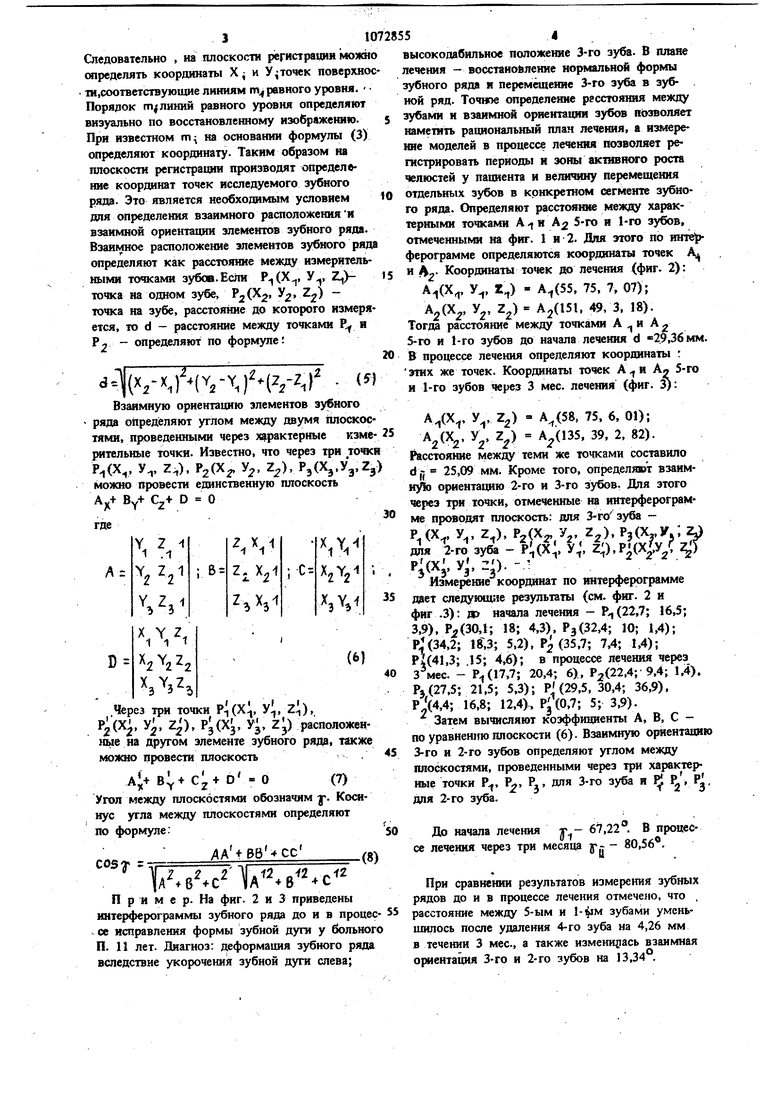
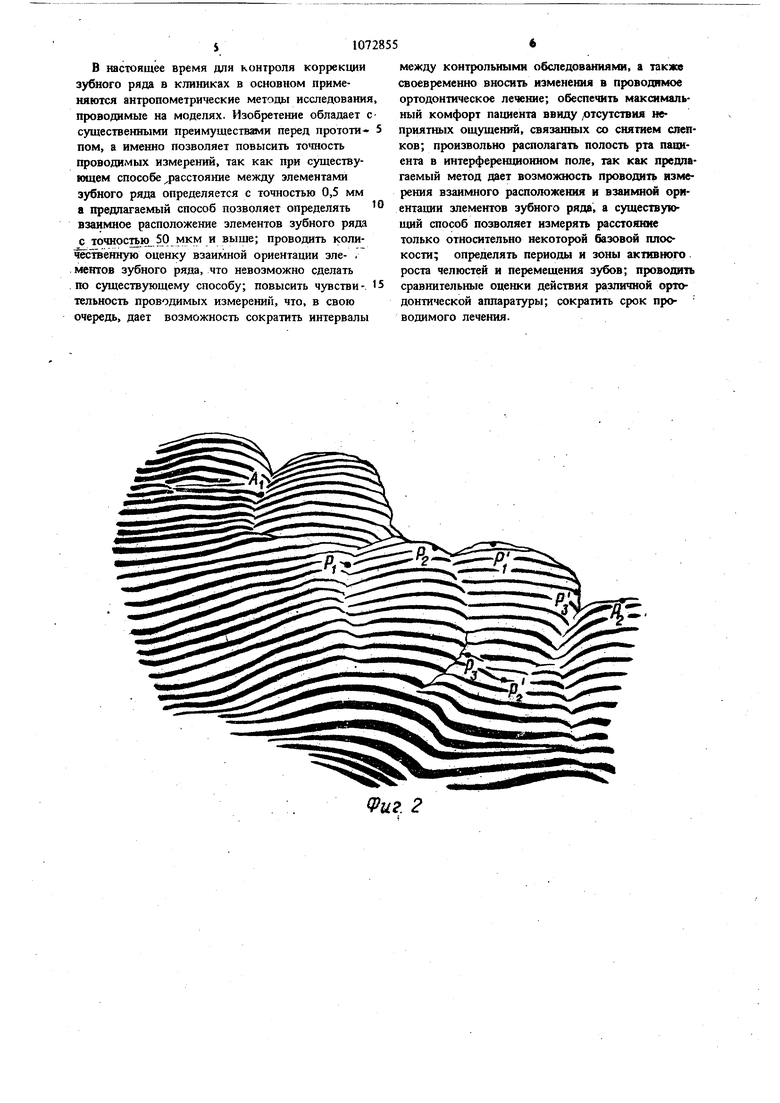
Изобретение относится к медицине, а именно к стоматологии, и может быть использовано для диагностики, планирования лечения и контроля коррекции зубного ряда при ортодоитичес ком лечении зубо-челюстных аномалий. Известен фотометрический способ контроля коррекции зубного ряда, позволяющий, сравнивая фотографии больного до, в процессе и после лечения, производить различные измерения и выяснить изменения, происшедшие в процессе лечения. При этом используются фотографии ли ца в фас и в профиль, фотосъемка при помощи 2-х зеркал 1). Недостатком этого способа является то, что для.сравнения необходимо получать идентичные снимки, что является технически сложной проц дурой из-за необходимости точной фиксации зубо-челюстной системы. Кроме того изображения зубо-челюстной системы сглажены за счет , мягких тканей лица. Так как изображения, полученные в фотографии, плоские, то возникают . искажения в передаче размеров. Все указанные недостатки значительно снижают точность измерений. Наиболее близким к изобретению по технической сущности и достигаемому эффекту является способ контроля коррекции зубного I ряда, предусматривающий регистрацию контрольных изображений зубного ряда, сравнение . последних между собой и определение степени коррекции 2. Цель изобретения - повышение точности контроля коррекции зубного ряда. Цель достигается способом контроля коррекции зубного ряда, предусматривающим регистрацию контрольных изображений зубного ряда, cpaBHemie последних между собой и оцределение степени коррекции, согласно которому получение контрольных изображений осуществляют путем формирования на зубном ряду интерференционного поля, восстановленного с голограммы с зарегистрированными на ней двумя коллимированными пучкалт, а степень коррек-. цки определяют по взаимному расположению и взаимной ориентации элементов зубного ряда в зависимости от пространственной частоты/ и ориентации интерференционных полос иа контрольных изображениях. На фиг. 1 изображена принципиальная схема устройства, реализующего способ контроля коррекции зубного ряда; на фиг. 2 и 3 - интерферограммы зубного ряда, полученные до начала лечения и Через 3 мес. после начала лече«ия-., Предварительно на фотопластинке