Изобретение относится к радионавигации и может быть использовано в системах точного измерения малых интервалов времени и является усовершенствованием изобретения по авт. св. Isfe 798658.
Целью изобретения является повышение точности измерения временного положения импульса в условиях одновременного воздействия узкополосных синусоидальных помех и полезных радиосигналов, имеющих значительный разбаланс уровней.
Цель достигается включением между выходом фазового детектора и входом интегратора первого коммутатора и между выходом интегратора и компаратором второго коммутатора, а также введением генератора, управляющий вход которого подключен к выходу регистратора, первый выход - к управляющему входу первого коммутатора, а второй - к управляющему входу второго коммутатора.
В результате с помощью введенного генератора в устройстве образуются две последовательности управляющих импульсов, синхронизированных с принимаемыми полезными радиосигналами.
Одна из них, совпадающая по времени с последними, управляет коммутатором, включенным между интегратором и компаратором, и обеспечивает коррекцию сигнала только на время их поступления в регистратор, что позволяет исключить ложное срабатывание компаратора под действием импульсных помех в промежутках между сигналами.
Вторая последовательность управляющих импульсов с генератора поступает на коммутатор, включенный между фазовым детектором и интегратором, при этом на интегратор поступает только напряжение помехи в промежутках между пачками радиосигналов, исключая тем самым их воздействие на напряжение коррекции.
Новые призн.аки с указанной целью в известных источниках информации не обнаружены, что свидетельствует о существенности отличий предложенного технического решения.
На фиг. 1 изображена блок-схема предлагаемого устройства.
Устройство содержит полйсовой фильтр 1, режекторный фильтр 2, блок 3 формирования отсчетной точки, регистратор 4, анализатор 5 знака рассогласования параметров сигнала, накопитель 6, коммутатор 7, усилителя-ограничители 8,9, фазовый детектор 10, интегратор 11, компаратор 12, источник 13 опорного напряжения, коммутатор 14, генератор 15, коммутатор 16.
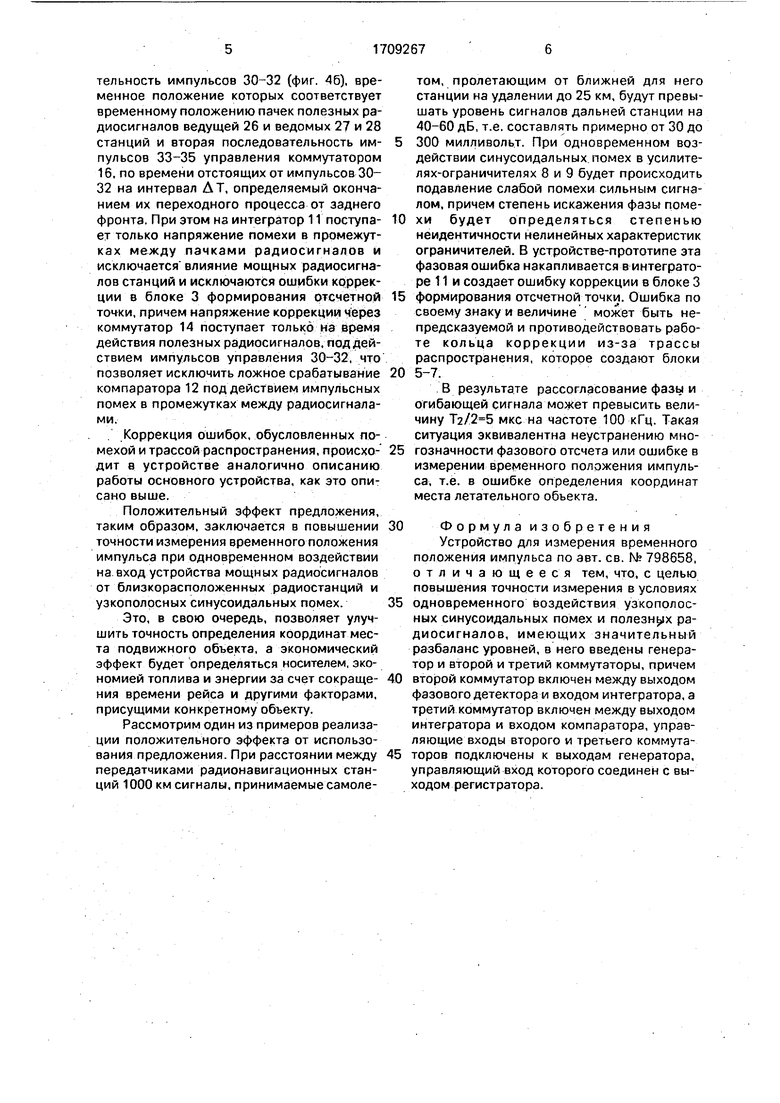
На фиг. 2-4 представлены графики, поясняющие работу устройства.
