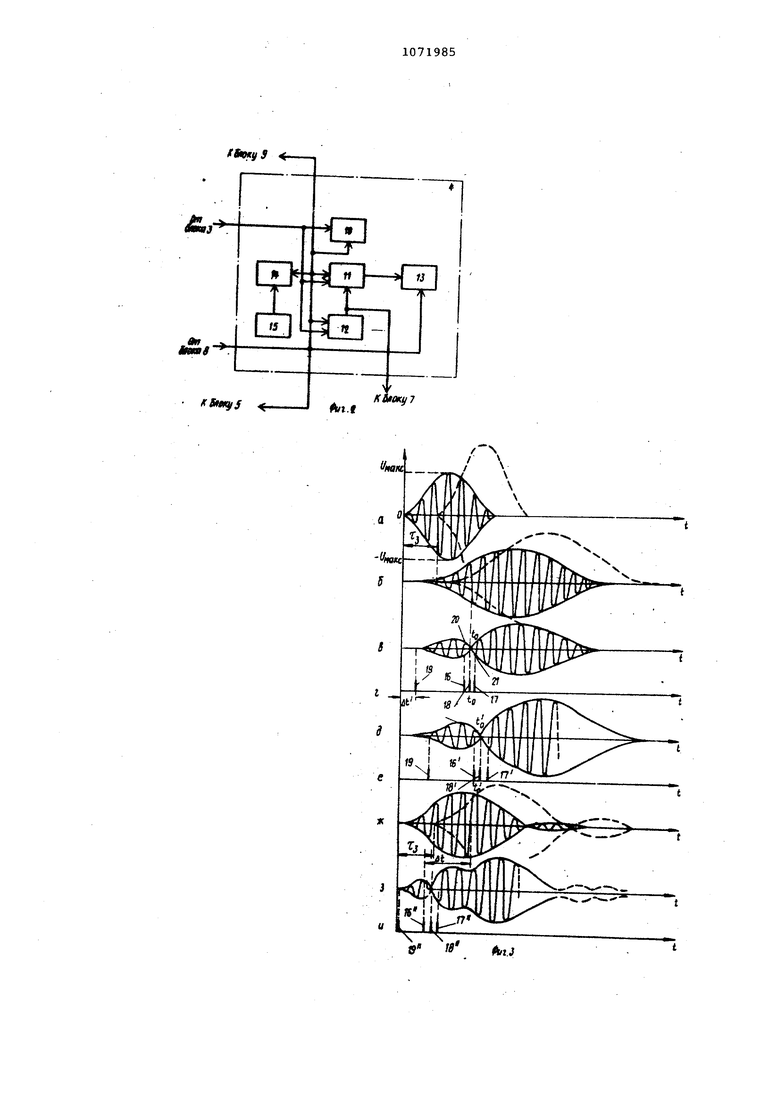
|СП Изобретение относится к радионавигации, может использоваться в при емоиндикаторах импульсно-фаэовых радионавигационных систем. По основному авт. гв. № 576553 известно устройство для измерения временного положения импульса, содержащее последовательносоединенны полосовой фильтр, режекторный фильт блок формирования отсчетной точки и регистратор, последовательно соед ненные анализатор знака рассогласования параметров сигнала, накопитель и коммутатор, причем вход анализатора знака рассогласования пара метров сигнала соединен с выходом блока формирования отсчетной точки,, выход коммутатора соединен с управляющим входом блока формирования отсчетной точки, а управляющие входы анализатора знака рассогласования параметров сигнала и коммутатора соединены с соответствующими выходами регистратора Однако в известном устройстве лз за ошибки измерения, величина кото рой зависит от отнсяяения амплитуд поверхностного сигнала к ионосферному сигналу, снижается точность определения временного положения импульса. Цель изобретения - повышение точ ности измерения в условиях воздейст вия когерентных помех, г{ерекрываю1ЦИХСЯ по спектру и частично во времени с сигналом. Поставленная цель достигается тем, что в устройство для измерения временного положения импульса, содержацее последовательно соединен ные полосовой фильтр, режекторный ;фильтр, блок формирования отсчетной точки и регистратор, последовательно соединенные анализатор знака рассогласования параметров сигнала, накопитель и коммутатор, причем вход анализатора знака рассогласования параметров сигнала сое динен с выходом- блока формирования отсчетной точки, илход коммутатора соединен с управляквцим входом i блока формирования отсчетной точки, а управляющие входы анализатора зна ка рассогласования параметров сигнала- и коммутатора соединены с соот в тствующими выходами регистратора, введены второй накопитель и пороговый блок, причем вход второго накопителя соединен с выходом режекторного фильтра, выход второго накопителя через пороговый блок соединен с управляющим входом полосового фильтра, с вторым управляющим входо коммутатора и вторым входом регистратора, а управляюцщй вход-второго накопителя соединен с третьим выходом регистратора.На .фиг. 1 представлена структурная электрическая схема предложенного устройства; на фиг. 2 - вариант реализации регистратора/ на фиг.З временные диагралвчл, поясняющие работу устройства; на фиг. 4 - амплитудно-частотная (а) характеристика и фазо-частотная (б) характеристика полосового фильтра. Устройство (фиг. 1) содержит поаосовой фильтр 1, режекторный фильтр 2, блок 3 формирования отсчетной точки, регистратор 4, анализатор 5 знака рассогласования параметров сигнала, первый накопитель 6, коммутатор 7, пороговый блок 8 и второй накопитель 9. Регистратор (фиг. 2) содержит блок 10 поиска и допоиска, блок 11 слежения за фазой аасокочаспхэтного заполнения, блок 12 устранения многозначности, блок 13 измерения временного положения, синхронизатор 14 и опорный генератор 15. Устройство