регистрируют голограмму последовательно двух коллимированных пучков, которые перекрываются од углом 2 в , при этом опорш 1Й пучок стается ие)1зменным. После обработки фотопла тинка-голограмма должна освещаться также порным пучком. Способ реализуют с помощью устройства, соержащего гелий-неоновый лазер 1, днафрагму 2, отозатвор с коллиматором 3, фотопластинку 4 с зарегистрированными на ней дбумя коплямированными пучками н фотоаппарат 5. В результате освещения пластинки 4 опорным пучком от лазера 1 с последней восстанавливаются два зарегистрированных коллимированных пучка, которые интерферируют и создают в пространстве, где они перекрываются, интерференционное поле с эквидистантным щагом полос, определяемым величиной угла 28: яЬ- « где Л - длина волны излучения; 2 6 - угол перекрьгаания двух лучей при записи голограммы на пластине 4. Обследуемый зубной ряд 6 помещается в созданное таким образом итерферешоюнное поле, при этом ив его поверхности наблюдаются интерференционные полосы. 1ак как полосы расположены эквидистантно через интервал, равный h, то на поверхиост объекта они могут laKTOBaTbCH как его топогртфическая карта. Ввиду инвариантности фррмы поверхности зу&юй ряд пациента может быть произвольно ориенгарован относительно системы эквидистан тын интерфбренцно1сиых полос. После получения голографической топографической интерферограммы производят обработку зарегистрированной иа фотопленке фотоаппарата 5 информации. Регистрация интерференщюн ней картины основьгаается на проекции трехмерного изображения объекта на плоскость регистрации ХОУ. Эта проекция осуществляется объективом фотоаппарата. Пусть зубной ряд расположен в системе кооршшат OXyz, поверхность объекта задана уравненнем следующего вида: 2 F(x, у)(2) Интерференционные линии равного уровня, локализованные на поверхности объекта, можно представить как результат сечения поверхности (жстемсж эквидистантных плоскостей 2 - порядок линии; ЭФФ Ь - эффективная длина волны. Проекции интерференционных полос на плоскость регистрации ХОУ могут быть представлены в спедушцем виде: ,-(У) Следовательно , на плоскости регистрация можн определять координаты X и У уточек ловерхно ти,соответствую1цие линиям т равного уровня. Порядок mj линий равного уровня определяют визуально но