Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, в составе которых присутствуют механизмы с зазорами между элементами механических передач, требующие компенсации.
Такие системы характерны для станков в металлообработке и роботов. Появление зазоров в них значительно снижает точность перемещения механизмов, ухудшает качество выпускаемой продукции, снижает эффективность производства.
Известно «Устройство управления движением режущего инструмента при обработке деталей на станке» (патент на изобретение RU №2432233, МПК В23В 25/06, 2011 г.). Объектом управления устройства является исполнительный двигатель с нагрузкой на валу, в том числе с упругими связями и зазором, к которым предъявляются повышенные требования к точности, быстродействию и стабильности динамических характеристик. Устройство содержит последовательно соединенные устройство ЧПУ, сумматор, регулятор, усилитель мощности, соединенный с исполнительным двигателем станка, выход которого соединен с входом сумматора, отличающееся тем, что оно снабжено определителем отклонения расчетной траектории движения режущего инструмента от заданной, вход которого соединен с выходом устройства ЧПУ, а выход через усилитель - с входом сумматора.
Устройство выполняет свои основные функции, но обладает недостатком, присущим всем системам с определителем отклонения расчетной траектории движения режущего инструмента от заданной - низкой параметрической робастностью. Для достижения поставленной авторами цели в изобретении используется математическая модель автоматического устройства управления обработкой деталей, представляющая полный аналог реальной системы. Даже незначительная вариация параметров объекта управления, входящих в математическую модель, являющуюся основой определителя отклонения расчетной траектории движения режущего инструмента от заданной, приводит к резкому снижению качественных показателей системы управления, поскольку система не замкнута по основному параметру.
Известно устройство для управления двухдвигательным электроприводом (авторское свидетельство СССР №1577054, МПК Н02Р 5/46, Н02Р 7/68, 1990 г.), содержащее общий регулятор скорости, выход которого подключен к первым входам регуляторов тока, предназначенных для подключения к якорным обмоткам двигателей, датчики тока, подключенные соответственно к вторым входам регуляторов тока, блок формирования распора, сумматор, пороговый элемент, включающий блок выделения модуля, и ключевой элемент, при этом первый и второй входы сумматора соединены с выходами датчиков тока, выход сумматора подключен к входу порогового элемента, выход которого соединен с управляющим входом ключевого элемента, а первый и второй выходы блока формирования распора через ключевой элемент подключены к соответствующим третьим входам регуляторов тока, причем блок формирования распора выполнен в виде двух регулируемых разнополярных источников напряжения.
Работа устройства основана на управлении движением общей массы (рабочий орган) по принципу электромеханического распора. Его применение возможно только для многодвигательного привода, так как электромеханический распор осуществим при работе с разными моментами нескольких приводных двигателей, работающих на один зубчатый венец или зубчатую рейку. То есть, один из двигателей работает в двигательном, а другой - в тормозном режимах. В момент изменения направления движения общего рабочего органа, функции двигателей меняются, благодаря чему движение происходит без перехода через люфт. Постоянный электромеханический распор исключает возникновение люфта, но работа одного из двигателей в тормозном режиме вызывает дополнительные потери электроэнергии и увеличивает нагрузки, приводящие к большему износу. Поэтому система управления должна обеспечивать распор только тогда, когда повышается вероятность перехода через зазор, а именно -при режимах пуска, реверса и торможения. Формирование распора происходит при условии, если момент нагрузки на валу ведущего двигателя меньше суммарного момента трения, приведенного к нему. Если же это значение момента нагрузки превысит значение момента трения, то второй тормозной двигатель пройдет через зазор и примет на себя часть нагрузки.
Недостатками указанного технического решения являются:
Во-первых, высокая стоимость и сложность, что связано с использованием двух электродвигателей, параметры которых могут различаться. Хотя они могут иметь одинаковые технические характеристики, но при их производстве может иметь место, так называемый, технологический разброс параметров. Из-за этого возможно возникновение неравномерного распределения нагрузки между двумя двигателями.
Во-вторых, при выходе значений скорости и нагрузочного момента общей массы за пределы установленного диапазона, происходит раскрытие зазоров передач, возникают колебательные процессы в электрической и механической частях электропривода, что приводит к повышенному износу, снижению надежности системы и ухудшению качества управления движением рабочего органа.
В-третьих, при наличии упругих звеньев в кинематических передачах ухудшение показателей качества и надежности становится более значительным.
Известно устройство следящего привода (источник книга С.Г. Воронин. Электропривод летательных аппаратов: Учебно-методический комплекс. Offline версия 1.0 - Челябинск, 1995-2011, Глава 9. Следящие электроприводы, функциональная схема следящего электропривода, рис. 9.1), принятое за прототип, содержащее первый элемент сравнения, первый неинвертирующий вход которого соединен с источником задающего напряжения, а выход через регулятор положения соединен с первым неинвертирующим входом второго элемента сравнения, выход которого через регулятор скорости подключен к первому неинвертирующему входу третьего элемента сравнения, выход третьего элемента сравнения через регулятор тока соединен с входом силового преобразователя, выход которого подключен к электродвигателю постоянного тока снабженному датчиком тока соединенным со вторым инвертирующим входом третьего элемента сравнения, датчик скорости, размещенный на валу электродвигателя постоянного тока, соединенный со вторым инвертирующим входом второго элемента сравнения, датчик положения размещенный на выходном валу рабочего органа (объекта регулирования) соединенный со вторым инвертирующим входом первого элемента сравнения.
Указанное устройство работает как традиционная трехконтурная система управления на основе электродвигателя постоянного тока, замкнутая по следующим координатам: ток электродвигателя постоянного тока (через датчик тока), скорость электродвигателя постоянного тока (через датчик скорости) и положение вала рабочего органа (через датчик положения). Результатом функционирования прототипа является обеспечение монотонности переходного процесса, т.е. отсутствие перерегулирования. Такая задача ставится, например, перед приводами промышленных манипуляторов. Во многих случаях выдвигаются жесткие требования к точности поддержания рабочего органа в заданном положении при наличии внешних возмущений.
Как известно, в моменты раскрытия зазора электродвигатель теряет контакт с рабочим органом и, как следствие, возможность управления им. Контуры управления положением рабочего органа следящих систем автоуправления при этом размыкаются, а входящие в их структуру интегрирующие элементы начинают интенсивно накапливать паразитную информацию, безуспешно пытаясь устранить нарастающие ошибки управления. После завершения выборки зазора большие объемы накопленной информации направляются в восстановленные контуры управления, вызывая значительные перерегулирования, колебания и порождая повторные раскрытия зазоров. Особенно неблагоприятными становятся указанные процессы в быстродействующих астатических системах контурно-позиционного и следящего управления электроприводами.
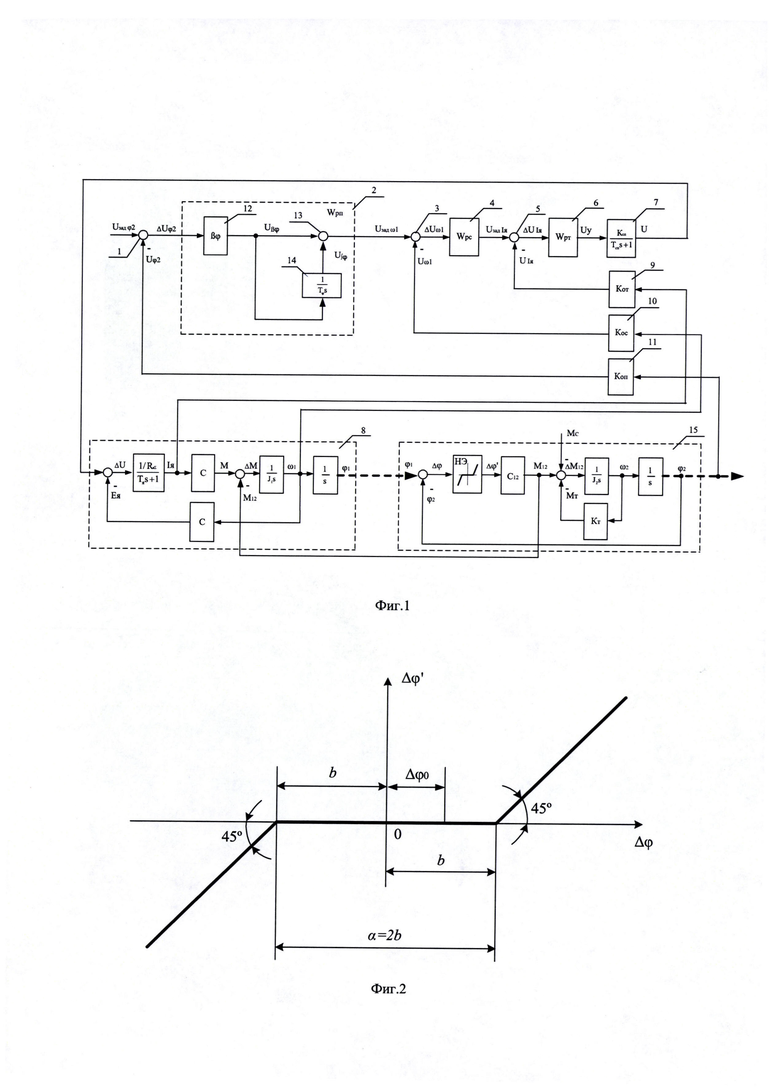
Для оценки влияния зазора на работу прототипа проведем его исследования, воспользовавшись возможностями компьютерного моделирования. Для этого составим подробную структурную схему прототипа, при этом некоторые элементы представим в виде узлов и блоков, общепринятую структуру которых можно взять из доступной технической литературы по данной тематике, например, воспользовавшись описанием системы для автоматического регулирования положения по отклонению (источник книга Ключев В.И. Теория электропривода: Учеб. для вузов. - 2-е изд. перераб. и доп. - М.: Энергоатомиздат, 2001. - 704 с. (стр. 629, рис. 9.4)). Для анализа работы устройства представим рабочий орган структурой, известной из книги Ключев В.И. Теория электропривода: Учеб. для вузов. - 2-е изд. перераб. и доп. - М.: Энергоатомиздат, 2001. - 704 с. (стр. 87, рис. 1.28)). В конструкции рабочего органа учтены механический зазор, упругость, инерционность и трение. Полученная структурная схема прототипа приведена на фиг. 1.
Структурная схема прототипа содержит первый элемент сравнения 1, к неинвертирующему входу которого подключено задающее напряжение Uзад.ϕ2, выход первого элемента сравнения 1 через регулятор положения 2 соединен с неинвертирующим входом второго элемента сравнения 3. Выход второго элемента сравнения 3 через регулятор скорости 4 подключен к неинвертирующему входу третьего элемента сравнения 5, а выход третьего элемента сравнения 5 через регулятор тока 6 соединен со входом силового преобразователя 7, подающего питающее напряжение на электродвигатель постоянного тока 8. Датчик тока 9 соединен с первым инвертирующим входом третьего элемента сравнения 5, датчик скорости 10 подключен к инвертирующему входу второго элемента сравнения 3, датчик положения 11 соединен с инвертирующим входом первого элемента сравнения 1. Для организации подобной структуры методами подчиненного регулирования можно синтезировать передаточные функции регуляторов положения 2, скорости 4 и тока 6. Так, для регулятора положения 2 структура, изображенная на фиг. 1, представляет собой ПИ-регулятор и содержит пропорциональное звено 12, выход которого подключен к первому неинвертирующему входу четвертого элемента сравнения 13, а через интегрирующее звено 14 - ко второму неинвертирующему входу четвертого элемента сравнения 13. Вал электродвигателя постоянного тока 8 механически жестко соединен с входным валом рабочего органа 15, датчик положения 11 размещенный на выходном валу рабочего органа соединен с вторым инвертирующим входом первого элемента сравнения 1. В электромеханической системе вал электродвигателя постоянного тока 8 механически соединен с входным валом рабочего органа 15 с обратной связью по моменту М12. В схеме рабочего органа 15 учтены механический зазор (в виде нелинейного элемента), упругость (в виде пропорционального звена С12), момент статического сопротивления Мс на валу рабочего органа, инерционность (в виде момента инерции J2), трение (в виде пропорционального звена Кт).
