1
Изобретение относится к системам точного измерения малых периодов времени и может использоваться в области систем точного времени для синхронизации сигналов с помощью радиотехнических средств.
Известно устройство, содержащее погследовательно соединенные полосовой )фильтр,режекторный фильтр,формирователь отсчетиой точки и регистратор,а также по-следовательно соединенные анализатор рассогласования параметров сигнала,накопитель и коммутатор,причем вход анализатора рассогласования параметров сигнала соединен с выходом формирователя отсчет- ,5 ной точки, иыход коммутатора соединен с управляющим входом формирователя отсчетной точки, а управляющие входы ана- лизатора и коммутатора соединены с соответствующими выходами регистратора 1J20
Недостатком устройства является смещение временного положения отсчетиой точки сигнала, приводящее к ощибке измерения.
Известно устройство, в котором поло совой фильтр охвачен кольцом фазовой автоподстройки по пилот-сигналу, -что стабилизирует его параметры и уменьшает с,1ещение временного положения счетной точки сигнала. Устройство содержит ко 1мутатор, формирователь Ш1лот«сигнала, формирователь иьтпулъсов, усилитель-ограничитель, фазовый детектор, интегратор, формирователь отсчетной точки, регистратор, анализатор, накопитель, полосовой фильтр и режекторный фш1ьтрГ21.
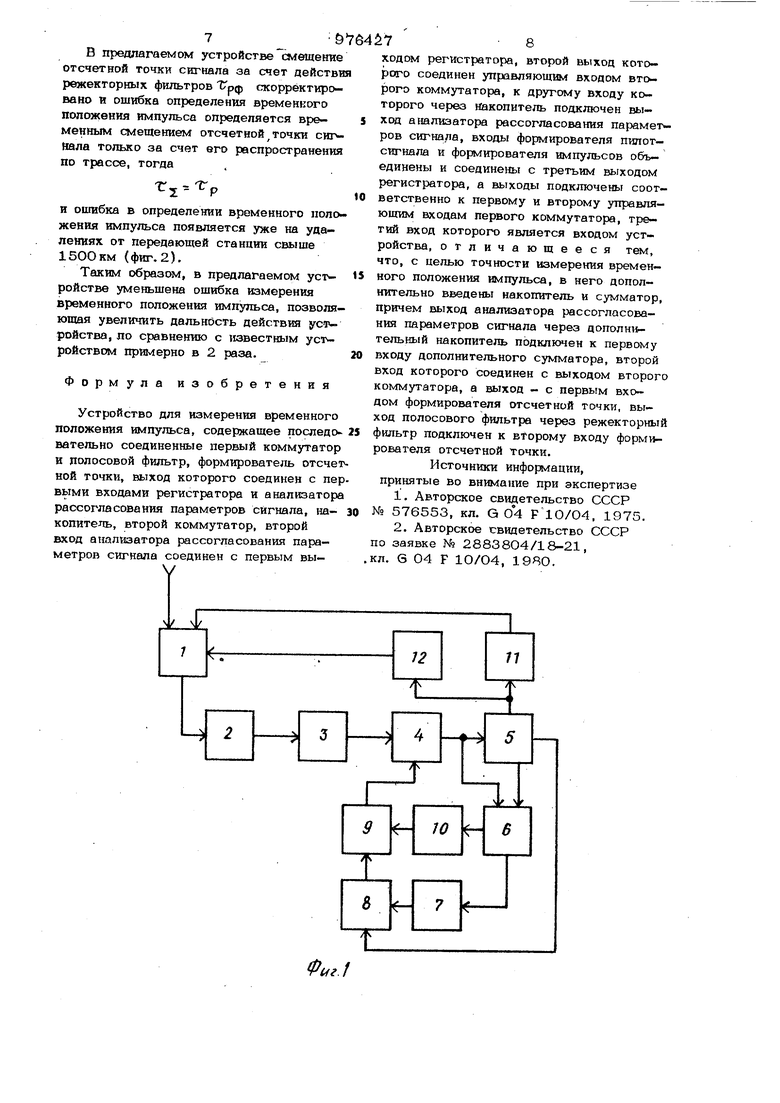
Недостатком известного устройства является то, что стабилизация ампшгтудно.частотной характеристики (АЧХ) полосового фишзтра возможна только при условии оди(шкового ухода электрических параметров элементов фильтра от номинала, что маловероятно, так как температурные коэффициенты ухода эпектругческих параметров элементов фильтра (индуктивности, резисторы)имеют равновероятное как попо.жительное.так и отрицательное значе те; фазовым кольцом автоподстройки фазы не- сушей радиоимпульса не обеспечивается пол ной стабилизации АЧХ и,как следствие этого,временное положение отсчетной точки сигнала смещено,. Другим недостатком устройства является то, что пилот-сигналом не охватывается режекторныЙ1 фильтр, перестройка которого влияет на временное положение отсчетной точки.. Целью изобретения является увеличение точности измерения временного положения И пульсаа и, как следствие этогО| увеличение дальности действия устройства Указанная цель достигается тем, что в устройство для измерения временного положения импульса, содержащее последовательно соединенные первый коммутатор и полосовой фильтр, формирователь отсчетной точки, выход которого соединен с первыми входами регистратора и анализатора рассогласования параметров сигнала, накопитель, второй коммутатор, второй вход анализатора рассогласования параметров сигнала соединен с первым выходом регистра тора, второй выход которс го соединен с управляющим входом второго коммутатора, к другому входу которого через накопитель подключен выхо аналвн затора рассогласования параметров сигнала, входы формирователя пилот-сигнала .и формирователя импульсов объединены и соединены с третьим выходом регистратора, а выходы подключены соответственно к первому .