(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ИМПУЛЬСА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU951214A2 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |
| Устройство для измерения временного положения импульса | 1976 |
|
SU576553A1 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU769484A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU958996A2 |
Изобретение относится к радиолокации и может использоваться в системах точного измерения малых интервалов времени. По основному авт.св. № 576553 известно устройство для измерения временного положения импульса, содер жащее последовательно соединенные полосовой фильтр, рёжекторный фильтр блок формирования отсчетной точки и регистратор и последовательно соединенные анализатор знака рассогласования параметров сигнала, накопитель и коммутатор, причем вход анализатора знака рассогласования параметров сигнала соединен с выходом блока фор мирования отсчетной точки, выход коммутатора соединен с управляющим входом блока формирования отсчетной точки, а управляющие входы анализатора знака рассогласования параметров сигнала .и коммутатора соединены с соответствукедими выходами регистратора 1 . Однако известное устройство имее недостаточную точность измерения. Цель изобретения - повышение точ .ности измерения. Поставленная цель достигается те что в устройство для измерения временного положения импульса, содержащее последовательно соединенные полосовой фильтр, рёжекторный фильтр, блок формирования отсчетной точки и регистратор и последовательно соединенные анализатор знака рассогласования параметров сигнала, накопитель и коммутатор, причем вход анализатора знака рассогласования параметров сигнала соединен с выходом блока формирования отсчетной точки, выход коммутатора соединен с управляющим входом блока формирования отсчетной точки, а управлякадие входы/ анализатора знака рассогласования . параметров сигнала и коммутатора соединены с соответствующими выходами регистратора, введены два усилителяограничителя, последовательно соединенные .фазовый детектор, интегратор и компаратор, а также источник опорного напряжения, выходы которого соединены с соответствующими входами компаратора, выход которого соединен с дополнительным входом блока формирования отсчетной точки, а входы фазового детектора соединены с выхо.дами соответствующих усилителей-ограничителей , входы которых соединены соответственно с выходом полосового
фильтра и вторым выходом режекторного фильтра. .
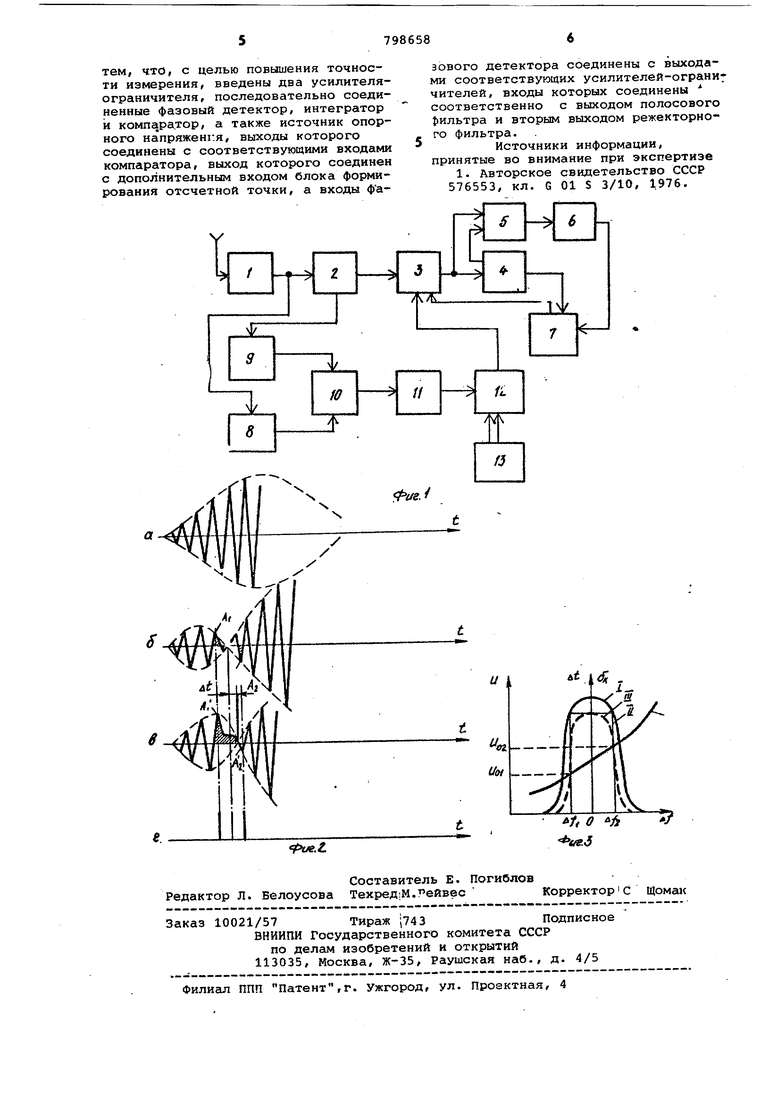
На фиг. 1 -представлена структурная электрическая схема предлагаемого устройства; на фиг. 2 - временные диаграммы, поясняющие его работу, где а - сигнал системы точного времени, б - соответствуюшчй ему неискаженный сигнал на выходе блока формирования отсчетной точки, в - сигнал на выходе блока формирования отсчетной точки при наличии в нем искажений, г - стробирующие импульсы на фиг. 3 - график,поясняющий работу уст:ойства.