На структурной схеме прототипа, приведенной на фиг. 1, так же использованы обозначения:
Uзад.ϕ2 - напряжение, определяющее заданное значение положения выходного вала рабочего органа 15;
Uϕ2 - напряжение на выходе датчика положения 11;
ΔUϕ2 - напряжение ошибки по положению вала рабочего органа 15;
Uβq - напряжение пропорциональной составляющей регулятора положения 2;
 - напряжение интегральной составляющей регулятора положения 2;
- напряжение интегральной составляющей регулятора положения 2;
Uзад.ϕ1 - напряжение, определяющее заданное значение скорости вращения вала электродвигателя постоянного тока 8;
Uω1 - напряжение на выходе датчика скорости 10;
ΔUω1 - напряжение ошибки по скорости вращения вала электродвигателя постоянного тока 8;
Uзад Iя - напряжение, определяющее заданное значение тока якоря электродвигателя постоянного тока 8;
UIя - напряжение на выходе датчика тока 9;
ΔUIя - напряжение ошибки по току электродвигателя постоянного тока 8;
Uy, U - управляющее и выходное напряжение силового преобразователя 7;
Ея - напряжение противоЭДС якорной цепи электродвигателя постоянного тока 8;
ΔU - напряжение на якорной цепи электродвигателя постоянного тока 8;
Iя - ток якоря электродвигателя постоянного тока 8;
М - момент электродвигателя постоянного тока 8;
М12 - момент статического сопротивления на валу электродвигателя постоянного тока 8 от воздействия на его вал рабочего органа 15;
ΔM - разность моментов на валу электродвигателя постоянного тока 8;
ω1 - скорость вращения вала электродвигателя постоянного тока 8;
ϕ1 - угол поворота вала электродвигателя постоянного тока 8;
ϕ2 - угол поворота выходного вала рабочего органа 15;
Δϕ - разность углов поворота вала электродвигателя ϕ1 и выходного вала ϕ2;
 - нелинейная разность углов поворота вала электродвигателя ϕ1 и выходного вала ϕ2;
- нелинейная разность углов поворота вала электродвигателя ϕ1 и выходного вала ϕ2;
Мт - момент трения в механизмах рабочего органа 15;
ΔМ12 - разность моментов на валу рабочего органа 15;
ω2 - скорость вращения вала рабочего органа 15.
Мс - момент статического сопротивления на валу рабочего органа 15.
Элементы структурной схемы фиг. 1 характеризуются следующими параметрами:
Wрп - передаточная функция регулятора положения 2;
Wpc - передаточная функция регулятора скорости 4;
Wpт - передаточная функция регулятора тока 6;
βϕ - коэффициент усиления пропорционального звена 12 регулятора положения 2;
Тϕ - постоянная времени интегрирующего звена 14 регулятора положения 2;
Ксп - коэффициент усиления силового преобразователя 7;
Тсп- постоянная времени силового преобразователя 7;
RяΣ- суммарное активное сопротивление якорной цепи электродвигателя постоянного тока 8;
Тя - электромагнитная постоянная времени электродвигателя постоянного тока 8;
С - конструктивная постоянная электродвигателя постоянного тока 8;
J1 - момент инерции ротора электродвигателя постоянного тока 8;
Кот - коэффициент усиления датчика тока 9;
Кос - коэффициент усиления датчика скорости 10;
Коп - коэффициент усиления датчика положения 11;
НЭ - нелинейный элемент типа «зона нечувствительности», характеризующий влияние зазора на работоспособность рабочего органа 15;
С12 - коэффициент упругости рабочего органа 15;
J2 - момент инерции механизма рабочего органа 15;
Кт - коэффициент трения механизма рабочего органа 15;
S - оператор Лапласа.
Работу прототипа будем оценивать с точки зрения его влияния на точность слежения угла поворота выходного вала ϕ2 рабочего органа 15 за изменением задающего напряжения Uзад.ϕ2.
Оценим динамические свойства устройства - прототипа, проведя исследования переходных характеристик в режимах отработки изменения задающего напряжения Uзад.ϕ2. Особое внимание уделим оценке влияния зазора на регулируемый параметр - угол поворота выходного вала ϕ2 рабочего органа 15.
Для конкретности приняты следующие значения параметров объекта: Ксп=15.7; Тсп=0.001 с; RяΣ=2.08 Ом; Тя=0.016 с; С=1 Вб; J1=0.04 кг⋅м2; Кот=1 В/А; Кос=1 Вс/рад; Коп=1 В/рад; С12=10000 Нм/рад; J2=0.06 кг⋅м2; Кт=0.4 кг⋅м2/с; Мс=0,5 Нм.
Передаточные функции регуляторов положения, скорости и тока синтезированы методами подчиненного регулирования и учтены в процессе исследования следующими выражениями:
В качестве нелинейного элемента, моделирующего зазор в механизмах рабочего органа 15 будем использовать однозначную статическую симметричную нелинейность вида «зона нечувствительности» с размерами [α, +α] по угловым перемещениям, характеристика «вход-выход» которого представлена на фиг. 2. На этой фигуре входным сигналом нелинейного элемента принят сигнал о разности углов поворота валов электродвигателя и выходного вала рабочего органа Δϕ=(ϕ1-ϕ2 (ошибка по углу поворота выходного вала рабочего органа). Выходным сигналом нелинейного элемента является нелинейная разность углов поворота вала электродвигателя и выходного вала рабочего органа Δϕ'. Угол наклона характеристики «вход-выход» нелинейного элемента равен 45°, что соответствует его коэффициенту усиления на линейных участках характеристики равному единице. Кроме этого на фиг. 2 указаны следующие значения:
α - угловой зазор между положением валов электродвигателя постоянного тока 8 и выходного вала рабочего органа 15;
β - величина, равная половине углового зазора между положением валов электродвигателя постоянного тока 8 и выходного вала рабочего органа 15;
Δϕ0 - величина смещения входного сигнала.
Нелинейный элемент позволяет учесть наличие в механизме рабочего органа 15 углового зазора между положением вала электродвигателя постоянного тока 8 и выходного вала рабочего органа 15, характерного для таких широко распространенных объектов, как металлообрабатывающие станки, роботы-манипуляторы и других. Характеристика показывает, что в диапазоне изменения разности углов поворота Δϕ от -b до +b поворота вала рабочего органа 15 не происходит. И только после превышения текущим значением Δϕ указанных пределов начинается вращение выходного вала рабочего органа 15, причем в этом случае нелинейная разность углов поворота Δϕ' равна величине Δϕ.
Для оценки влияния нелинейного элемента, моделирующего зазор в механизмах рабочего органа 15, на характер переходных процессов использована следующая математическая формула:

где q - коэффициент гармонической линеаризации;
k=tg(45°)=1 - тангенс угла наклона линейной части характеристики нелинейного элемента;
b=0.2 рад - величина, равная половине углового зазора между положением валов электродвигателя постоянного тока 8 и выходного вала рабочего органа 15;
Δϕ=b+Δϕ0+Δ - амплитуда входного сигнала;
Δϕ0=Mc/C12 - величина смещения входного сигнала;
 - входной сигнал.
- входной сигнал.
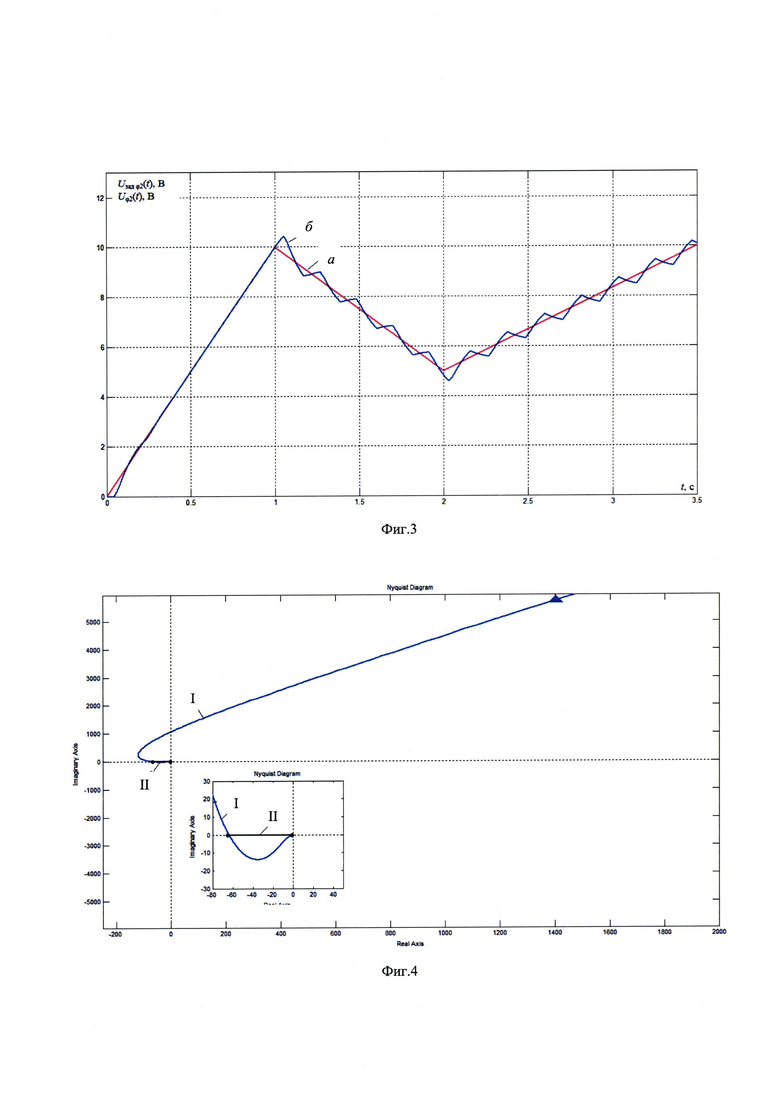
Результаты компьютерного моделирования устройства-прототипа при α=0,2 рад в виде переходных характеристик задающего сигнала Uзад.ϕ2 (t) приведены на графике а (фиг. 3) и напряжения на выходе датчика положения 11 Uϕ2 (t) выходного вала рабочего органа 15 (пропорционального величине угла поворота выходного вала ϕ2 рабочего органа 15) приведены на графике б (фиг. 3). Здесь входной задающий сигнал линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), затем так же линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 10 вольт линейно на временном интервале от 2 с до 3,5 с. Анализ графика 6 (фиг. 3) указывает на наличие периодических колебаний регулируемой координаты - угла поворота выходного вала ϕ2 (t) рабочего органа 15, обусловленных периодическим раскрытием зазора, что приводит к появлению существенной динамической ошибки в процессе регулирования. Это подтверждается пересечением на амплитудно-фазовой плоскости амплитудно-фазовой частотной характеристики линейной части системы автоматического управления и обратной амплитудно-фазовой характеристики нелинейного элемента, что показано на фиг. 4. На фиг. 4 цифрой I обозначена амплитудно-фазовая частотная характеристика линейной части устройства, а цифрой II - обратная амплитудно-фазовая характеристика нелинейного элемента, которая представлена зависимостью  Данная характеристика представляет собой прямую линию с началом в точке (-1, 0j) и окончанием в точке
Данная характеристика представляет собой прямую линию с началом в точке (-1, 0j) и окончанием в точке 
Как видим, эти характеристики пересекаются, что объясняет возникновение автоколебаний. Возникновение колебаний приводит к появлению динамической ошибки и как следствие - к ухудшению точности слежения углом поворота выходного вала рабочего органа 15 за задающим воздействием, а значит и к снижению потребительских свойств продукта, в производстве которого применяется система автоматического управления.
