(5) УСТРОЙСТВО для ИЗМЕРЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ИМПУЛЬСА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU951214A2 |
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |
| Устройство для измерения временного положения импульса | 1976 |
|
SU576553A1 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU943634A1 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU769484A2 |
I
Изобретение относится к радионавигации и может использоваться в приемоиндикаторах импульсно-фазовых радионавигационных систем. ,
По основному авт.св. № 576553 известно устройство для измерения временного положения импульса, содержащее последовательно соединенные полосовой фильтр, режекторный фильтр, блок формирования отсчетной точки и регистратор, последовательно соединенные анализатор знака рассогласования параметров сигнала, накопитель и коммутатор, причем вход анализатора знака рассогласования параметров сигнала соединен с выходом блока формирования отсчетной точки, выход коммутатора соединен с управляющим входом блока формирования отсчетной точки, а управляющие входы анализатора знака рассогласования параметров сигнала и коммутатора соединены с соот-ветствующими выходами регистратора l.
Однако известное устройство имеет недостаточную точность при воздействии синусоидальных помех.
Цель изобретения - повышение точности- измерения в условиях одновременного воздействия сигнала и синусоидальных помех.
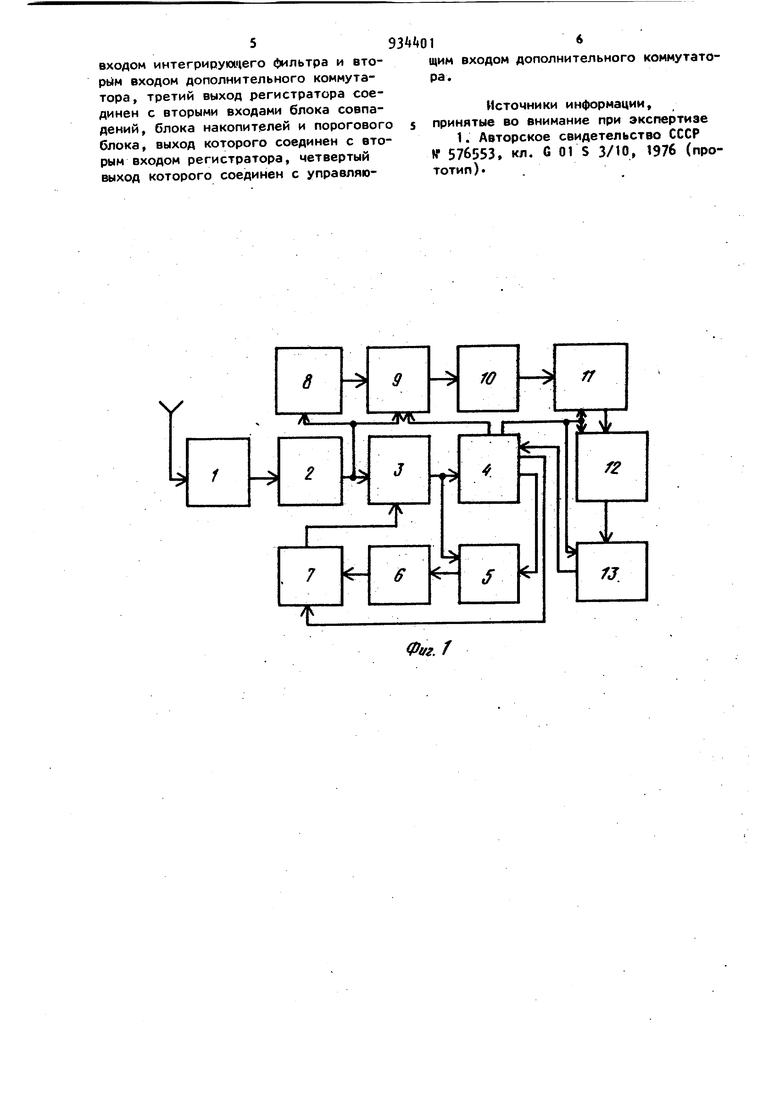
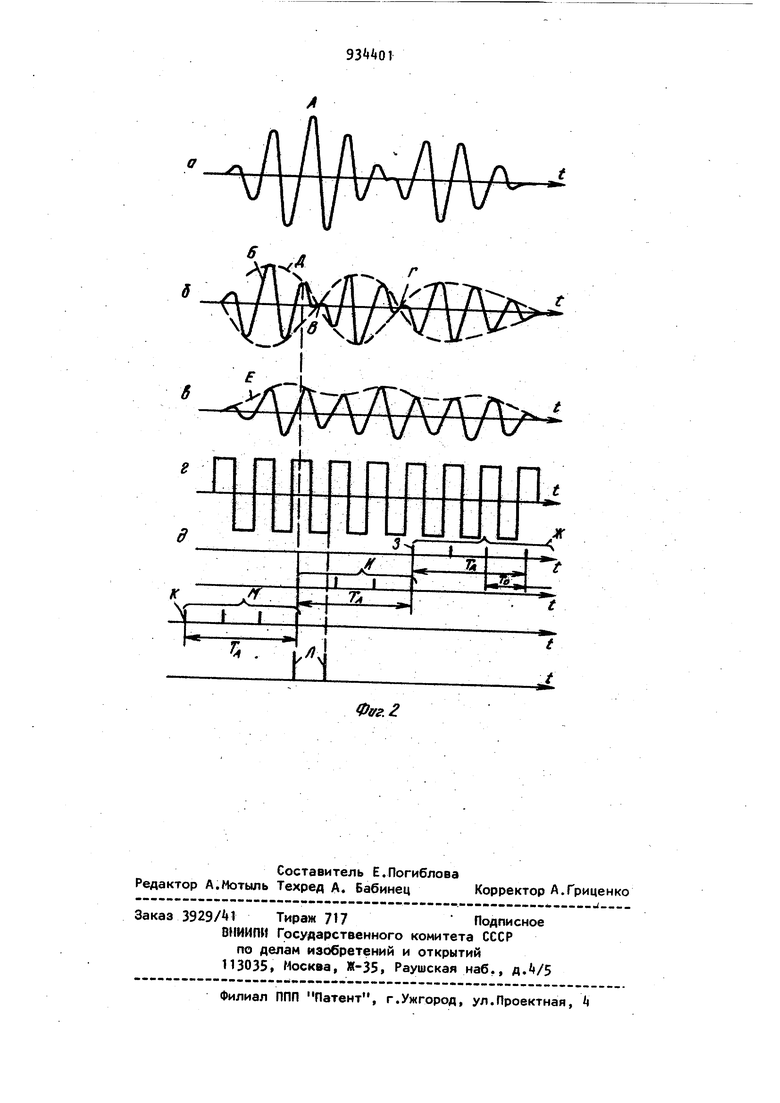
Указанная цель достигается тем, что в устройство для измерения временного положения импульса введены последовательно соединенные интегрирующий фильтр, дополнительный коммутатор, усилитель-ограничитель, блок совпадений, блок накопителей и пороговый блок, при этом выход режекторного фильтра соединен с входом интегрирующего фильтра и вторым входом дополнительного коммутатора, третий выход регистратора соединен с вторыми входами блока совпадений, блока накопителей и порогового блока, выход которого соединен с вторым входом регистратора, четвертый выход котрро39го соединен с управляющим входом дополнительного коммутатора. На фиг.1 представлена структурная электрическая схема предложенного устройства; на фиг.2 - временные диаграммы, пояснящие его работу. Устройство содержит полосовый фильтр 1, режекторный фильтр 2, блок 3 формирования отсчетной точки, регистратор +, анализатор 5 знака рассогласования параметров сигнала, накопитель 6, коммутатор 7, интегрируоЦий фильтр 8, дополнительный коммутатор 9, усилитель-ограничитель 10, блок 11 совпадений, блок 12 накопителей и пороговый блок 13. i cтpoйcтвo работает следующим образом. На вход устройства поступает аддитивная смесь полезного поверхностного сигнала и синусоидальной помехи. На выходе режекторного фильтра 2 образуется сигнал А {фиг.2а). Синусоидальная помеха подавляется режекторным фильтром 2. Далее сигнал А поступает в блок 3 формирования отсчетной точки, вследствие чего образованный сигнал Б (фиг.26) на его выходе имеет несколько переходов В, Г огибающей Д через нулевой уровень. В результате, при