работает следуюцуИМ образом. Входная смесь сигнала и помех поступает на полосовой 1 и режекторный 2 фильтры (фиг. 3 а ,Б) . При этом в исходном состоянии полоса пропускания полосового фильтра 1 равна кГц (фиг. 4о(-0). Отфильтрованный сигнал поступает на блок 3 формирования отсчетной точки (фиг. Зв) и далее в регистратор 4. В регистраторе 4 производится измерение временного положения импульса. При этом на этапе поиска производится совмещение формируелмх из напряжения опорного генератора 15 в синхронизаторе 14 опорных стробирующих импульсов 16 - 19 (фиг. 3 г) с любой точкой на радиоимпульсе. Для этого в бло- ке 10 поиска и допоиска производится накопление в точках стробирования. Если временное положение стробирующих импульсов 16 - 19 не совпадает с временем прихода сигнала, то накопление от шума в среднем близко к нулю и после некоторого времени (время анализа) с блока 10 подается команда в синхронизатор 14 на перемещение стробирующих импульсов. Величина временного сдвига выбирается так, чтобы исключить пропуск сигнала. При совпадении времени прихода сигнала с моментами стробирования происходит эффективное накопление в блоке 10 и пф:аз1й этап поиска оканчивается. На втором,этапе осуществляется совмещение Ьтробируюичих импульсов 16 19 с фроногом радиоимпульсов. Эта процедура производится перемещением жестко связанных между собой стробирующих импульсов к началу сигнала с шагом, равным периоду высокочастотного заполнения до тех пор, пока стробирующий импульс 19 не окажется
в самом начале радиоимпульса. При этом накопление в нем становится близким к нулю и поиск оканчивается
Следуюшая процедура - синхронизация временных диаграмм заключается в точной привязке стробирующих импульсов 16, 17, 18 к фазе высокочастотного заполнения. При этом в блоке 11 слежения за фазой 8)егистратора 4 анализируется знак накопления сигна/та в момент действия стробирующего импульса 18 и производится подстройка с помощью следящей система по фазе. При нулевом накоплении процесс синхронизации заканчивается. В связи с возможной неоднозначностью выбора периода высокочастотного заполнения перед измерением выполняется процедура размеатения многозначности фазовых измерений, заключающаяся в совмешейии стробирующих импульсов 16 и 17 с полуволнами 20 и 21 в районе сформированной отсчетной точки о огибающей (фиг. 2 ,в, г) . При этом в блоке 12 устранения многозначности анализируется знак накопления в стробирующих импульсах 16 и 17 относительно отсчетной точки tjj. При правильной установке импульса 18 по фазе высокчастотного заполнения накопление в импульсах 16 и 17 будет иметь соответствующие разные знаки и блок 12 устранения многозначности вырабатывает управляющую команду в блок 13 измерения временного положения на производстве измерения временного интервала. В противном случае стробирующие импульсы 16 - 19 смещаются на период высокочастотного заполнения и п{эоцедура разрешения многозначности повторяется. Измерение временного интервала в блоке 13 производится аналогично описанному в работе известного устройства.