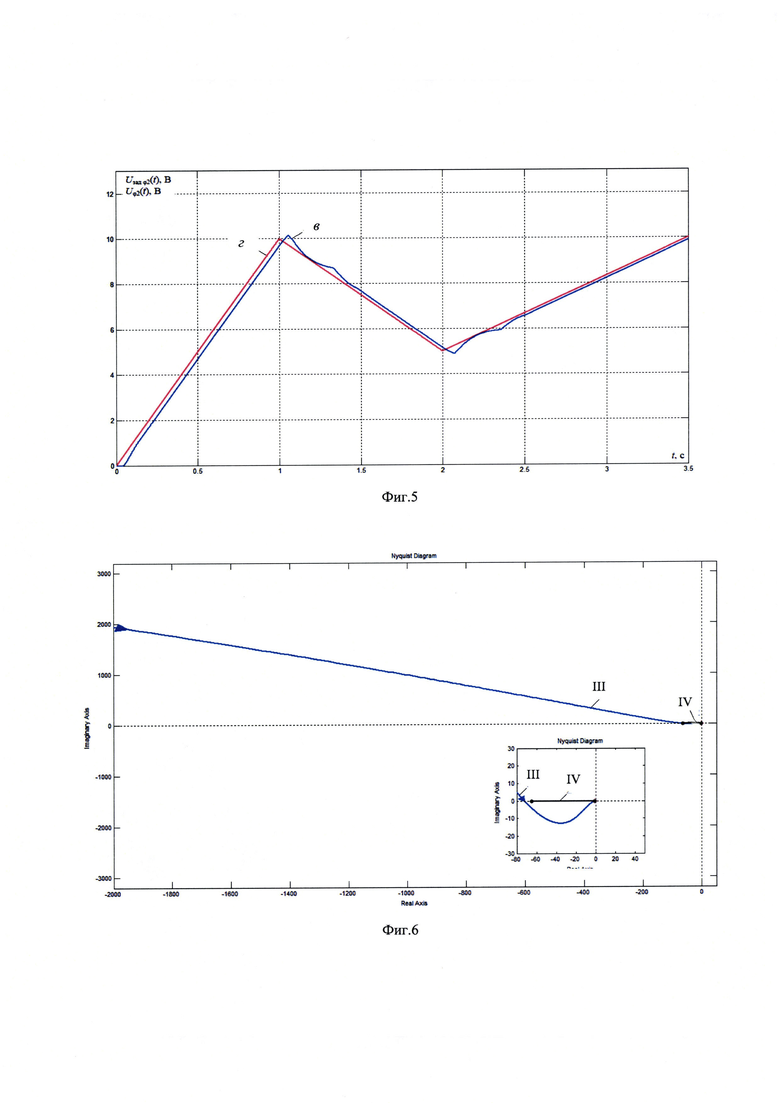
Попытаться минимизировать последствия колебаний угла поворота выходного вала ϕ2 рабочего органа 15 можно, заменив на структурной схеме (фиг. 1) ПИ-регулятор положения 2, выполненный в виде ПИ-регулятора, на П-регулятор, исключив из схемы регулятора положения 2 интегрирующее звено 14.
Результаты компьютерного моделирования влияния данной замены на работоспособность устройства в виде переходных характеристик Uзад.ϕ2 (t) приведены на графике в (фиг. 5) и напряжения на выходе датчика положения 11 Uϕ2 (t) выходного вала рабочего органа 15 (пропорционального величине угла поворота выходного вала ϕ2) приведены на графике г (фиг. 5). Здесь входной задающий сигнал, как и в предыдущем исследовании, линейно нарастает от нуля до 10 вольт (с нулевого момента времени до первой секунды), так же линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 10 вольт линейно на временном интервале от 2 с до 3,5 с. Величина α=0,2 рад как и в предыдущем случае. Анализ графика г (фиг. 5) указывает на отсутствие существенных колебаний угла поворота выходного вала ϕ2 рабочего органа 15. Это объясняется отсутствием пересечения амплитудно-фазовой частотной характеристики линейной части устройства и обратной амплитудно-фазовой характеристики нелинейного элемента, как указано на фиг. 6, на которой цифрой III обозначена амплитудно-фазовая частотная характеристика линейной части устройства, а цифрой IV обозначена обратная амплитудно-фазовая характеристика нелинейного элемента. Однако на всем протяжении процесса регулирования при отсутствии интегральной составляющей в контуре управления наблюдается наличие значительной статической ошибки, приводящей к существенному снижению точности регулирования, а значит, ухудшает качество выпускаемой продукции, снижает эффективность производства. Итак, прототип не обеспечивает высокой точности поддержания вала рабочего органа в заданном положении.
Технический результат предлагаемого изобретения заключается в повышении точности регулирования положения.
Технический результат достигается тем, что устройство автоматического управления электромеханической системой с зазором в кинематической передаче, содержащее первый элемент сравнения, первый неинвертирующий вход которого соединен с источником задающего напряжения, а выход через регулятор положения соединен с первым неинвертирующим входом второго элемента сравнения, выход которого через регулятор скорости подключен к первому неинвертирующему входу третьего элемента сравнения, выход третьего элемента сравнения через регулятор тока соединен с входом силового преобразователя, выход которого подключен к электродвигателю постоянного тока снабженному датчиком тока соединенным со вторым инвертирующим входом третьего элемента сравнения, датчик скорости, размещенный на валу электродвигателя постоянного тока, соединенный со вторым инвертирующим входом второго элемента сравнения, датчик положения размещенный на выходном валу рабочего органа соединенный с вторым инвертирующим входом первого элемента сравнения, при этом регулятор положения содержит пропорциональное звено и интегратор, подключенные к входам четвертого элемента сравнения, выход которого является выходом регулятора положения, дополнительно содержит датчик угла поворота, размещенный на валу электродвигателя постоянного тока, пятый элемент сравнения, блок оценки состояния зазора, коммутатор, блок формирования нулевого сигнала, блок обратной связи по разности углов и блок корректировки параметров зазора, при этом датчик угла поворота, подключен к первому неинвертирующему входу пятого элемента сравнения, выход датчика положения соединен со вторым инвертирующим входом пятого элемента сравнения и через блок корректировки параметров зазора соединен с управляющим входом блока оценки состояния зазора, выход пятого элемента сравнения подключен к информационному входу блока оценки состояния зазора и через блок обратной связи по разности углов подключен к третьему инвертирующему входу третьего элемента сравнения, выход блока оценки состояния зазора соединен с управляющим входом коммутатора, нормально открытый контакт коммутатора подключен к выходу пропорционального звена, являющемуся вторым выходом регулятора положения, нормально закрытый контакт коммутатора соединен с выходом блока формирования нулевого сигнала, а переключающий контакт коммутатора подключен к входу интегратора, являющемуся вторым входом регулятора положения.
Технический результат достигается тем, что устройство автоматического управления электромеханической системой с зазором в кинематической передаче содержащее первый элемент сравнения, первый неинвертирующий вход которого соединен с источником задающего напряжения, а выход через регулятор положения соединен с первым неинвертирующим входом второго элемента сравнения, выход которого через регулятор скорости подключен к первому неинвертирующему входу третьего элемента сравнения, выход третьего элемента сравнения через регулятор тока соединен с входом силового преобразователя, выход которого подключен к электродвигателю постоянного тока, который соединен через датчик тока со вторым инвертирующим входом третьего элемента сравнения и через датчик скорости со вторым инвертирующим входом второго элемента сравнения, вал электродвигателя постоянного тока механически соединен со входным валом рабочего органа, выходной вал рабочего органа через датчик положения соединен с вторым инвертирующим входом первого элемента сравнения, при этом регулятор положения содержит пропорциональное звено и интегратор, подключенные к входам четвертого элемента сравнения, выход которого является выходом регулятора положения, дополнительно содержит датчик угла поворота, размещенный на валу электродвигателя постоянного тока, пятый элемент сравнения, блок оценки состояния зазора, два коммутатора, блок формирования нулевого сигнала, блок обратной связи по разности углов, блок корректировки параметров зазора, блок дифференцирования, блок определения модуля, фильтр нижних частот, компаратор и источник опорного напряжения, при этом при этом датчик угла поворота, подключен к первому неинвертирующему входу пятого элемента сравнения, выход датчика положения соединен со вторым инвертирующим входом пятого элемента сравнения и через блок корректировки параметров зазора соединен с управляющим входом блока оценки состояния зазора, выход пятого элемента сравнения подключен к информационному входу блока оценки состояния зазора и через блок обратной связи по разности углов подключен к третьему инвертирующему входу третьего элемента сравнения, выход блока оценки состояния зазора соединен с управляющим входом первого коммутатора, нормально открытый контакт первого коммутатора подключен к выходу пропорционального звена, являющегося вторым выходом регулятора положения, и к нормально открытому контакту второго коммутатора, нормально закрытый контакт первого коммутатора соединен с выходом блока формирования нулевого сигнала, переключающий контакт первого коммутатора подключен к нормально закрытому контакту второго коммутатора, переключающий контакт второго коммутатора подключен к входу интегратора, являющегося вторым входом регулятора положения, вход блока дифференцирования соединен с неинвертирующим входом первого элемента сравнения, выход блока дифференцирования через последовательно соединенные блок определения модуля и фильтр нижних частот подключен к первому входу компаратора, второй вход которого соединен с выходом источника опорного напряжения, а выход компаратора подключен к входу второго коммутатора.
Сущность изобретения поясняют графические материалы.