восстановленному изображению. При известном т на основании формулы (3) определяют координату. Таким образом на плоскости регистрации производят определение координат точек исследуемого зубного ряда. Это является необходимым условием для определения взаимного расположения и взаимной ориентации элементов зубного ряда. Взаимное расположение элементов зубного ряд определяют как расстояние между измерительными точками зубов.Если , У.,, 2Ц)точка на одном зубе, точка на зубе, расстояние до которого измеря ется, то d - расстояние между точками Р и 2 определяют по формуле: (. Взаимную орнентацию элементов зубного ряда определяют углом между двумя плоскостями, проведенныАШ через характерные кзме рительные точки. Известно, что через три ( р(х, у, Z;,), Р2(Х2, у, z), Рэ(Хз,Уз,гз можно провести единственную плоскость AJJ+ BY+ С2+ D О где .Через три точки Р (Х, У, Z), , У. Z). РЭ(Х, УЗ 2р расположенные на другом элементе зубного ряда, также можно провести плоскость AJJ+ BY+ о О(7) Угол между плоскостями обозначим f. Косинус угла между плоскостями определяют по формуле; 4AtB6j+Cc COST -.1 1( П Р и м е р. На фиг. 2 и 3 приведены интерферограммы зубного ряда до н в процессе исправления формы зубной дуги у больного П. И лет. Диагноз: деформация зубного ряда вследствие укорочения зубной дуги слева; высокопабильное положение 3-го зуба. В плане лечения - восстановление нормальной формы зубного ряда и перемещение 3-го зуба в зуб- . ной ряд. Точиле определение расстояния между зубаМи и взаимной ориентации зубов позволяет наметить рациональный план лечения, а язмереirae моделей в процессе лечения позволяет регистрировать периоды и зоны ак1ивнся-о роста челюстей у пациента и величину перемещения отдельных зубов в конкретном сегменте зубного ряда. Определяют расстояюю между характерным точками u А2 5-го и 1-го зубов, отмеченными на фиг. 1 и 2. Дпя этого по ферограмме определяются координаты точек А. и Координаты точек до лечения (фиг. 2): А.,(Х, У, - А(55, 75, 7, 07); , У, Z) A2(l5l, 49, 3, 18). Тогда расстояние между точками А и А 5-го и 1-го зубов до начала лечешы d ,36 мм. В процессе лечения определяют координаты t этих же точек. Координаты точек А 5-го и 1-го зубов через 3 мес. лечения (фиг. З): А(Х, У, Z) А(58. 75, 6, 01); , У, Z) А(135. 