Здесь обозначены: входной полезный сигнал 17, соответствующий ему неискаженный сигнал 18 на выходе блока 3 формирования отсчетной точки, 19 - тот же сигнал при наличии в нем искажений, стробирующие измерительные импульсы 20, 21, 22 график изменения временного положения
At отсчетной точки за счет искажения частотной характеристики тракта режекторным фильтром At (Af ) , 23 - зависимость к ( Af ), где дк- коэффициент передачи в канале дифференцирования блока формирования отсчетной точки при аппроксимации ее прямоугольником, 24 пересчитанная из графика 22 зависимость бк р2 ( Af ),25-зависимость напряжения на выходе интегратора от частоты настройкирежекторного фильтра, 26 - пачка сигналов ведущей станции (ВЩ) радионавигационной системы, 27 - пачка сигналов первой ведомой станции, 28 - пачка сигналов второй ведомой станции, 30-32
- импульсы генератора 15, управляющие вторым коммутатором в режиме измерения радионавигационного параметра, 33-35 импульсы генератора 15, управляющие первым коммутатором.
Устройство работает следующим образом.
На вхо,арежекторного фильтра 2 от антенны через полосовой фильтр 1 поступает смесь полезного сигнала 17 (фиг. 2а и узкополосной помехи. На контуре режекторного фильтра 2 выделяется напряжение синусоидальной помехи, амплитуда которой может меняться в значительных пределах при перемещении объекта, на котором установлен
измеритель. Для того, чтобы исключить зависимость параметров устройства от амплитуды помехи, сигналы с контура режекторного фильтра 2 с его второго полосового выхода и непосредственно с его
входа поступают на усилители-ограничители 8 и 9. Напряжение на выходе усилителяограничителя имеет вид меандров. Полученные меандры поступают на фазовый детектор 10.
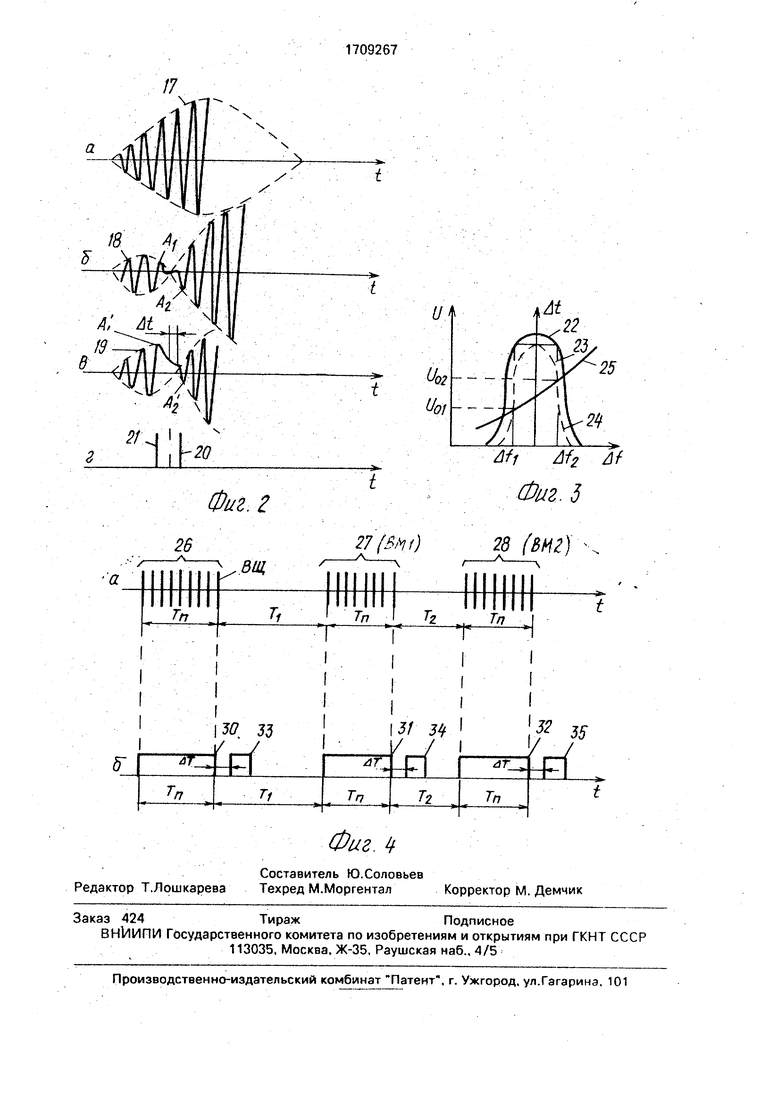
После того, как в регистраторе 4 завершится грубый поиск полезных сигналов и временное положение измерительных стробов будет синхронизировано с временной диаграммой 26-28 принимаемых полезных
сигналов (фиг. 4а), на выходе генератора 15 образуются две последовательности импульсов.