обработке такой смеси в регистраторе возможны ошибки при определении временного положения импульса. Кроме того, смес сигналов поступает на интегрирующий фильтр 8, устраняющий переходы огибающей Е через нулевой уровень (фиг.2в), а далее через коммутатор 9 на усилитель-ограничитель 10, нормирующий ( фиг. 2г) амплитуду приходящих импульсов независимо от удаления от станций, а далее на блок U совпадений, куда одновременно в соответствии с временной диаграммой принимаемых от каждой станции сигналов поступает серия строб-импульсов Ж (фиг.2д) от регистратора j, временной интервал между которыми равен периоду TO высокочастотного заполнения радиоимпульса. Полученные выборки поступают в блок 12 накопителей, на который также поступают строб-импульсы Ж из регистратора в соответствии с временной диаграммой сигналов от каждой станции. Опрос накопителей начинается с первого, которому соответствует строб-импульс Зо Если первый накопи4тель обнаружил сигнал, то в регистратор 4 через пороговый блок 13 пойдет импульс установки, а регистратор в следующем цикле анализа уже будет вырабатывать строб-импульсы И, сдвинутые к началу сигнала на интервал анализа Тд. Циклы анализа повторяются до тех пор, пока в первом накопителе по строб-импульсу К не будет отсутствовать накопление. Это значит, что обнаружено начало сигнала Е, которое вследствие задержки в интегрирующем фильтре 8 не совпадает с началом сигнала Б, которое необходимо обнаружит ь После этого из регистратора k на коммутатор 9 поступает команда, по Которой на усилитель-ограничитель 10 поступает сигнал А непосредственно с выхода режекторного фильтра 2. Цикл опроса и анализа повторяется снова, но уже с тем сигналом А, который поступает и на блок,3 формирования отсчетной точки. Однако захвата ложного нуля не может произойти, так как следящие стробы Л {фиг.2д), жестко связанные с строб-импульсами М, выведены в район переднего фронта радиоимпульса, т.е. в район истинной характерной точки В сигнала Б. Далее, по команде с регистратора на коммутатор 7 начинает работать кольцо коррекции, корректируя форму сигнала в истинной характерной точке В. Таким образом, введение дополнительных блоков позволяет повысить точность измерения путем устранения лонного захвата нуля характерной точки. Формула изобретения Устройство для измерения временного положения импульса по авт.св. № 576553, отличающееся тем, что, с целью повышения точности измерения в условиях одновременного воздействия сигнала и синусоидальных помех, введены последовательно соединенные интегрирующий фильтр, дополнительный коммутатор, усилитель-ограничитель, блок совпадений, блок накопителей и пороговый блок, при этом выход режекторного фильтра соединен с
входом интегрирую1чего фильтра и вторЫм входом дополнительного коммутатора, третий выход регистратора соединен с вторыми входами блока совпадений, блока накопителей и порогового блока, выход которого соединен с вторым входом регистратора, четвертый выход которого соединен с управляющим входом дополнительного коммутатора.
Источники информации, принятые во внимание при экспертизе
Фиг. /
Фиг. г