При воздействии частично перекрывакяцихся во времени когерентных помех -типа отраженных от ионосферы сигналов форма результирующего импульса, начиная с момента времени, равного задержке пространственной волны искажается. Изменение формл импульса при L to приводит к появлению рассогласования между истинным t-Q и действительным положением tp временного положения отсчетной точки (фиг. 33). в результате накопления в накопителе 6 срабатывает коммутатор 7, изменяя весовой коэффициент К и происходит ложная коррекция. При этом стробирующиё импульсы 16 - 19 оказываются сдвинутыми вправо по оси времени (фиг. Зе В зависимости от соотношения амплитуд поверхностного и пространственного сигнала Смещение отсчетной точки может достигать нескольких периодов высокочастотного заполнения.
В этом случае коррекция вообще не устраняет ошибки измерения временного положения. В предлагаемом устройстве использована информация о наличии отраженного от ионосферы сигнала, которая появляется вследствие того, что стробирующий импульс 19 оказывается на фронте сигнала. С этой целью стробирующий им.пульс 19 поступает на управляющий вход второго накопителя 9. Результат
0 накопления во втором накопителе 9 подается на вход порогового блока 8, который формирует на своем управляющий сигнал, поступающий одновременно на вторюЯ вход регистрато5ра 4 (для управления синхронизатором 14), на второй управляюцтий вход коммутатора 7 и на управляющий вход полосового фильтра 1. Под действием этого управляющего сигнала синхро0низатор 14 смещает стробируюшие импульсы 16 - 19 влево на заданную величину 4 -t и (фиг. Зи), изменяя параметры полосового фильтра 1 (как будет показано ниже), таким образом,
5 что крутизна фронта радиоимпульса на выходе папрсового фильтра 1 увеличивается (фиг. 3), а коммутатор 7, подключает к управляюпюму входу блока 3 формирования отсчетной точки
0 опорное напряжение Е, изменяет весовой коэффициент К таким образом, что отсчетная точка сдвигается также влево на величину 4-t (фиг. 33), Все величины л1 , ut имеют определен5ные значения., расчитанные заранее по известной величине максимально возможной задержки ионосферного сигнала. Стробирующий импульс 19, таким образом, переводится на начало им0пульса, в результате чего на выходе второго накопителя 9 снова устанавливается напряжение близкое к нулю. Для того управляющее напряжение на выходе порогового блока 8 при этом не изменилось в нем исполь5зуются последовательно включенные компаратор и тактируемый фронтом триггер.
Рассмотрим процессы, происходящие в полосовом фильтре 1.
0
Полосовой фильтр 1 с управляемой характеристикой содержит каскадно включенные звенья 2-го порядка и цепи управляемой обратной связи такие, что при этом реализуется
5 передаточная функция дробного полосового фильтра вида НорМ(р2|
Н(Р/ -777-7-7-77 - (1/
Nfp2|.(.N,
0
:где Р - комплексная частота; «(,N( четные номиналы относительN,(p2),N(p).Ho Р;
HQ - постоянная усиления;
|Jj - коэффициенты обратной связи.
5
Управление задержкой фильтра осуа ствляется следующим образом.