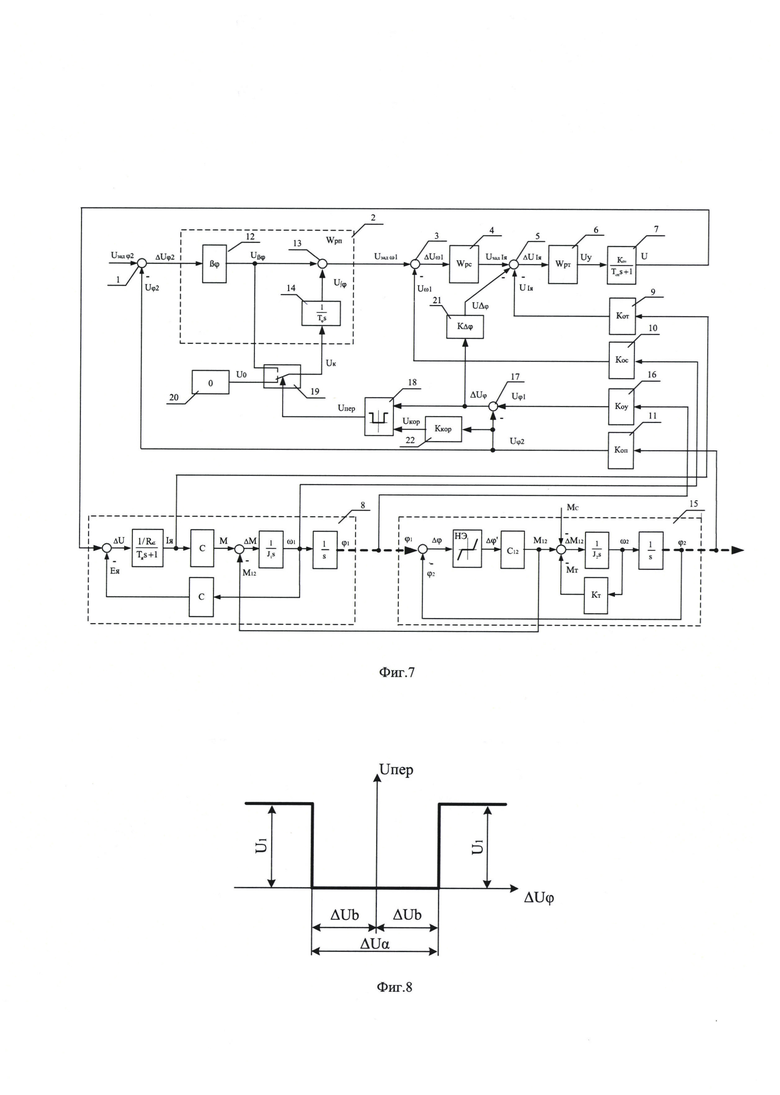
на фиг. 7 изображена структурная схема предлагаемого устройства по первому варианту;
на фиг. 8 приведена переходная характеристика «вход-выход» блока оценки состояния зазора;
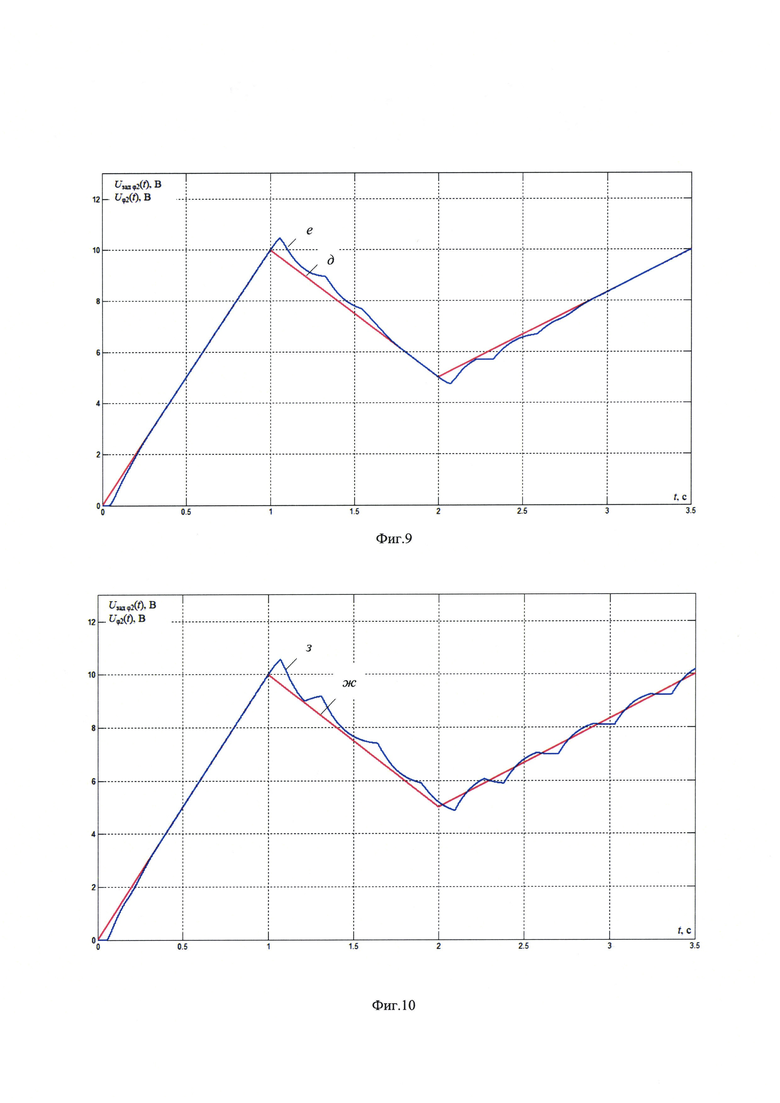
на фиг. 9 приведены результаты компьютерного моделирования работы заявляемого устройства по первому варианту при тех же условиях и тех же режимах, которые выбраны для прототипа.
на фиг. 10 представлены результаты компьютерного моделирования работы устройства по первому варианту при увеличении величины зазора а выше критического при отсутствии обратной связи по разнице углов поворота валов рабочего органа и электродвигателя постоянного тока;
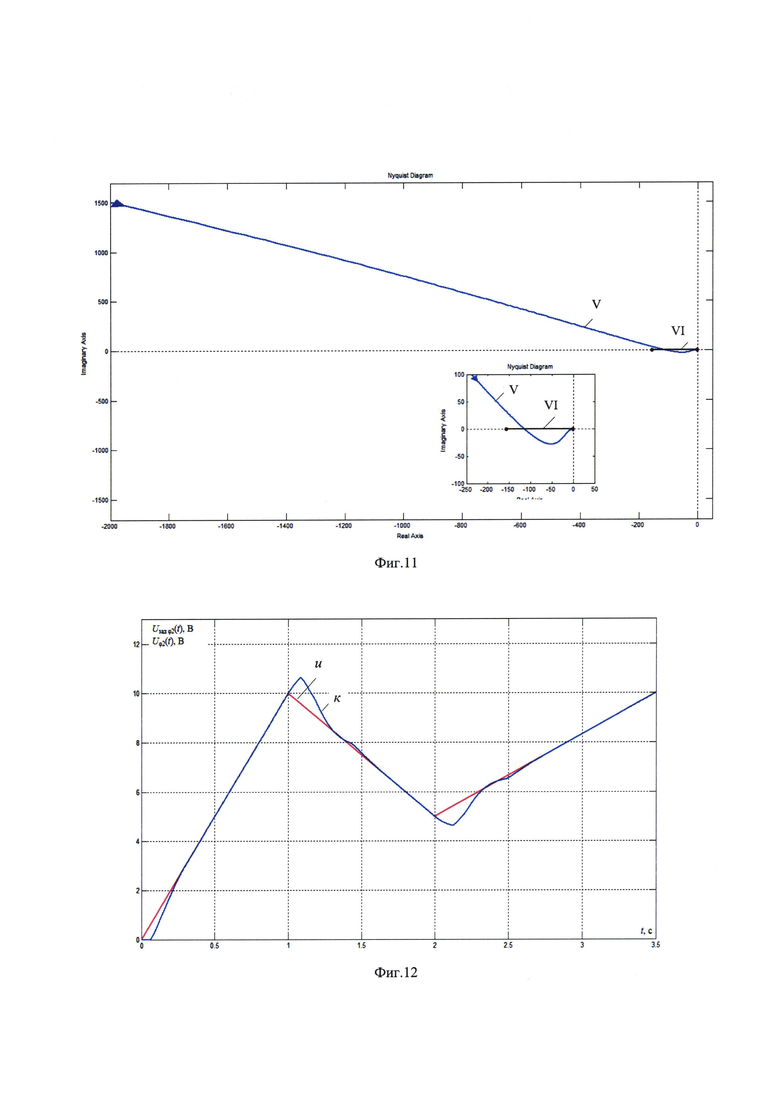
на фиг. 11 приведены амплитудно-фазовые частотные характеристики устройства по первому варианту при увеличении величины зазора а выше критического и отсутствии обратной связи по разнице углов поворота валов рабочего органа и электродвигателя постоянного тока;
на фиг. 12 представлены результаты компьютерного моделирования работы устройства по первому варианту при увеличении величины зазора а выше критического при наличии обратной связи по разнице углов поворота валов рабочего органа и электродвигателя постоянного тока;
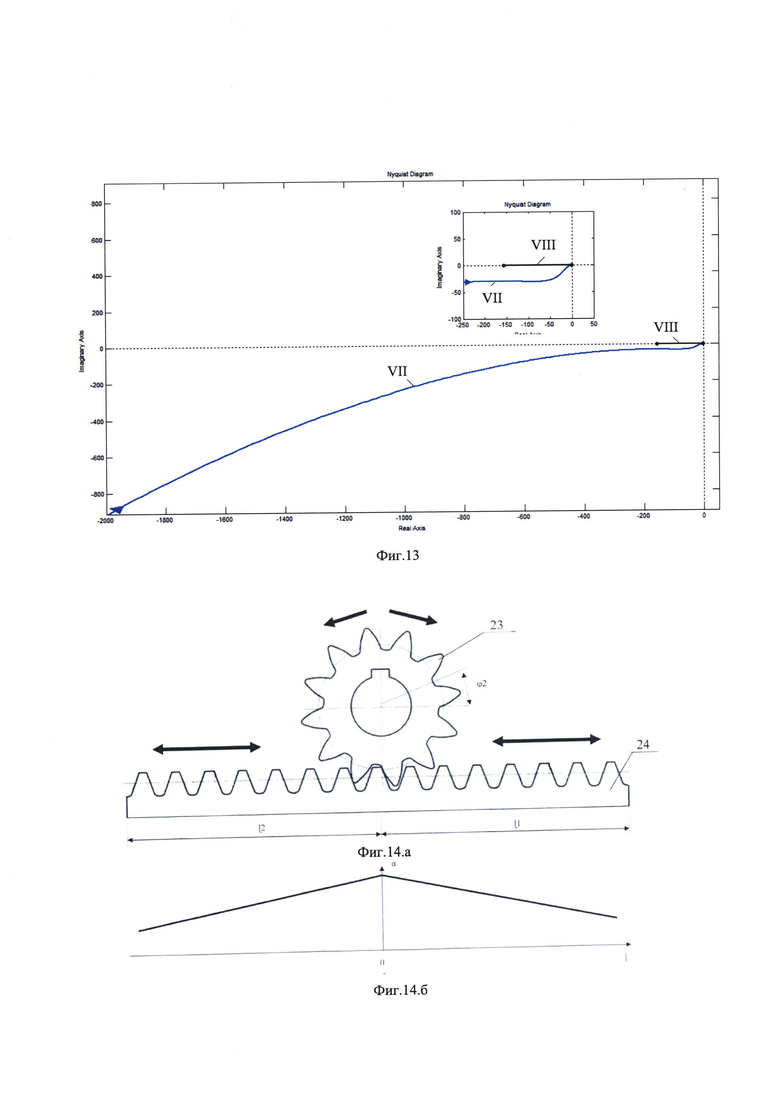
на фиг. 13 приведены амплитудно-фазовые частотные характеристики устройства по первому варианту при увеличении величины зазора α выше критического при наличии обратной связи по разнице углов поворота валов рабочего органа и электродвигателя постоянного тока;
на фиг. 14.а приведено изображение расположения ведущего зубчатого колеса и зубчатой линейки, иллюстрирующее неравномерность распределения зазора по длине;
на фиг. 14.б приведено изображение расположения ведущего зубчатого колеса и зубчатой линейки, иллюстрирующее неравномерность распределения зазора по длине в случае механической выработки элементов передачи;
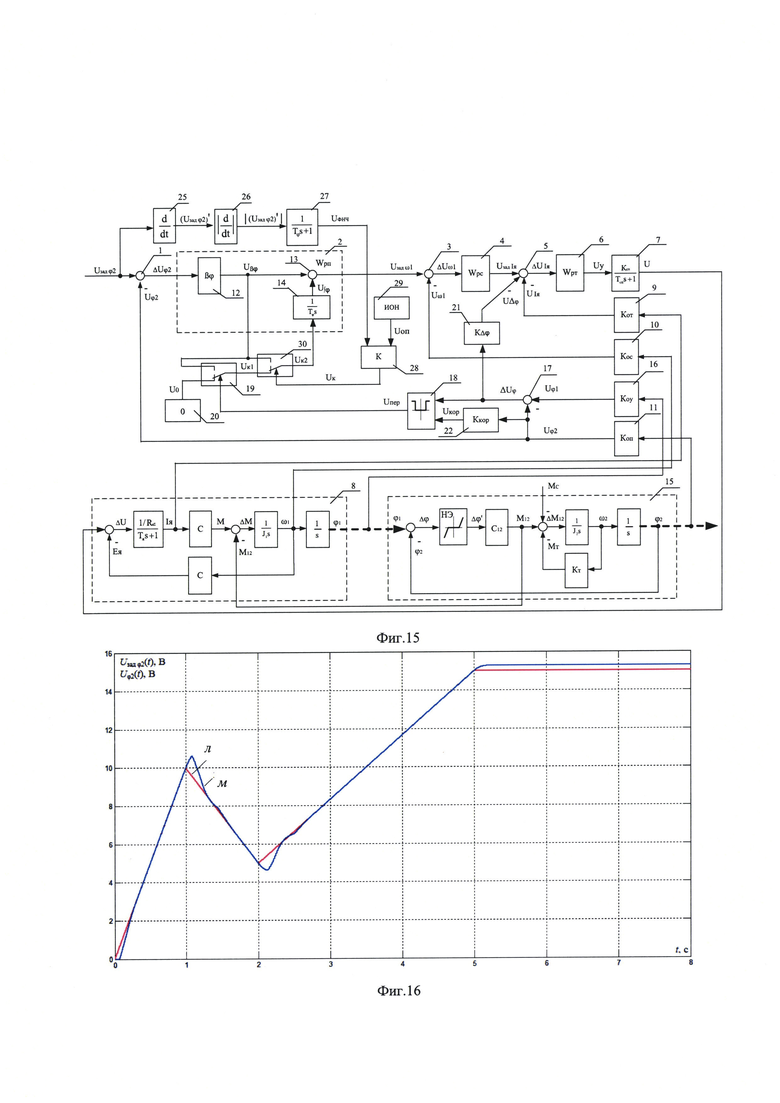
на фиг. 15 представлена структурная схема заявляемого устройства по второму варианту;
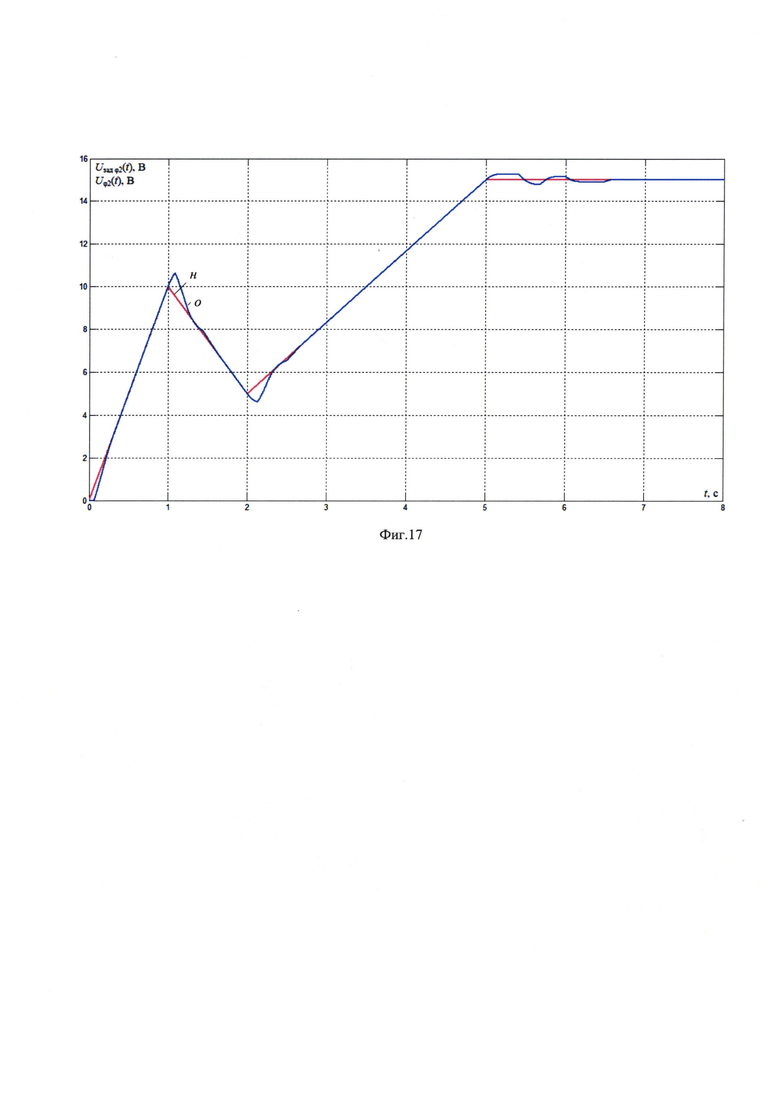
на фиг. 16 приведены результаты компьютерного моделирования работы устройства по первому варианту в режиме слежения и последующего позиционирования при наличии только пропорционального звена в составе регулятора положения;
на фиг. 17 приведены результаты компьютерного моделирования работы устройства по второму варианту в режиме слежения и последующего позиционирования.
Устройство автоматического управления электромеханической системой с зазором в кинематической передаче по первому варианту (фиг. 7) содержит первый элемент сравнения 1, первый неинвертирующий вход которого соединен с источником задающего напряжения Uзад.ϕ2. Выход первого элемента сравнения 1 соединен с первым входом регулятора положения 2. Регулятор положения 2 содержит пропорциональное звено 12 и интегратор 14, подключенные к входам четвертого элемента сравнения 13, выход которого является первым выходом регулятора положения 2. Первый выход регулятора положения 2 соединен с первым неинвертирующим входом второго элемента сравнения 3. Выход второго элемента сравнения 3 через регулятор скорости 4 подключен к первому неинвертирующему входу третьего элемента сравнения 5. Выход третьего элемента сравнения 5 через регулятор тока 6 соединен с входом силового преобразователя 7. Выход силового преобразователя 7 подключен к электродвигателю постоянного тока 8, снабженному датчиком тока 9 соединенным со вторым инвертирующим входом третьего элемента сравнения 5. Датчик скорости 10, размещенный на валу электродвигателя постоянного тока 8, соединен со вторым инвертирующим входом второго элемента сравнения 3. Датчик положения 11, размещенный на выходном валу рабочего органа, соединен со вторым инвертирующим входом первого элемента сравнения 1. Датчик угла поворота 16 подключен к первому неинвертирующему входу пятого элемента сравнения 17. Выход датчика положения 11 соединен со вторым инвертирующим входом пятого элемента сравнения 17 и через блок корректировки параметров зазора 22 соединен с управляющим входом блока оценки состояния зазора 18. Выход пятого элемента сравнения 17 подключен к информационному входу блока оценки состояния зазора 18 и через блок обратной связи по разности углов 21 подключен к третьему инвертирующему входу третьего элемента сравнения 5. Выход блока оценки состояния зазора 18 соединен с управляющим входом коммутатора 19. Нормально открытый контакт коммутатора 19 подключен к выходу пропорционального звена 12, являющемуся вторым выходом регулятора положения 2. Нормально закрытый контакт коммутатора 19 соединен с выходом блока формирования нулевого сигнала 20. Переключающий контакт коммутатора 19 подключен к входу интегратора 14, являющемуся вторым входом регулятора положения 2. В электромеханической системе вал электродвигателя постоянного тока 8 механически соединен с входным валом рабочего органа 15 с обратной связью по моменту М12. В схеме рабочего органа 15 учтены механический зазор (в виде нелинейного элемента), упругость (в виде пропорционального звена С12), момент статического сопротивления Мс на валу рабочего органа, инерционность (в виде момента инерции J2), трение (в виде пропорционального звена Кт). Как и в прототипе в качестве нелинейного элемента, моделирующего зазор в механизмах рабочего органа 15, использована нелинейность вида «зона нечувствительности», характеристика «вход-выход» которой представлена на фиг. 2. Все обозначения и параметры этого нелинейного элемента, указанные для прототипа, сохранены. Вал электродвигателя постоянного тока 8 механически соединен с входным валом рабочего органа 15 и угол поворота вала электродвигателя ϕ1 является тем углом, на который за счет жесткой механической связи поворачивается и входной вал рабочего органа 15.