Устройство содержит полосовой фильтр 1, режекторный Фильтр 2,блок 3 формирования отсчетной точки, ре;гистратор 4, анализатор 5 знака рассогласования параметров сигнала,накопитель 6, коммутатор 7, усилителиограничители 8 и 9, фазовый детектор 10, интегратор 11, компаратор 12 и источник 13 опорного напряжения.
Устройство работает следующим образом.
На вход режекторного фильтра 2 от антенны через полосовой фильтр 1 поступает смесь полезного сигнала, фиг. 2а, и узкополосной помехи. Режекторный фильтр 2 настраивается на частоту помехи. При этом изменение временного положения отсчетной точки д t за счет искажений частотной характеристики тракта, определяемое искажениями полуволн А а (фиг. 2,б),имеет зависимость, представленную кривой 1 (фиг. 3) Af f - fQ , fц - частота помехи, fg несущая частота принимаемого сигнала.
Зависимость д1 (дЯ) может быть пересчитана в такую зависимость изменения параметров блока 3 формирования отсчетной точки сигнала отчастоты f , при которой временное положение отсчетной .точки будет оставаться практически неизменным. Зависимость S 2.н) Д® к эффициент передачи в канале дифференцирования формирующей схемы представлена кривой II (фиг. 3).
На контуре режекторного фильтра 2 выделяется напряжение синусоидальной помехи, амплитуда которого может меняться в значительных пределах при перемещениях объекта, на котором установлен измеритель. Для того чтобы исключить зависимость напряжения коррекции от амплитуды помехи, сигналы с контура режекторного фильтра 2, с его второго выхода и непосредственно с его входа поступают на усилители-ограничители 8 и 9.
Напряжение на выходе усилителяограничителя имеет вид меандров, причем на выходе усилителя-ограничителя 9 частота первой гармоники меандра равна частоте настройки f режекторного фильтра 2. Полученные меандры поступают на фазовый детектор 10 и далее на интегратор 11, на выходе которого выделяется постоянное напряжение, уровень которого однозначно -соответствует разности частот настройки fц режекторного фильтра 2 и частоты помехи. Это напряжение поступает на компаратор 12. При достижении уровня сигнала на входе компаратора Ug , (фиг. 3) , на его выходе появляется сигнал управления коррекцией отсчетной точки, который сохраняется до тех пор, пока разность частот настройки режекторного фильтра и принимаемого полезного сигнала ,. находится в пределах ,j, а напряжение на входе компаратора лежит в пределах от Ug до U соответствующей напряжению U(,j . При достижении разности частотaf.j, на выходе компаратора 12 появляется сигнал, CJOTветствующий логическому нулю, т.е. отсутствию коррекции отсчетной точки.
При аппроксимации кривой
) прямоугольником III ((1ЧГ.З)
где порогам UQ и 1), однозначно соответствуют разности частот л f и Afg, коррекция в блоке 3 формирования осуществляется только в этом диапазоне разностей частот.
Ошибка коррекции за счет неточности аппроксимации составляет не более 0,2-0,3 МКС. Ошибки, обусловленные нестабильностью элементов в цепи коррекции предложенного устройства, не превышают 0,1 мкс в диапазоне ч-60°С, так как они выполнены на современных широкополосных интегральных микросхемах, а источники опорных напряжений обладают стабильностью в доли процента. Таким образом, практически исключается уход временного положения отсчетной точки при перестройках режекторного фильтра. В то же время рассогласование, обусловленное трассой распространения, составляет 44,5 МКС. С учетом ошибок коррекции, обусловленных неточностью аппроксимации при введенной цепи коррекции 0,2-0,3 МКС, общая ошибка составит 4,3-4,8 МКС, т.е. не превышает кмс на частоте 100 кГц.
Таким образом улучшается точность измерения временного положения импульса в условиях одновременного воздействия искажений сигнала, обусловленных как трассой распространения с плохой проводимостью, так и синусоидальных помех.
Формула изобретения
Устройство для измерения временного положения импульса по авт.св. 5 №576553, отличающеесятем, что, с целью повышения точности измерения, введены два усилителяограничителя, последовательно соединенные фазовый детектор, интегратор и компа ратор, а также источник опорного напряженг.я, выходы которого соединены с соответствующими входами компаратора, выход которого соединен с дополнительным входом блока формирования отсчетной точки, а входы фазового детектора соединены с выходами соответствующих усилителей-ограни чителей, входы которых соединены соответственно с выходом полосового фильтра и вторым выходом режекторного фильтра.
Источники информации, принятые во внимание при экспертизе
