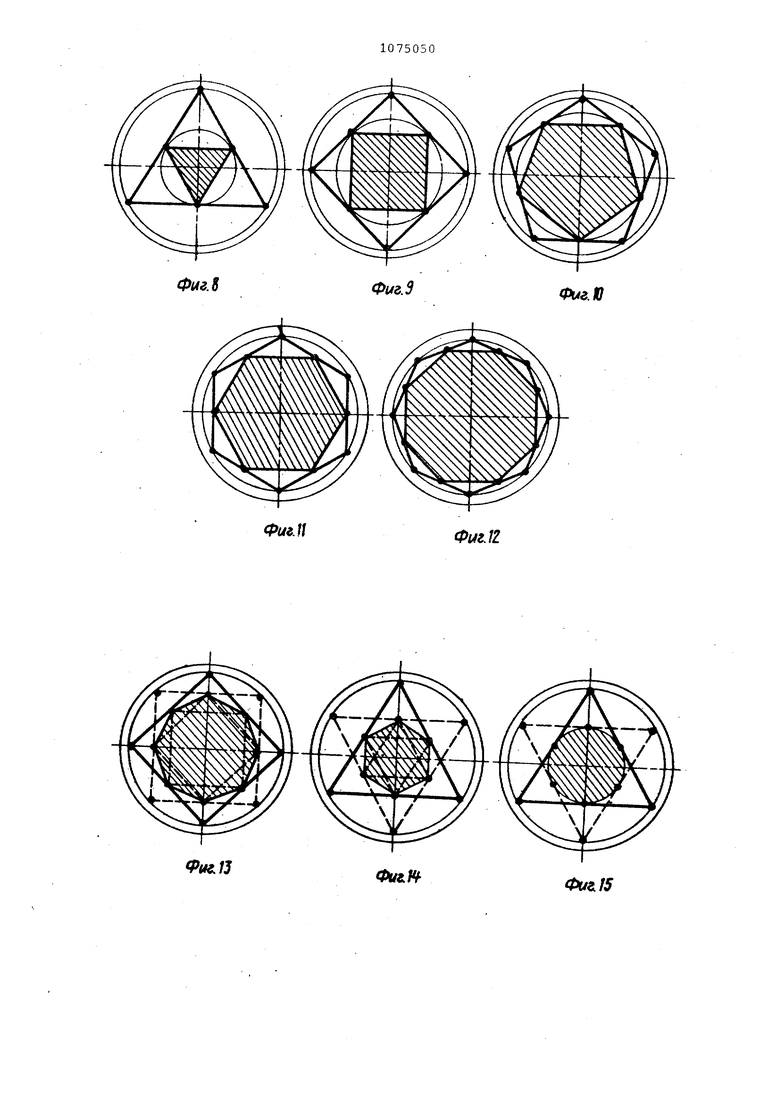
Нзовретение относится к опорным устройствам и может быть нспользО)вано для подвески крупногабаритногр элемента типа цилиндрической оболоч ки из алюминиевых сплавов на стальную башню, проходявчую внутри этого элемента. Известно устройство свободно-неподвижной опоры трубопровода, содержащее жестко укрепленные на осно вании стойки и соединякжфий их ригел на котором установлен вращгиойщйся ролик с кольцевым пазом, а между роликом и трубопроводом установлен башмак с продольным выступом на ниж ней горизонтальной поверхности, при чем выступ входит в паз ролика. Это устройство обеспечивает развязку продольных температурных расширений трубопровода относительно основания Г. Однако устройство не может быть использовано для подвески крупногабаритного элемента в виде цилиндрической оболочки, так как оно не с держит технических средств для этого. Наиболее близким к изобретению является устройство для подвески крупногабаритного элемента, содержащее смонтированные на основании неподвижную опору и подвижные опоры. Неподвижная анкерная опора выполнена в виде монолитного бетонного блока, обеспечивакяцего восприятие п одольных и поперечных сил от веса трубопровода. Каждая подвиж ная опора выполнена в виде кольцевой обоймы, охватывакядей сечение трубопровода, а также бетонного фун дамента и двух катков с горизонталь ными осями, расположенных между фун даментом и опорными площадка1 Ф1 коль цевой обоймы. Подвижная опора воспр нимает составляющее от силы тяжести, а также обеспечивает возможност продольного перемещения данного сечения трубопровода при его температурном расширении 2 . Недостатком известного устройства является невозможность устранения температурных деформаций при подвеске крупногабаритного алюминие вого элемента типа цилиндрической оболочки на стальную башню, так как оно не содержит технических средств для многоточечного опирания в поiперечных сечениях и обеспечения тем пературной развязки в этих сечениях. Целью изобретения является устранение температурных деформаций при подвеске крупногабаритного эле мента типа цилиндрической оболочки на стальное вертикальное основание Поставленная цель достигается тем, что в устройстве для подвески крупногабаритного элемента, содержащем смонтированные на основании неподвижную опору ,и подвижные опоры, неподвижная опора расположена у верхнего торца элемента и выполнена из нескольких горизонтальных рамок и равных им по числу алюминиевых наклонных стержней, при этом