В реальных условиях после длительной эксплуатации оборудования и определенной выработки механических узлов наблюдается неравномерное распределение величины зазора α в пределах возможных перемещений рабочего органа 15. Для учета указанного влияния должна быть реализована текущая корректировка параметров блока оценки состояния зазора 18, для чего в состав устройства по первому варианту введен блок корректировки параметров зазора 22. Вход блока корректировки параметров зазора 22 соединен с выходом датчика положения 11, от которого на вход блока корректировки параметров зазора 22 поступает напряжение Uϕ2. Выход блока корректировки параметров зазора 22 подключен к управляющему входу блока оценки состояния зазора 18. Блок корректировки параметров зазора 22 обладает переменным коэффициентом усиления Ккор. Назначение блока корректировки параметров зазора 22 поясняется на фиг. 14.а, где представлены зубчаток колесо 23, жестко связанное с выходным валом рабочего органа 15 и зубчатая линейка 24, перемещающаяся под воздействием зубчатого колеса 23. Фиг. 14.б. иллюстрирует неравномерность распределения зазора а в зависимости от перемещения зубчатого колеса 23 по зубчатой линейке 24. Так, в середине зубчатой линейки зазор из-за выработки максимален, при изменении расстояния от начального положения по зубчатой линейке  вправо и влево он уменьшается. Приведенный пример иллюстрирует один из возможных вариантов взаимосвязи
вправо и влево он уменьшается. Приведенный пример иллюстрирует один из возможных вариантов взаимосвязи  и а.
и а.
Устройство автоматического управления электромеханической системой с зазором в кинематической передаче по второму варианту (фиг. 15) содержит первый элемент сравнения 1, первый неинвертирующий вход которого соединен с источником задающего напряжения Uзад.ϕ2. Выход первого элемента сравнения 1 соединен с первым входом регулятора положения 2. Регулятор положения 2 содержит пропорциональное звено 12 и интегратор 14, подключенные к входам четвертого элемента сравнения 13, выход которого является первым выходом регулятора положения 2. Первый выход регулятора положения 2 соединен с первым неинвертирующим входом второго элемента сравнения 3. Выход второго элемента сравнения 3 через регулятор скорости 4 подключен к первому неинвертирующему входу третьего элемента сравнения 5. Выход третьего элемента сравнения через регулятор тока 6 соединен с входом силового преобразователя 7. Выход силового преобразователя 7 подключен к электродвигателю постоянного тока 8 снабженному датчиком тока 9 соединенным со вторым инвертирующим входом третьего элемента сравнения 5. Датчик скорости 10, размещенный на валу электродвигателя постоянного тока 8, соединен со вторым инвертирующим входом второго элемента сравнения 3. Датчик положения 11, размещенный на выходном валу рабочего органа, соединен со вторым инвертирующим входом первого элемента сравнения 1. Датчик угла поворота 16 подключен к первому неинвертирующему входу пятого элемента сравнения 17. Выход датчика положения 11 соединен со вторым инвертирующим входом пятого элемента сравнения 17 и через блок корректировки параметров зазора 22 соединен с управляющим входом блока оценки состояния зазора 18. Выход пятого элемента сравнения 17 подключен к информационному входу блока оценки состояния зазора 18 и через блок обратной связи по разности углов 21 подключен к третьему инвертирующему входу третьего элемента сравнения 5. Выход блока оценки состояния зазора 18 соединен с управляющим входом первого коммутатора 19. Нормально открытый контакт первого коммутатора 19 подключен к выходу пропорционального звена 12, являющемуся вторым выходом регулятора положения 2 и к нормально открытому контакту второго коммутатора 30. Нормально закрытый контакт первого коммутатора 19 соединен с выходом блока формирования нулевого сигнала 20. Переключающий контакт первого коммутатора 19 подключен к нормально закрытому контакту второго коммутатора 30. Переключающий контакт второго коммутатора 30 подключен к входу интегратора 14, являющегося вторым входом регулятора положения 2. Вход блока дифференцирования 25 соединен с неинвертирующим входом первого элемента сравнения 1. Выход блока дифференцирования 25 через последовательно соединенные блок определения модуля 26 и фильтр нижних частот 27 подключен к первому входу компаратора 28. Второй вход компаратора 28 соединен с выходом источника опорного напряжения 29, а выход компаратора 28 подключен к входу второго коммутатора 30. В электромеханической системе вал электродвигателя постоянного тока 8 механически соединен с входным валом рабочего органа 15 с обратной связью по моменту M12. В схеме рабочего органа 15 учтены механический зазор (в виде нелинейного элемента), упругость (в виде пропорционального звена С12), момент статического сопротивления Мс на валу рабочего органа, инерционность (в виде момента инерции J2), трение (в виде пропорционального звена Кт). Как и в прототипе в качестве нелинейного элемента, моделирующего зазор в механизмах рабочего органа 15, использована нелинейность вида «зона нечувствительности», характеристика «вход-выход» которой представлена на фиг. 2. Все обозначения и параметры этого нелинейного элемента, указанные для прототипа, сохранены. Вал электродвигателя постоянного тока 8 механически соединен с входным валом рабочего органа 15 и угол поворота вала электродвигателя ϕ1 является тем углом, на который за счет жесткой механической связи поворачивается и входной вал рабочего органа 15.