и второму управляюпгам входам первого коммутатора,, tpeтий вход котоtporo является входом устройства, дополнительно введены накопитель и сумматор, причем выход анализатора рассогласования, параметров сигнала через дополнительный накопитель подключен к первому входу дополнительного сумматора, второй вход которого соединен с выходом второго коммутатора, а выход - с первым входом -формирователя отсчетной точки, выход полосового фильтра через режекторный фильтр подключен к второму входу формирователя отсчетной точки. На фиг. 1 представлена функциональная схема устройства для измерения вр&меиного положения импульса; на фиг. 2 Зависимость временного смещения отсчет- ной точки от дальности распространения над сушей. Устройство для измерения временного положения импульса содержит последовательно соединенные ком{Лутатор 1, полосовой фильтр 2, режекторный фильтр 3, формирователь 4 отсчетной точки, регистратор 5, а также последовательно соед Ненные аналюатор 6 рассогласования параметров сигнала, наьопитель 7, коммутатор 8, сумматор 9, причем выход сумматора 9 соединен с управляющим входом формирователя 4 отсчетной точки, вход анализатора 6 рассогласования параметров сигнала и коммутатор 8 соединены с соответствующими выходами регистратора 5, накопитель 10, вход которого соединен с другим выходом анализатора 6 рассогласования параметров сигнала, а выход соединен с вторым входом сумматора 9, формирователь 11 пилот-сигнала и фо{ мирователь 12 галпульсов, входы которых соединены с третьим выходом регистратора 5, а выходы соединены соответственно с первым и BTof&iM управляющим входом 1соммутатора 1. Устройство работает следующим обра- . зом. Сигнал и помеха поступают от антенны через коммутатор 1 на полосовой 2 и режекторный 3 4 льтры, где помеха фшп труется, и далее - на формирователь 4 отсчетной точки и регистратор 5, в котором осуществляется временной поиск (зигнала, синхронизация местной временнйй шкалы с временной диаграммой прихо- з дящих радиоимпульсов и устранение многозначности фазош 1х от сЧетов. Уменьшение смещения временного положения отсчетной точки осуществляется периоцнческим прерыванием обычной работы устройства с помощью коммутатора 1, на управляющий вход которого поступают широкие селекторные импульсы от формирователя 12 импульсов, запускаемого регистратором 5. Эти импульсы переключают коммутатор 1 так, что на вход : полосового фильтра 2 поступает пилотсигнал, представляющий собой либо копию принимаемого сигнала, либо серию коротких импульсов, фор дирующих в полосовом фильтре 2 копию принимаемого сигнала. При отклонении АЧХ полосового фильтра 2 от заданной отсчетная точка пилотсигнала смещается так же, как у принимаемого сигнала. Преобразованный пилотсигнал с выхода формирователя 4 отсчетной точки подается иа вход анализатора 6 рассогласования параметров сигнала, Hia другой вход которого поступают с регисти. ратора 5 стробирующие импульсы, с nt мощью которых оцениваются параметры преобразованного пилот-сигнала (смеш&кие отсчетной точки). Анализатор 6 рассо- гласования параметров сигнала анализирует фактическое смещение отсчетной точки пилот сигнала по общему воздействию
сех режекторных фильтров и расстройки олосового фильтра 2, вырабатывает сиг валы ошибки, которые накапливаются о акопителе 10 и через сумматор 9 поаются на управляющий вход форыирова- s теля 4 отсчетной точки.