Известно, что групповое время запаздывания фильтра определяется крутизной фазочастотной характеристики (ФЧХ) вполосе пропускания фильтра
В соответствии с формулой (1) ФЧХ фильтра описывается соотношением
f(
f(w)-c(rctgU,M,((uj2,|3.)
групповое время замедления
N(UI
(2
.,,J
При можно представить видеN o)
(3
ЧрЮ
CU
Отсюда видно, что о увеличением ftзнаменатель (3) растет, а f-p %) уменьшается. Вид АЧХ И ФЧХ при разных значениях показан на фиг, 4а, 5, Уменьшение задержки можно связать также с изменением длительности первой полуволны импульсной характеристики. Следствием этого является увеличение крутизны фронта радиоимпуль(Ja на выходе фильтра и уменьшение погрешности от интерференции при поло4ении пространственного сигнала. 1 Положительный эффект предлагаемоj o изобретения заключается в следую1фем. Известноf что измерение временного положения отсчетной точки огибающей является наименее помехоустойчивой процедурой, В связи с Усложняю11}ейся помеховой установкой требования повышения точности измерений приводят к необходимости достижения потенциальных характеристик приемоизмерителя. Применительно к воздействиям в виде белого шума и сосредоточенных помех эта задача решается применением согласованной фильтрации. Обычно используе1юле пол:ооовые фильтры с прямоугольной частотной характеристикой, в этих условиях, должны иметь ширину полосы п4 опускания в соответствии с известным соотношением4 -1, импульсных сигналов РНС Лоран-С с длительностью Т( 200 мкс ширина полосы должна быть порядка 7-10 кГц Минимальная ошибка измерения при этом достигается при формировании отсчетной точки вблизи максимума радиоимпульса. При удалении объектов н расстояния, преклпающие тысячу
и более километров, условия приема характеризуются наличием мешающих ионосферных сигналов, величина задержки которых относительно поверх- ,. ности меньше их длительности; что
делает невозможным применения согласованной фильтрации. В существующих приемоизмерителях по этой причине полоса пропускания полосового фильтра выбирается в 2-3 раза шире,
0 т.е. в пределах 20-30 кГц, а формирование отсчетной точки производится ближе к началу радиоимпульса, где амплитуда сигнала составляет величину (0,3-0,5),. Вследствие
5 этого проигрыш в отношении: сигнал/ /шум достигается 2-3 раз по сравнению с согласованным фильтром без учета возрастающего числа помех, попадающих в более широкую полосу проQ пускания.
В предлагаемом устройстве введение второго накопителя и порогового блока, а также применение полосового фильтра со специальной формой частот5 ной характеристики позволило увеличить точность измерения временного положения импульсного сигнала за счет обеспечение режима, близкого к согласованной фильтрации при отсут ствии отраженных от ионосферы сигналов; увеличения крутизны фронта сигнала при допустимом (до 30%) увеличении шумовой сшибки и уменьшении интерференции с отраженным сигналом, В первом случае полоса фильтра
(фиг. 4а 0) составляет величину порядка 10-12 кГц, а огибающая импульсной характеристики близка по . форме к огибающей радиоимпульса.
Во втором сэтучае форма частотной
0 характеристики изменяется так, что эффективная ширина полосы пропускания фильтра увеличивается приблизительно в 2 раза (фиг. 4а,), а угол наклона фазовой характеристи5 ки в полосе пропускания (фиг. 4а,/5/0) близок к нулю, что приводит к уменьшению величины задержки фильтра в области основной части спектра сигнала. Шследнее эквивалентно увелиQ ченкю 1СРУТИЗНЫ фронта сигнала на выходе фильтра. Увеличение фронта позволяет формировать отсчетную точку ближе к началу радиоимпульса без уменьшения амплитуды сигнала. Позтос му соотношение сигнал/шум ухудшается только за счет увеличения эффективной ширины полосы пропускания, т.е.
в 72 раз или на 30%.