Устройство автоматического управления электромеханической системой с зазором в кинематической передаче по варианту (фиг. 7) работает следующим образом.
Перед началом работы проводят исследования состояния зазора, определяя экспериментальным путем величину углового зазора между положением вала электродвигателя постоянного тока 8 и выходного вала рабочего органа 15, обозначенную на фиг. 2 как α. По полученному значению α настраивают переходную характеристику «вход-выход» блока оценки состояния зазора 18, устанавливая значение ΔUα, соответствующее величине углового зазора а так, как показано на фиг. 8.
На первом этапе рассмотрим работу устройства по первому варианту без использования блока обратной связи по разности углов 21 и блока корректировки параметров зазора 22. В этом случае в устройстве отсутствует обратная связь по разности углов (на второй инвертирующий вход третьего элемента сравнения 5 не поступает сигнал UΔϕ). Блок корректировки параметров зазора 22 не вырабатывает на своем выходе напряжения Uкор и не изменяет вид переходной характеристики «вход-выход» блока оценки состояния зазора 18.
Рассмотрим работу устройства по первому варианту, исходя из допущения, что в начальный момент рабочая точка, определяющая текущее состояние нелинейного элемента, моделирующего зазор в механизмах рабочего органа 15, находится в начале координат характеристики «вход-выход», представленной на фиг. 2. При этом начальное значение Uзад.ϕ2 так же равно нулю, поскольку устройство не получило задания на отработку заданной траектории движения. Электродвигатель постоянного тока 8 и рабочий орган 15 не вращаются, ток якоря 1я электродвигателя постоянного тока 8, скорости вращения вала электродвигателя постоянного тока 8 (ωl) и выходного вала рабочего органа 15 (ω2) равны нулю. Положим углы поворота вала электродвигателя постоянного тока 8 и выходного вала рабочего органа 15 в начальный момент равными нулю (ϕl=ϕ2=0). В этом случае напряжения UIя, Uω1, Uϕ1, Uϕ2 на выходах соответственно датчика тока 9, датчика скорости 10, датчика угла поворота вала 16, и датчика положения 11 равны нулю. На выходе пятого элемента сравнения 17 образуется сигнал нулевая разности напряжений ΔUϕ, который, поступая на информационный вход блока оценки состояния зазора 18, формирует на его выходе (в соответствии с переходной характеристикой «вход-выход» блока оценки состояния зазора 18, приведенной на фиг. 8) сигнал переключения Uпер=0. Следовательно на управляющий вход коммутатора 19 поступает нулевой сигнал, первый коммутатор 19 не переключается и его нормально закрытый контакт соединяет выход блока формирования нулевого сигнала 20 со входом интегрирующего звена 14 регулятора положения 2, подавая сигнал нулевого напряжения Uк=U0=0 на вход интегратора 14. Интегрирующее звено 14 исключается из структуры регулятора положения 2, превращая его в П-регулятор с коэффициентом усиления пропорционального звена 12 регулятора положения 2, равным βϕ.
После подачи на вход первого элемента сравнения 1 задающего напряжения Uзад.ϕ2 в виде линейно возрастающего сигнала, последовательно включаются в работу контуры управления. Сначала из-за отсутствия сигнала Uϕ2 (зазор пока не выбран и поворота выходного вала рабочего органа 15 нет) с выхода первого элемента сравнения 1 на вход регулятора положения 2 поступает сигнал максимального напряжения ΔUϕ2, включается в работу пропорциональное звено 12 регулятора положения 2. Тем самым обеспечивается высокая скорость отработки управляющего сигнала, поскольку из контура регулирования положения 2 исключается интегральная составляющая, так как интегрирующее звено 14 регулятора положения выведено из работы. На выходе регулятора положения 2 формируется сигнал Uзад.ω1 и, поскольку на инвертирующий вход второго элемента сравнения 3 пока не поступает сигнал с датчика скорости 10, напряжение Uзад.ω1=ΔUω1 максимально. Регулятор скорости 4 преобразует свое входное сигнал ΔUω1 в Uзад Iя, определяющий заданное значение тока якоря электродвигателя постоянного тока 8. В свою очередь, так как электродвигатель постоянного тока 8 пока не вращается, его ток еще равен нулю, что обуславливает отсутствие сигнала напряжения UIя на выходе датчика тока 9. Сигнал напряжения ошибки по току электродвигателя постоянного тока 8 ΔUIя на выходе третьего элемента сравнения 5 максимален. Он поступает на вход силового преобразователя 7 и преобразуется им в напряжение U, поступающее на якорную обмотку электродвигателя постоянного тока 8. Электродвигатель постоянного тока 8 начинает разгоняться. Появляются ток Iя якоря электродвигателя постоянного тока 8, скорость вращения вала электродвигателя ω1 и угол поворота вала электродвигателя ϕ1. На выходе датчика тока 9, датчика скорости 10 и датчика угла поворота вала 16 появляются сигналы напряжения соответственно UIя, Uω1 и Uϕ1. Замыкаются контуры регулятора тока и скорости. Начинается отработка управляющих и возмущающих воздействий этими контурами. Вал электродвигателя постоянного тока 8, будучи механически жестко связанным с входным валом рабочего органа 15, начинает его поворачивать. Однако, из-за существующего в механизме рабочего органа зазора, представленного на фиг. 7 в виде нелинейного элемента НЭ, обладающего переходной характеристикой по фиг. 2, пока угол поворота входного вала рабочего органа не достигнет величины b, поворота выходного вала рабочего органа 15 не будет. До этого момента сигнал напряжение Uϕ1 с выхода датчика угла поворота 16 вала электродвигателя постоянного тока 8 поступает на неинвертирующий вход пятого элемента сравнения 17 и дальше на вход управляющий блока оценки состояния зазора 18. Реализуемая этим блоком нелинейность, переходная характеристика «вход-выход» которой приведена на фиг. 8, формирует на своем выходе нулевое напряжение Uпер до тех пор, пока угол поворота ϕ1 вала электродвигателя постоянного тока 8 не достигнет величины b, то есть до того момента, когда зазор будет выбран. Из-за того, что ϕ2=0, на инвертирующий вход первого элемента сравнения 1 напряжение не поступает, ΔUϕ2 максимально, разгон электродвигателя постоянного тока 8 продолжается. Если при этом ΔUϕ на управляющем входе блока оценки состояния зазора 18 не превышает ΔUb, в составе регулятора положения 2 остается работающим только пропорциональное звено 12. Если же ΔUϕ на входе блока оценки состояния зазора 18 превысит ΔUb, на управляющем входе коммутатора 19 появляется напряжение Uпер, что заставляет его контакты переключиться. Нормально-открытый контакт коммутатора 19 замыкается, нормально-закрытый - размыкается. На вход интегратора 14 подключается напряжение Uβϕ с выхода пропорционального звена 12 регулятора положения 2 (тогда Uк=Uβϕ), структура регулятора положения 2 преобразуется в ПИ, что минимизирует ошибку регулирования.
После достижения углом поворота вала электродвигателя постоянного тока 8 величины b начинает поворачиваться выходной вал рабочего органа 15, на выходе датчика положения 11 появляется сигнал Uϕ2. Он поступает на инвертирующий вход первого элемента сравнения 1, замыкая обратную связь по положению выходного вала рабочего органа. Кроме этого появившееся на выходе датчика положения 11 сигнал Uϕ2 поступает на инвертирующий вход пятого элемента сравнения 17. Разность ΔUϕ появляется на управляющем входе блок оценки состояния зазора 18 и анализируется этим блоком так, как было представлено выше, изменяя структуру регулятора положения 2. Тем самым работа устройства сопровождается перестройкой структуры регулятора положения (П-ПИ), что повышает точность регулирования при достаточно высоком быстродействии. Если задающее напряжение Uзад.ϕ2 будет снижаться, что может потребоваться для отработки заданной траектории движения вала рабочего органа 2, логика функционирования устройства сохранится.
Для безразрывного сопряжения фазовых траекторий устройства управления при ее возвращении в линейную зону работы, в режиме раскрытия зазора следует отключать от системы не выход, а вход интегрирующего звена 14, прерывая его интегрирование, но сохраняя информацию, накопленную им к моменту раскрытия зазора. При этом задача изменения структуры состоит не в замедлении переходных процессов и повышении степени демпфирования в системе во время прохождения зазора, а в прекращении функционирования или изменении свойств интегрирующих элементов в эти моменты времени для исключения режима накопления паразитной информации о неполностью управляемом состоянии системы и снижении отрицательного фазового сдвига амплитудно-фазовой частотной характеристики линейной части устройства.
Результаты компьютерного моделирования работы устройства по первому варианту при отсутствии обратной связи по разности углов и блока корректировки параметров зазора в виде переходных характеристик Uзад.ϕ2 (t) приведены на графике д (фиг. 9) и напряжения на выходе датчика положения 11 Uϕ2 (t) вала рабочего органа 15 (пропорционального величине угла поворота выходного вала ϕ2 рабочего органа 15) приведены на графике е (фиг.9) для заданных параметров элементов устройства. Здесь входной задающий сигнал, как и при исследовании прототипа, линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), затем линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 10 вольт линейно на временном интервале от 2 с до 3,5 с. Величину α, как и при исследовании прототипа, принимаем равной 0,2 рад. Анализ графика е (фиг. 9) указывает на отсутствие существенных колебаний угла поворота выходного вала ϕ2 рабочего органа 15, что подтверждает эффективность использования предлагаемого технического решения.