Таким образом, если в известном уст ройстве пилот-сигналом, в виде отрезка синусоиды, устранялось только ыпшние изменения АЧХ полосового фильтра на 0 ременное положение отсчетной точки путем стабилизации АЧХ, то в предлагаемом устройстве устраняется влияние не тольКо изменения АЧХ полосового фильтра, но и влияние перестройки режекторного 15 фильтра на временное положение отсчетной точки путем корректировки параметров формирователя отсчетной точки управляющими напряжением, величина которого пропорциональна смещению отсчетной точ- 20 ки шшот-сигнала, представляющего собой копию реального радиоимпульса. Поскольгку соотношение сигиал-шум при работе с пилот-сигналом выбирается значительно
больше единипы и анализируется фактичес;25 кое смещение отсчетной точки, то коррекция ее временного положения производится с высокой степенью точности. ,. Коррекция параметров формирователя 4 отсчетной точки, учитывающая измене- зо ние АЧХ полосового фильтра 2 и перестройку режекторных фильтров 3, производится до режима устранения многозначности фазовых отсчетов принимаемых радиоимпульсов, что облегчает сам процесс устранения многозначности и уменьшает ошибку измерения временного положения импульса.
После устранения многозначности фазовых отсчетов принятых радиоимпульсов, .. также как и в известном устройстве, производится коррекция временного положения отсчетных точек по их смещению, вызванному искажением радиоимпульсов в процессе распросгранения по трассе. Коррекияя производится следующим об- . разом. П|юобразованный радиоимпульс с выхода формирователя 4 отсчетной точки подается на анализатор 6 рассогласования параметров сигнала, на второй выход которого с регистратора 5 поступает стробирующие импульсы, с помощыо которых оцетшаются парамет ял преобразованнгач) радиоимпульса (смещение отсчетной точки). Анализатор 6 рассогласования параметров сигнала вырабатывает сигна- лы ошибки, которые с второго выхода поступают на накопитель 10 и далее через коммутатор 8 подаются на сумментор 9, где они суммируются с сигналам ошибки, вырабатываемыми анализатором б по пилот-сигналу. Суммарный сигнал ошибки с сумматора 9 подается на управляющий вход формирователя 4 отсчетной точки сигнала для коррекции ее временного положения. Коммутатор 8 включается поступлением на его управляющий вход команды от регистратора 5 только после того, как осуществится вре менной поиск сигнала и устранится многозначность фазовых отсчетов. В противном случае будет происходить ложная коррекция в неустановившемся режиме следящих систем регистратора 5.
Таким образом, в предлагаемом устройстве, по сравнению с известным, осущест вляется коррекция временного положения отсчетной точки сигнала не только при изменений АЧХ полосового фильтра, но и при действии режекторных фильтров, что облегчает устранение многозначное ти фазовых отсчетов и уменьшает ошибку временного положения импульса.
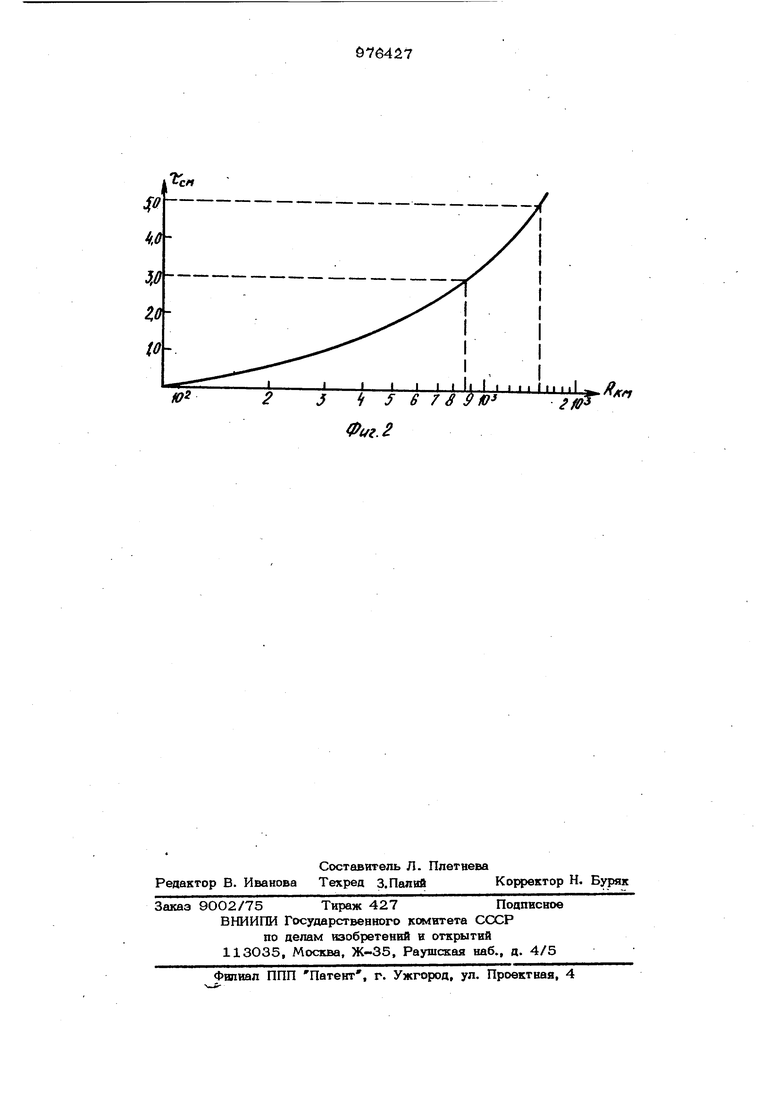
Из графика (фиг. 2) видно, что сме щение отсчетной точки в 5 мкс (условие нарушения однозначности определения фазового отсчета) достигается на удалении от передающей станции в 1500км.