На одном выходе, который соединен с коммутатором 14, образуется поеледовательность импульсов 30-32 (фиг. 46), временное положение которых соответствует временному положению пачек полезных радиосигналов ведущей 26 и ведомых 27 и 28 станций и вторая последовательность импульсов 33-35 управления коммутатором 16, по времени отстоящих от импульсов 3032 на интервал ДТ, определяемый окончанием их переходного процесса от заднего фронта, При этом на интегратор 11 поступает только напряжение помехи в промежутках между лачками радиосигналов и исключается влияние мощных радиосигналов станций и исключаются ошибки коррекции в блоке 3 формирования ртсчетной точки, причем напряжение коррекции через коммутатор 14 поступает только на время действия полезных радиосигналов, под действием импульсов управления 30-32, что позволяет исключить ложное срабатывание компаратора 12 под действием импульсных помех в промежутках между радиосигналами.
Коррекция ошибок, обусловленных помехой и трассой распространения, происходит в устройстве аналогично описанию работы основного устройства, как это описано выше.
Положительный эффект предложения, таким образом, заключается в повышении точности измерения временного положения импульса при одновременном воздействии на вход устройства мощных радиосигналов от близкорасположенных радиостанций и узкополрсных синусоидальных помех.
Это, в свою очередь, позволяет улучшить точность определения координат места подвижного объекта, а экономический эффект будет определяться носителем, экономией топлива и энергии за счет сокращения времени рейса и другими факторами, присущими конкретному объекту.
Рассмотрим один из примеров реализации положительного эффекта от использования предложения. При расстоянии между передатчиками радионавигационных станций 1000 км сигналы, принимаемые самолетом, пролетающим от ближней для него станции на удалении до 25 км, будут превышать уровень сигналов дальней станции на 40-60 дБ, т.е. составлять примерно от 30 до
5 300 милливольт. При одновременном воздействии синусоидальных, помех в усилителях-ограничителях 8 и 9 будет происходить подавление слабой помехи сильным сигналом, причем степень искажения фазы помехи будет определяться степенью неидентичности нелинейных характеристик ограничителей. В устройстве-прототипе эта фазовая ошибка накапливается в интеграторе 11 и создает ошибку коррекции в блоке 3
5 формирования отсчетной точки. Ошибка по своему знаку и величине может быть непредсказуемой и противодействовать работе кольца коррекции из-за трассы распространения, которое создают блоки
0 5-7.