При увеличении величины зазора а (в случае экспериментальных исследований с указанными выше параметрами элементов, узлов и блоков граничное значение α=0,4 рад), применяемый ранее алгоритм переключения П-ПИ-регулятора положения 2 оказывается не в состоянии компенсировать влияние нелинейного элемента НЭ, что приводит к возникновению незатухающих колебаний регулируемой величины, как это проиллюстрировано на фиг. 10, где приведены результаты компьютерного моделирования в виде переходные характеристики Uзад.ϕ2 (график з) и напряжения на выходе датчика положения Uϕ2 (t) вала рабочего органа 15 (пропорционального величине угла поворота ϕ2 вала рабочего органа 15) (график ж). Здесь входной задающий сигнал, как и при исследовании прототипа, линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), затем линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 10 вольт линейно на временном интервале от 2 с до 3,5 с, но по сравнению с предыдущим режимом величина α выбрана равной 0,4 рад. Видно, что качество переходных процессов ухудшается. Объяснением ухудшения работоспособности устройства в данном режиме является пересечение амплитудно-фазовой частотной характеристики линейной части системы автоматического управления и обратной амплитудно-фазовой характеристики нелинейного элемента на амплитудно-фазовой плоскости, что показано на фиг. 11. Цифрой V на фиг. 11 обозначена амплитудно-фазовая частотная характеристика линейной части устройства без дополнительной обратной связи по разности углов поворота валов электродвигателя постоянного тока 8 и выходного вала рабочего органа 15. Цифрой VI на фиг. 11 обозначена обратная амплитудно-фазовая характеристика нелинейного элемента НЭ.
Анализ структуры устройства по первому варианту (фиг. 7) и ее частотного «портрета» (фиг. 11), показывает, что возникновение автоколебаний объясняется сохранением значительного фазового сдвига амплитудно-фазовой частотной характеристики линейной части системы автоматического управления, во многом обусловленным влиянием естественного интегратора в составе рабочего органа 15, преобразующего угловую скорость ω1 ротора двигателя постоянного тока 8 в угловое положение ϕ1 и лишающегося стабилизирующих обратных связей по упругому моменту М12 во время раскрытия зазора. Очевидно, что возможность исключения такого интегратора из структуры фиг. 7, аналогично тому, как это было сделано для интегральной составляющей регулятора положения, в данном случае отсутствует.
Раскрытие зазора приводит к размыканию контура обратной связи по положению рабочего органа 15 и значительному повышению темпа переходных процессов, ограничиваемому лишь быстродействием сохраняющегося контура обратной связи по скорости электродвигателя постоянного тока 8. При этом на выходе регулятора положения формируется значительный сигнал задания, который быстро отрабатывается внутренним контуром скорости, приводя к высокому темпу изменения углового положения вала электродвигателя постоянного тока 8 в отсутствии указанных выше стабилизирующих связей. Большое различие темпов изменения углового положения вала электродвигателя постоянного тока 8 при раскрытом и выбранном зазоре приводит к соответствующему рассогласованию фазовых траекторий нелинейной следящей системы и способствует возникновению автоколебаний.
С целью разрешения проблемы присутствия естественного интегратора в составе рабочего органа 15 и улучшения частотного «портрета» устройства по первому варианту в состав его структуры введена дополнительная отрицательная обратная связь по разности углов перемещений электродвигателя постоянного тока 8 и рабочего органа 15, организованная за счет блока обратной связи по разности углов 21, подающего свое выходное напряжение, пропорциональное разности углов UΔϕ на второй инвертирующий вход третьего элемента сравнения 5, а через него на вход регулятора тока 6 (фиг. 7). Действие такой обратной связи является аналогичным влиянию упругого момента т.е. оказывает стабилизирующий эффект, приближая по свойствам интегратор к позиционному звену и, соответственно, снижая фазовый сдвиг амплитудно-фазовой частотной характеристики линейной части устройства по первому варианту в области расположения обратной характеристики нелинейного элемента.
На втором этапе рассмотрим работу устройства по первому варианту с использованием блока обратной связи по разности углов 21 и блока корректировки параметров зазора 22. В этом случае в устройстве присутствует обратная связь по разности углов и на второй инвертирующий вход третьего элемента сравнения 5 поступает напряжение UΔϕ. Блок корректировки параметров зазора 22 вырабатывает на своем выходе напряжения Uкор и изменяет вид переходной характеристики «вход-выход» блока оценки состояния зазора 18 в зависимости от снятой заранее характеристики неравномерного распределения зазора по длине. Как и на первом этапе перед началом работы проводят исследования состояния зазора, определяя экспериментальным путем величину углового зазора между положением вала электродвигателя постоянного тока 8 и выходного вала рабочего органа 15, обозначенную на фиг. 2 как α, но с учетом того, что данный параметр меняется в зависимости от угла поворота выходного вала ϕ2 рабочего органа 15. По полученным значениям настраивают переходную характеристику «вход-выход» блока оценки состояния зазора 18, устанавливая значение ΔUa, соответствующее величине углового зазора а при нулевом угле поворота ϕ2 так, как показано на фиг.8. Кроме этого заносят информацию о зависимости а от угла поворота выходного вала ϕ2 в структуру блока корректировки параметров зазора 22. При изменении текущего значения ϕ2 этот блок изменяет настройку блока оценки состояния зазора 18 в зависимости от текущего значения ϕ2.
Работа контура обратной связи по разности углов не изменяет порядка работы остальной части устройства, которая рассмотрена ранее. Для организации этой обратной связи в устройстве по первому варианту предусмотрен блок обратной связи по разности углов 21, на вход которого поступает напряжение ΔUϕ с выхода пятого элемента сравнения 17. Это напряжение будучи усиленным в блоке обратной связи по разности углов 21 с коэффициентом передачи КΔϕ, поступает на второй инвертирующий вход третьего элемента сравнения 5. Тем самым удается скомпенсировать негативное влияние интегратора с передаточной функцией 1/s, присутствующего в структуре электродвигателя постоянного тока 8 и преобразующего угловую скорость ω1 вала двигателя в угол его поворота ϕ1.
Указанная обратная связь не коммутируется и действует постоянно, поскольку ее коэффициент усиления устанавливается существенно ниже значения коэффициента С12 и упругости кинематической передачи и не требует перестройки системы автоматического управления в линейной зоне работы. Однако при раскрытии зазора и исчезновении упругого момента M12 такая дублирующая обратная связь оказывается достаточной для стабилизации естественного интегратора и снижения темпа изменения положения вала электродвигателя постоянного тока 8 при выборке зазора. Отсутствие в этом контуре дополнительных коммутирующих элементов обеспечивает лучшее согласование фазовых траекторий системы при переходах из линейного режима работы в нелинейный и обратно.
Введение дополнительной обратной связи по разности углов поворота валов электродвигателя постоянного тока 8 и выходного вала рабочего органа 15 Δϕ позволяет повернуть амплитудно-фазовую частотную характеристику линейной части устройства против часовой стрелки, т.о. амплитудно-фазовая частотная характеристика линейной части системы будет «огибать» характеристику НЭ с ней не пересекаясь. Результаты компьютерного моделирования работы устройства по первому варианту при наличии обратной связи по разности углов приведены фиг. 12. Переходные характеристики Uзад.ϕ2 (t) приведены на графике и (фиг. 12) и напряжения на выходе датчика положения 11 Uϕ2 (t) вала рабочего органа 15 (пропорционального величине угла поворота выходного вала ϕ2 рабочего органа 15) приведены на графике к (фиг. 12) для заданных параметров элементов устройства. В данном эксперименте величина α=0,4 рад, КΔϕ=100. Входной задающий сигнал Uзад.ϕ2, как и при исследовании прототипа, линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), затем линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 10 вольт линейно на временном интервале от 2 с до 3,5 с. Анализ результатов, приведенных на фиг. 12 доказывает эффективность введения дополнительной обратной связи по разности углов поворота валов, поскольку динамическая ошибка на всем протяжении эксперимента снизилась. На фиг. 13 приведены амплитудно-фазовая частотная характеристика линейной части устройства по второму варианту (график VII) и обратная амплитудно-фазовая характеристика нелинейного элемента (график VIII), объясняющие эффект уменьшения динамической ошибки за счет того, что характеристики линейной и нелинейной частей устройства по первому варианту не пересекаются.
Анализ частотных характеристик и соответствующих модельных расчетов, необходимая для исключения автоколебаний трансформация амплитудно-фазовой частотной характеристики линейной части устройства достигается в условиях больших зазоров только при совместном использовании перестройки структуры регулятора положения 2 и введения дополнительной обратной связи по разности углов перемещений электродвигателя постоянного тока 8 и рабочего органа 15.
Следует также уточнить, что блок оценки состояния зазора 18 оценивает разницу угловых перемещений электродвигателя постоянного тока 8 и рабочего органа 15 с использованием априорной информации о величине зазора, заранее измеренной до ввода системы в работу. Если после длительной эксплуатации оборудования и определенной выработки механических узлов будет наблюдаться неравномерное распределение величины зазора в пределах возможных перемещений рабочего органа 15, в системе может быть реализована текущая корректировка параметра блока оценки состояния зазора 18 при изменении положения рабочего органа 15 за счет блока корректировки параметров зазора 22. При медленных процессах такой адаптации они не будут оказывать дестабилизирующего влияния на динамику исходной системы, но повысят эффективность компенсации неравномерного зазора.
Работа устройства по второму варианту происходит следующим образом. Для данного варианта реализации устройства показателен режим позиционирования, заключающийся в том, что задающее напряжение Uзад.ϕ2 после выхода в точку позиционирования поддерживается постоянным и не равным нулю, что требует от угла поворота вала рабочего органа 15 поддержания постоянной величины ϕ2, соответствующей заданному значению. Рассмотрим, как этот режим отрабатывает устройство по первому варианту (фиг. 7), предполагая, что после выхода в точку позиционирования переключающий контакт первого коммутатора 19, который перестраивал структуру регулятора положения 2 для предотвращения возникновения автоколебаний под влиянием нелинейности типа «зазор», может находиться в нижнем положении, обеспечивая пропорциональный вид передаточной функции регулятора положения 2, когда на вход интегрирующего блока 14 от блока формирования нулевого сигнала 20 поступает нулевое напряжение Uк=U0=0. На управляющий вход первого коммутатора 19 поступает нулевой сигнал, первый коммутатор не переключается и его нормально закрытый контакт соединяет выход блока формирования нулевого сигнала 20 со входом интегрирующего звена 14 регулятора положения 2, подавая нулевое напряжение Uк=U0=0 на вход интегрирующего звена 14. Интегрирующее звено 14 исключается из структуры регулятора положения 2, превращая его в П-регулятор с коэффициентом усиления пропорционального звена 12 регулятора положения 2, равным βϕ.
Для анализа работоспособности устройства по первому варианту в режиме позиционирования было проведено компьютерное моделирование, результаты которого приведены на фиг. 16, где указаны переходные характеристики Uзад.ϕ2 (t) (график л) и напряжения на выходе датчика положения 11 Uϕ2 (t) вала рабочего органа 15 (пропорционального величине угла поворота выходного вала ϕ2 рабочего органа 15) (график м) для заданных параметров элементов устройства. В данном эксперименте величина α=0,4 рад, КΔϕ=100, Мс=0.5 Н⋅м. Здесь входной задающий сигнал линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), так же линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 15 вольт линейно на временном интервале от 2 с до 5 с. После выхода в режим позиционирования (временной интервал от 5 с до 8 с) задающее напряжение поддерживается постоянным на уровне 15 В.
Анализ переходных характеристик, приведенных на фиг. 16 указывает на возникновение значительной статической ошибки угла поворота выходного вала ϕ2 рабочего органа 15 в момент перехода устройства по варианту 1 от слежения к позиционированию (участок от 5 с до 8 с на фиг. 16). В этом режиме устройство по первому варианту не способно в достаточной степени скомпенсировать статическую ошибку по заданию, возникающую, в том числе, под действием тормозящего реактивного момента сопротивления Мс. Следовательно, устройство по варианту 1 не обеспечивает высокой точности в режиме позиционирования.