Поскольку суммарное смещение отсчет ной точки сигнала f (обусловленное изменением АЧХ полосового фильтра 2 t , действием режекторных фильтров 3 СГрф и искажением сигнала в процессе его распространения по трассе rtp) не должно превышать 5 мкс, то, уменьшая ) рф уменьшается ошибка измерения временного положения импульса и увеличивается дальнойть действия устройства.
В известном устройстве временное смещение отсчетной точки сигнала обусловлено действием режекторных фильтров (если АЧХ полосового фильтра стабилизирована) и искажением радиоимпульса в процессе распросгранения его по траосе. Принимаем2Грф равной 2,5 мкс, тогда на смещение отсчетной точки сигнала tp остается менее 2,5 мкс, так как
()5По графику (фиг. 2) дальность действв устройства равна 75О км. При работе устройства на больших удалениях от Пер дающей станции общее смещение отсчетно точкк становится более 5 мкс в вознвкаег ошибка в определении временного поло жевия импульса. В предлагаемом устройстве смешение отсчетной точки сигнала за счет действи режекторных фильтров скорректировано и ошибка определения временного положения импульса определяется временным смещением отсчет ной точки сиг Кала только за счет его распространения по трассе, тогда T-j-.Tp и ошибка в определении временного положения импульса появляется уже на удалениях от передающей станции свыше 1500км (фиг. 2). Таким образом, в предлагаемом устройстве уменьшена ошибка измерения временного положения импульса, позволяющая увеличить дальность действия yci ройства, ло сравнению с известным устройством примерно в 2 раза. Формула изобретения Устройство для измерения временного положения импульса, содержащее последовательно соединенные первый коммутатор и полосовой фильтр, формирователь отсчет ной точки, выход которого соединен с пер выми входами регистратора и анализатора рассогласования параметров сигнала, накопитель, второй коммутатор, второй вход анализатора рассогласования параметров сигнала соединен с первым выVХОДОМ регистратора, второй выход которого соединен управляющим входом второго коммутатора, к другому входу которого через накопитель подключен выход анализатора рассогласования парамет ров сигнала, входы формирователя пилотсигнала и формирователя импульсов объединены и соединены с третьим выходом регистратора, а выходы подключеньг соответственно к первому и второму управляющим входам первого коммутатора, третий вход которого является входом устройства, отличающееся тем, что, с целью точности измерения временного положения импульса, в него дополнительно введены накопитель и сумматор, причем выход анализатора рассогласования параметров сигнала через дополнительный накопитель подключен к первому входу дополнительного суктматора, второй вход которого соединен с выходом второго коммутатора, а выход - с первым входом формирователя отсчетной точки, выход полосового фильтра через режекторный фильтр подключен к второму входу формирователя отсчетной точки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 576553, кл. Q О4 F 10/04, 1975. 2.Авторское свидетельство СССР по заявке № 2883804/18-21, л. 6 04 F 10/О4, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| Устройство для измерения временного положения импульса | 1976 |
|
SU576553A1 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU951214A2 |
| Устройство для устранения многозначности при фазовых измерениях | 1977 |
|
SU656002A1 |
| Способ измерения временного положения переодической последовательности радиоимпульсов и устройство для его осуществления | 1977 |
|
SU673944A1 |
.1