1
Применение предлагаемого устройст0 ва, например, в известном приемоиндикаторе КПИ-5Ф позволит расширить зону приема радионавигационных сигналов без уменьшения точностных характеристик и обеспечить данными о мес5 тонахождении подвижные объекты.
fSmiyS
KSftnfS
Фигл
К Люку 7
/-ч
.3
а
w
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| Устройство для измерения временного положения импульса | 1976 |
|
SU576553A1 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU951214A2 |
| Устройство компенсации нелинейных искажений радиосигналов | 1988 |
|
SU1626395A2 |
| Способ измерения временного положения переодической последовательности радиоимпульсов и устройство для его осуществления | 1977 |
|
SU673944A1 |

УСТРСЖСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ИМПУЛЬСА по авт. св. 576553, Отличающееся тем, что,с целью понлшения точности измерения в условиях воздействий- когерентных помех, перекрывающихся по спектру и частично во времени с сигналом, в него введены второй накопитель и пороговый блок, причем вход второго накопителя соединен с выходом режекторного фильтра, выход второго накопителя через пороговый блок соединен с управляющим входом полосового фильтра, с вторым управляющим вхо- дом коммутатора и вторым входом р егистратора, а управляющий вход второго накопителя соединен с третьим выходом регистратора.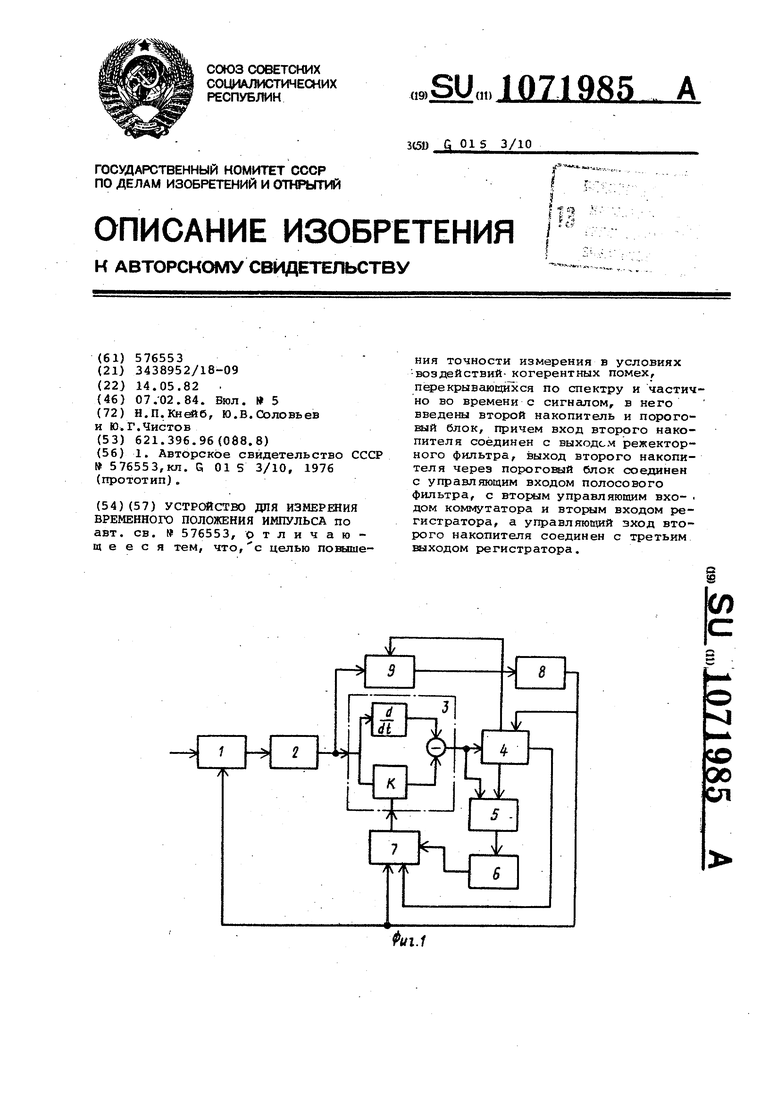
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения временного положения импульса | 1976 |
|
SU576553A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