Рассмотрим работу устройства по варианту 2. При изменении Uзад.ϕ2 (t) в режиме слежения (временной отрезок от нулевого момента до 5 с по фиг. 17) производная сигнала задания отлична от нуля, блок дифференцирования 25 формирует на своем выходе напряжение (Uзад.ϕ2)' не равное нулю. Модуль этого напряжения ⎢(Uзад.ϕ2)'⎢ на выходе блока определения модуля 26 будет положительным. Пройдя через фильтр нижних частот 27, необходимый для предотвращения ложного срабатывания второго коммутатора 30 из-за возможных помех в сигнале задания, сигнал в виде напряжения UФНЧ поступает на первый вход компаратора 29. Напряжение на втором входе компаратора Uоп, равное нулю, формируется на выходе источника опорного напряжения 29. Сравнивая два напряжения на своих входах, компаратор 28 вырабатывает на своем выходе напряжение Uк, подключаемое к управляющему входу второго коммутатора 30 по следующему принципу:
Если задающее напряжение Uзад.ϕ2 (t) изменяется (режим слежения), UФНЧ>Uоп=0, тогда Uк=0 и второй коммутатор 30 не переключается, а его нормально-закрытый контакт остается замкнутым. В этом случае второй коммутатор 30 не влияет на работу устройства и не препятствует переключению структуры, как это было рассмотрено для устройства по варианту 1. Тем самым удается добиться предотвращения возникновения автоколебаний под влиянием нелинейности типа «зазор».
Если изменений Uзад.ϕ2 (t) нет (режим позиционирования) UФНЧ=Uоп=0, тогда Uк>0 и второй коммутатор 30 переключается таким образом, что замыкается его нормально-открытый контакт, подключая напряжение с выхода пропорционального звена 12 на вход интегрирующего звена 14. Тем самым исключается возможность влияния первого коммутатора 19 на работу устройства, используемое в режиме слежения, и иногда приводящее к появлению для устройства по первому варианту большой статической ошибки в режиме позиционирования.
Блок дифференцирования 25, блок определения модуля 26, фильтр низких частот 27, компаратор 28, источник опорного напряжения 29 позволяют выявить переход от режима слежения к режиму позиционирования и с помощью второго коммутатора 30 настроить структуру к эффективной и точной работе с учетом того, в каком режиме (слежения или позиционирования) находится устройство по второму варианту.
Оценим эффективность работы устройства по второму варианту, анализируя результаты компьютерного его моделирования при тех же параметрах и временных интервалах, что применялись для моделирования устройства по первому варианту. Вид переходных характеристик в режиме слежения и последующего позиционирования для устройства по второму варианту приведен на фиг. 17. На нем указаны переходные характеристики Uзад.ϕ2 (t) (график н) и напряжения на выходе датчика положения 11 Uϕ2 (t) вала рабочего органа 15 (пропорционального величине угла поворота ϕ2 вала рабочего органа 15) (график о) для заданных параметров элементов устройства. В данном эксперименте величина α=0,4 рад, КΔϕ=100, Мс=0.5 Н⋅м. Здесь входной задающий сигнал линейно нарастает от нуля до 10 вольт (с нулевого момента времени до 1 с), так же линейно снижается от 10 до 5 вольт (на временном интервале от 1 с до 2 с) и увеличивается от 5 до 15 вольт линейно на временном интервале от 2 с до 5 с. После выхода в режим позиционирования (временной интервал от 5 с до 8 с) задающее напряжение поддерживается постоянным на уровне 15 В.
До момента выхода устройства из режима слежения (участок 0-5 с на фиг. 17) устройство по второму варианту работает аналогично устройству по первому варианту. В момент прекращения изменения Uзад.ϕ2 (t) (момент 5 с на фиг. 17) устройство перестраивается с учетом выхода в режим позиционирования, снижая величину статической ошибки по углу поворота выходного вала ϕ2 рабочего органа 15.
Итак, реализация предложенных технических решений обеспечивает повышение точности регулирования положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, в составе которых присутствуют механизмы с зазорами между элементами механических передач, требующие компенсации. Заявлены два варианта устройства автоматического управления электромеханической системой с зазором в кинематической передаче. Устройство по первому варианту, содержащее три элемента сравнения, регулятор положения, включающий пропорциональное звено, интегратор и четвертый элемент сравнения, регулятор скорости, регулятор тока, силовой преобразователь, датчик тока, датчик скорости, датчик положения, дополнительно содержит датчик угла поворота, пятый элемент сравнения, блок оценки состояния зазора, коммутатор, блок формирования нулевого сигнала, блок обратной связи по разности углов и блок корректировки параметров зазора. Устройство по второму варианту, содержащее три элемента сравнения, регулятор положения, включающий пропорциональное звено, интегратор и четвертый элемент сравнения, регулятор скорости, регулятор тока, силовой преобразователь, датчик тока, датчик скорости, датчик положения, дополнительно содержит датчик угла поворота, пятый элемент сравнения, блок оценки состояния зазора, два коммутатора, блок формирования нулевого сигнала, блок обратной связи по разности углов, блок корректировки параметров зазора, блок дифференцирования, блок определения модуля, фильтр нижних частот, компаратор и источник опорного напряжения. Технический результат - повышение точности регулирования положения. 2 н.п. ф-лы, 17 ил.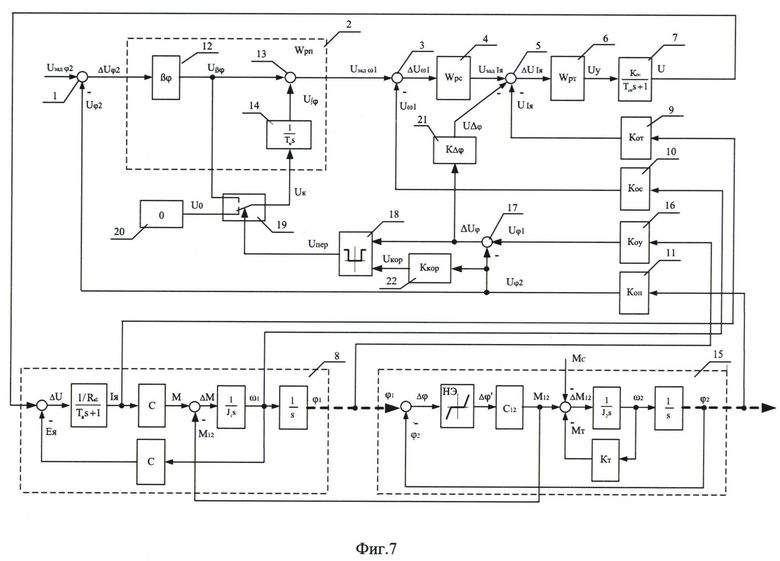
1. Устройство автоматического управления электромеханической системой с зазором в кинематической передаче, содержащее первый элемент сравнения, первый неинвертирующий вход которого соединен с источником задающего напряжения, а выход через регулятор положения соединен с первым неинвертирующим входом второго элемента сравнения, выход которого через регулятор скорости подключен к первому неинвертирующему входу третьего элемента сравнения, выход третьего элемента сравнения через регулятор тока соединен с входом силового преобразователя, выход которого подключен к электродвигателю постоянного тока, снабженному датчиком тока, соединенным со вторым инвертирующим входом третьего элемента сравнения, датчик скорости, размещенный на валу электродвигателя постоянного тока, соединенный со вторым инвертирующим входом второго элемента сравнения, датчик положения, размещенный на выходном валу рабочего органа, соединенный со вторым инвертирующим входом первого элемента сравнения, при этом регулятор положения содержит пропорциональное звено и интегратор, подключенные к входам четвертого элемента сравнения, выход которого является выходом регулятора положения, отличающееся тем, что дополнительно содержит датчик угла поворота, размещенный на валу электродвигателя постоянного тока, пятый элемент сравнения, блок оценки состояния зазора, коммутатор, блок формирования нулевого сигнала, блок обратной связи по разности углов и блок корректировки параметров зазора, при этом датчик угла поворота подключен к первому неинвертирующему входу пятого элемента сравнения, выход датчика положения соединен со вторым инвертирующим входом пятого элемента сравнения и через блок корректировки параметров зазора соединен с управляющим входом блока оценки состояния зазора, выход пятого элемента сравнения подключен к информационному входу блока оценки состояния зазора и через блок обратной связи по разности углов подключен к третьему инвертирующему входу третьего элемента сравнения, выход блока оценки состояния зазора соединен с управляющим входом коммутатора, нормально открытый контакт коммутатора подключен к выходу пропорционального звена, являющемуся вторым выходом регулятора положения, нормально закрытый контакт коммутатора соединен с выходом блока формирования нулевого сигнала, а переключающий контакт коммутатора подключен к входу интегратора, являющемуся вторым входом регулятора положения.
2. Устройство автоматического управления электромеханической системой с зазором в кинематической передаче, содержащее первый элемент сравнения, первый неинвертирующий вход которого соединен с источником задающего напряжения, а выход через регулятор положения соединен с первым неинвертирующим входом второго элемента сравнения, выход которого через регулятор скорости подключен к первому неинвертирующему входу третьего элемента сравнения, выход третьего элемента сравнения через регулятор тока соединен с входом силового преобразователя, выход которого подключен к электродвигателю постоянного тока, который соединен через датчик тока со вторым инвертирующим входом третьего элемента сравнения и через датчик скорости со вторым инвертирующим входом второго элемента сравнения, вал электродвигателя постоянного тока механически соединен с входным валом рабочего органа, выходной вал рабочего органа через датчик положения соединен со вторым инвертирующим входом первого элемента сравнения, при этом регулятор положения содержит пропорциональное звено и интегратор, подключенные к входам четвертого элемента сравнения, выход которого является выходом регулятора положения, отличающееся тем, что дополнительно содержит датчик угла поворота, размещенный на валу электродвигателя постоянного тока, пятый элемент сравнения, блок оценки состояния зазора, два коммутатора, блок формирования нулевого сигнала, блок обратной связи по разности углов, блок корректировки параметров зазора, блок дифференцирования, блок определения модуля, фильтр нижних частот, компаратор и источник опорного напряжения, при этом датчик угла поворота подключен к первому неинвертирующему входу пятого элемента сравнения, выход датчика положения соединен со вторым инвертирующим входом пятого элемента сравнения и через блок корректировки параметров зазора соединен с управляющим входом блока оценки состояния зазора, выход пятого элемента сравнения подключен к информационному входу блока оценки состояния зазора и через блок обратной связи по разности углов подключен к третьему инвертирующему входу третьего элемента сравнения, выход блока оценки состояния зазора соединен с управляющим входом первого коммутатора, нормально открытый контакт первого коммутатора подключен к выходу пропорционального звена, являющегося вторым выходом регулятора положения, и к нормально открытому контакту второго коммутатора, нормально закрытый контакт первого коммутатора соединен с выходом блока формирования нулевого сигнала, переключающий контакт первого коммутатора подключен к нормально закрытому контакту второго коммутатора, переключающий контакт второго коммутатора подключен к входу интегратора, являющегося вторым входом регулятора положения, вход блока дифференцирования соединен с неинвертирующим входом первого элемента сравнения, выход блока дифференцирования через последовательно соединенные блок определения модуля и фильтр нижних частот подключен к первому входу компаратора, второй вход которого соединен с выходом источника опорного напряжения, а выход компаратора подключен к входу второго коммутатора.
| Передвижной ковшевой транспортер для выгрузки рыбы | 1934 |
|
SU43837A1 |
| Устройство для управления двухдвигательным электроприводом | 1988 |
|
SU1577054A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| WO 1999022904 A2, 14.05.1999. | |||