39, 2, 82). Расстояние между теми же точками составило djj 25,09 мм. Кроме того, определяют взаимн ориентацию 2-го и 3-го зубов. Для этого через три точкн, отмеченные на интерферограмме проводят плоскость: для 3-го зуба - Р (Х, У, Z), Р2(Х2, У. Z), РЗ(Х,,У 2L) ДЛЯ 2-го зуба - Р;(Х;, У, z;),P(X/,y С 21} P/Y v 1 - хл с. J 3 3 Измерение координат по янтерферограмме дает следующие результаты (см. фиг. 2 и фиг .3): до начала лечения - Р., (22,7; 16,5; 3,9), Р(30,1; 18; 4,3), Рз(32,4; 10; 1,4); Р|(34,2; 5,2), Р2 (35,7; 7,4; 1,4); Pl(41,3; .15; 4,6); в процессе лечения через 3 мес. - Pi(17,7; 20,4; 6), Р2(22,4; 9,4; 1,4), PJ (27,5; 21,5; 5,3); Р(29,5, 30,4; 36,9), Р (4,4; 16,8; 12,4), ,7; 5; 3,9). Затем вычисляют коэффициенты А, В, С по уравнению плоскости (6). Взаимную ориентацию 3-го и 2-го зубов определяют углом между плоскостями, проведенными через три характерные точки Р, Р, Р,, дня 3-го зуба и И л з для 2-го зуба. До начала лечения -г- 67,22°. В процесо ,,„ ,,в се лечения через три месяца у- - 80,56 . При сравнения результатов измерения зубных рядов до н в процессе лечения отмечено, что расстоя1гае между 5-ым и -iiM зубами уменьшилось после удаления 4-го зуба на 4,26 мм в течении 3 мес., а также изменилась взаимная ориентайня 3-го и 2-го зубов на 13,34°. В настоящее время для контроля коррекция зубного ряда в клиниках в основном прнменяются антропометрические методы исследовани проводимые на моделях. Изобретение обладает cjmjecTseHHbiMH преимуществами перед прототипом, а именно позволяет повысить тошость проводимых измерений, так как при существующем способе расстояние между элементами зубного ряда определяется с точностью 0,5 мм а предлагаемый способ позволяет определять взаимное расположение злементов зубного ряда с точностью 50 мкм и выше; проводить количтетеенную оценку взаимной ориентации эле- . ментов зубного ряда, что невозможно сделать по существующему способу; повысить чувстви тельность проводимых измерений, что, в свою очередь, дает возможность сократить интервалы между контрольными обследованиями, а также своевременно вносить изменения в проводимое ортодонтическое лечение; обеспечить максимальный комфорт пациеита ввиду ртсутствия неприятных ощущений, связанных со снятием слепков; произвольно располагать полость рта пая ента в