В результате рассогласование фазы и огибающей сигнала может превысить величину МКС на частоте 100 кГц. Такая ситуация эквивалентна неустранению многозначности фазового отсчета или ошибке в измерении временного положения импульса, т.е. в ошибке определения координат места летательного обьекта.
0 Формула изобретения
Устройство для измерения временного положения импульса по авт. св. № 798658, отличающееся тем, что, с целью повышения точности измерения в условиях
5 одновременного воздействия узкополосных синусоидальных помех и полезных радиосигналов, имеющих значительный разбаланс уровней, в него введены генератор и второй и третий коммутаторы, причем
0 второй коммутатор включен между выходом фазового детектора и входом интегратора, а третий коммутатор включен между выходом интегратора и входом компаратора, управляющие входы второго и третьего коммутаторов подключены к выходам генератора, управляющий вход которого соединен с выходом регистратора.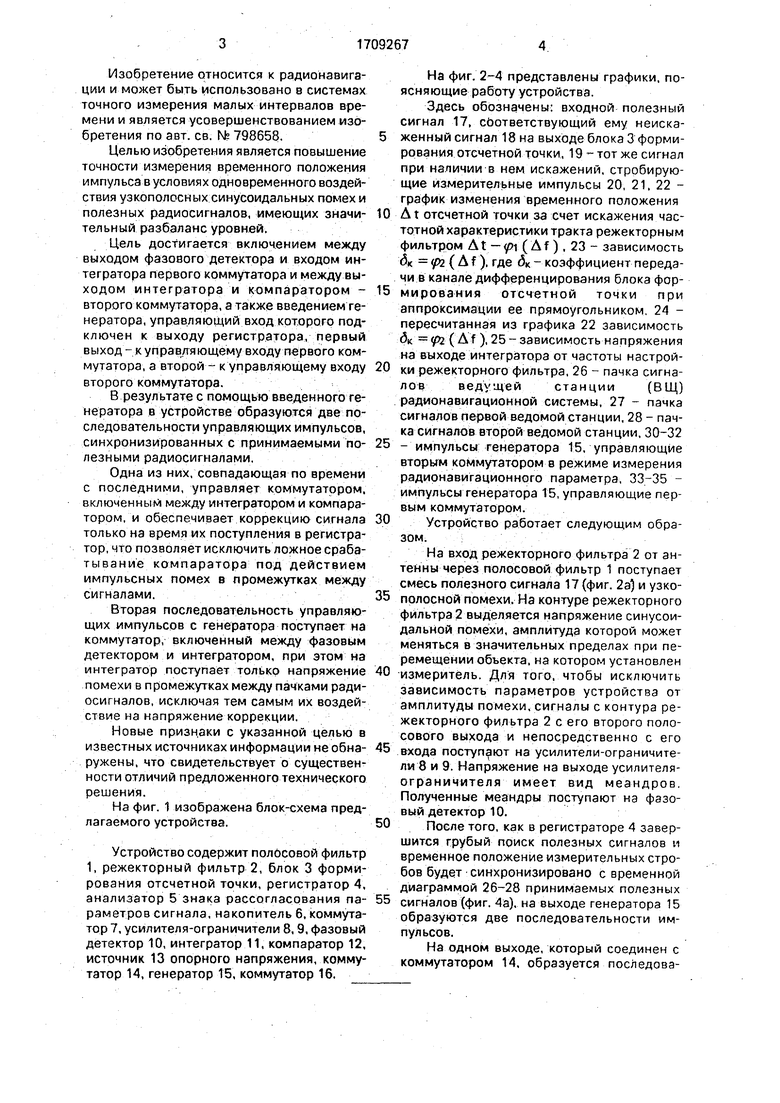
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU769484A2 |
| Устройство для подавления помех | 1983 |
|
SU1095419A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014630C1 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