интерференционном поле, так как предлагаемый метод дает возможность проводить измерения взаимного расположения и взаимной ориентации злементов зубного ряда, а существующий способ позволяет измерять расстояние только относительно некоторой базовой плоскости; определять периоды и зоны активного роста челюстей и перемещения зубов; проводить сравнительные оценки действия различной ортодонтической аппаратуры; сократить срок проводимого лечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения состояния поляризации объектной волны | 1982 |
|
SU1053625A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ДИФФУЗНО ОТРАЖАЮЩИХ ОБЪЕКТОВ | 2005 |
|
RU2289098C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| Способ контроля отклонения формы поверхности детали | 1980 |
|
SU938008A1 |
| Способ записи двухэкспозиционной голографической интерферограммы | 1991 |
|
SU1836622A3 |
| Способ определения рельефа поверхности | 1989 |
|
SU1629749A1 |
| ПОЛЯРИЗАЦИОННЫЙ ИНТЕРФЕРОМЕТР | 2004 |
|
RU2275592C2 |
| Способ измерения аберраций волнового фронта излучения | 1990 |
|
SU1793273A1 |
| Способ контроля отклонения формы поверхности деталей сложной формы | 1982 |
|
SU1065683A1 |
| Способ определения направления перемещения диффузно отражающего объекта | 1988 |
|
SU1659869A1 |
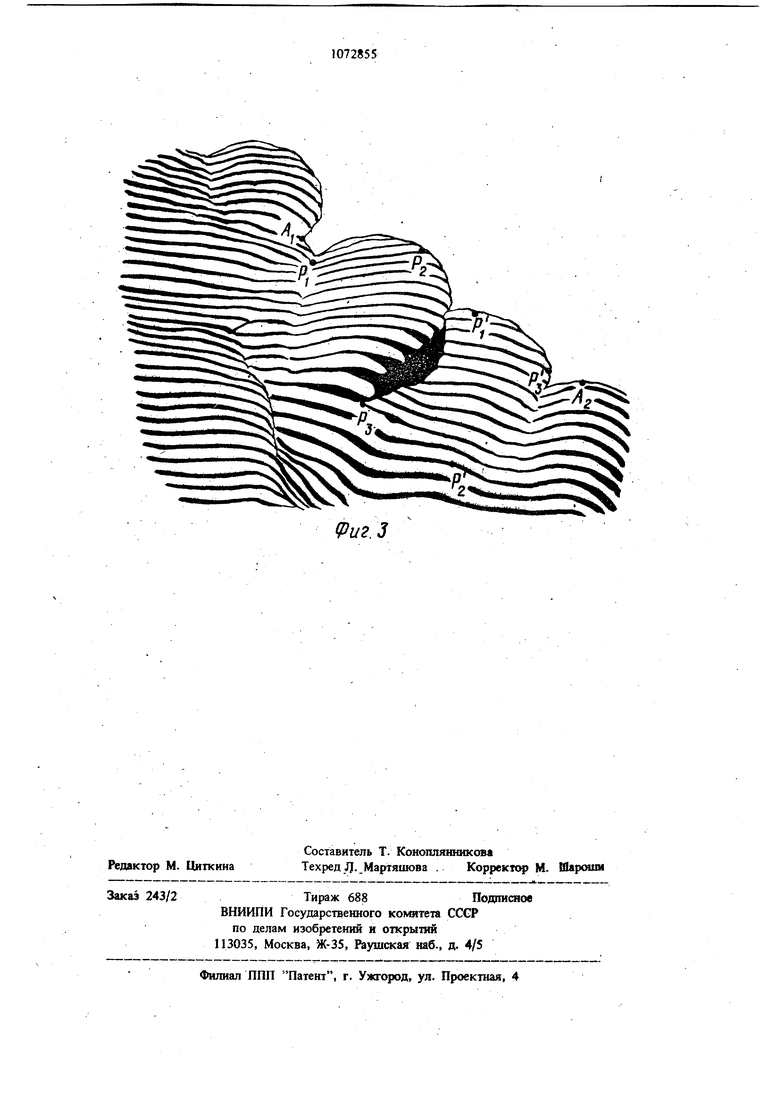
СПОСОБ КОНТРОЛЯ КОРРЕКЦИИ ЗУБНОГО РЯДА, предусматривающий регистрацию контрольных нэо яжжий зубного ряда, сравнение последних меж2 собой и определение степени KojppeKuiffl, отличающийся тем, что, с целью повышения точности, контрольные изображения получают путем формирования на зубном ряду шггерференциониого поля, вое становленного с голограммы с зарегистрированными на ней двумя коллимированнымипучками, а степень коррекции определяют по взаимное му расположению и взаимной ориентации элементов зу&юго ряда в зависимости от простронственной частоты и ориентации интерференционньк полос на контрольных изображениях. Я Г-38
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ужумецкене И | |||
| И | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М., Медицина, 1970,с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Я | |||
| Телерентгенография в ортодонтии | |||
| М | |||
| Медищша, 1976, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