Изобретение может быть использовано в радионавигации. Цель изобретения - повышение точности измерения в условиях одновременного воздействия узкополосных синусоидальных помех и полезных радиосигналов, имеющих значительный разбаланс уровней. Для достижения цели в устройство для измерения временного положения импульса между выходом фазового детектора 10 и входом интегратора 11 введены коммутатор 16, а между выходом интегратора 11 и входом компаратора 12 - коммутатор. 14. Также введен генератор 15, управляющий вход которого подключен к выходу регистратора 4, а выходы генератора 15 подключены к управляющим входам коммутаторов 14, 16. Устройство содержит полосовой фильтр 1, режекторный фильтр 2, блок 3 формирования отсчетной точки, анализатор 5, накопител!, 6, коммутатор 7. усилители-ограничители 8, 9, источник 13 опорного напряжения. 8 кольце коррекции осуществляется накопление информации о помехе только в отсутствие мощного радиосигнала, что позволило исключить обусловленные им ошибки коррекции и тем самым повысить точность измерения временного положения импульса. 4 ил.слС'XJ о ю ю сь VJ>&гоФиг.1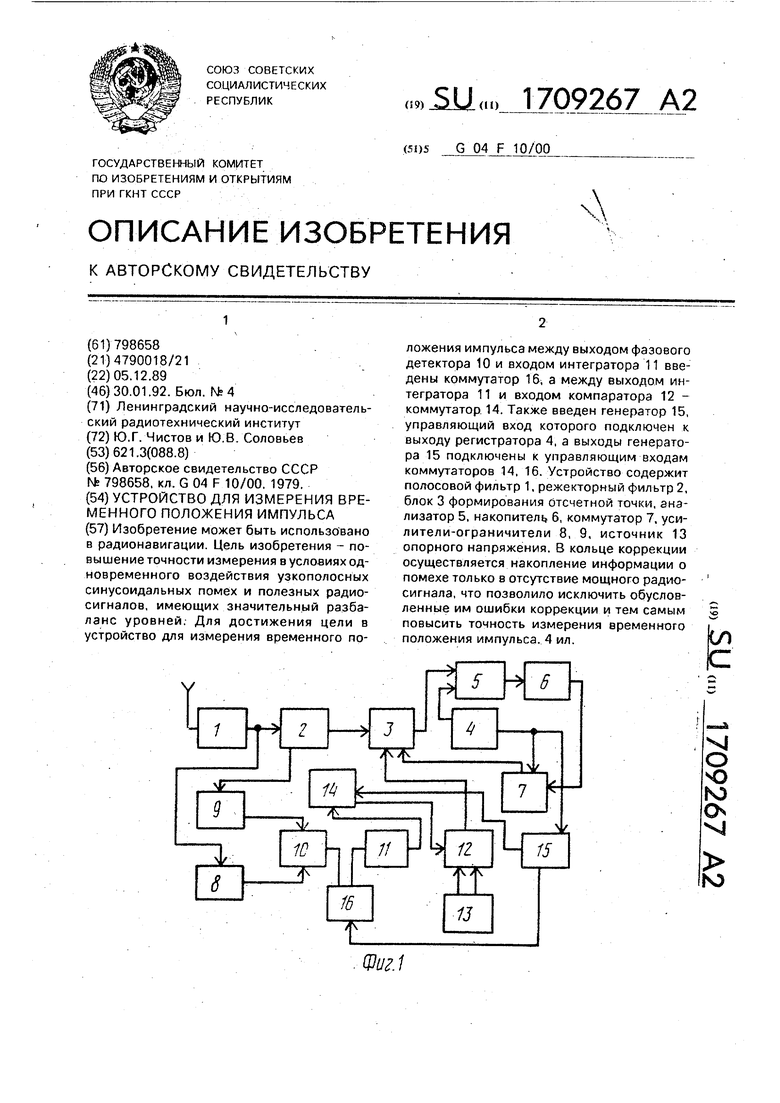
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