каждая рамка выполнена из двух алюминиевых стержней, шарнирно закрепленных одними концами в одной из опорных точек элемента и другими концами - на основании в точках касания лучей, проведенных из опорной точки элемента к окружности, описан ной вокруг поперечного сечения основания, а каждый алюминиевый наклонный стержень расположен в вертикальной осевой плоскости и шарнирно соединен с опорной точкой элемента и с основанием, каждая подвижная опора расположена горизонтально и выполнена из нескольких алюминиевых стержневых рамок, идентичных по конфигурации и креплению рамкам неподвижной опоры, при этом длина алюминиевого горизонтального стержня неподвижной и подвижных опор и длина каждого алюминиевого наклонного стержня неподвижной опоры определены из соотношений длина горизонтального алюминиевого стержня/ внутренний радиус элемента типа цилиндрической оболочки;радиус окружности, описанной вокруг поперечного сечения основания; BU.- длина наклонного алюминиевого стержня; расстояние от опорной точки элемента до вертикальной линии, проходящей через точку крепления наклонного стержня к основанию. На фиг. 1 показано устройство, общий вид; на фиг. 2 - то же, разрез, на г. 3 - Б на фиг. 2; на фяг, 4 - сечение В-В на фиг. 2;на фиг 5 - стержневая рамка и наклонный стержень неподвижной опоры на фиг, 6 - схема деформаций в горизонтальном сечении} на фиг. 7 - схема вертикального перемещения точек элемента, на фиг. 8 - пример подвески элемента на треугольное вертикальное основание (3точки крепления); на фиг. 9 - подвеска элемента на квадратное вертикальное основание (4 точки крепления), на ijMr. 10 подвеска элемента на пятиугольное вертикальное основание (5 точек креп
ления); на фиг, 11 - подвеска элемента на шестиугольное основание на 6 точек; на фиг. 12 - подвеска элемента на восьмиугольное основание на 8 точек; на фиг. 13 - подвес ка элемента на 8 точек на восьмиугольное основание с уменьшенным поперечным сечением (с перекрещивающимися рамками в двух горизонтальныХ плоскостях) на фиг. 14 - подвеска элемента на 6 точек на шестиугольное основание с уменьшенным сечением (с перекрещивающимися рамками в двух горизонтальных плоскостях); на.фиг. 15 - подвеска элемента на б точек на круглое уменьшенное основание (рамки расположены в двух горизонтальных плоскостях), на фиг. 16 - пространственная схема расположения перекрещивающихся рамок в горизонтальных плоскостях; на фиг. 17 - схема построения рамки при круглом сечении основания с любым диаметром.
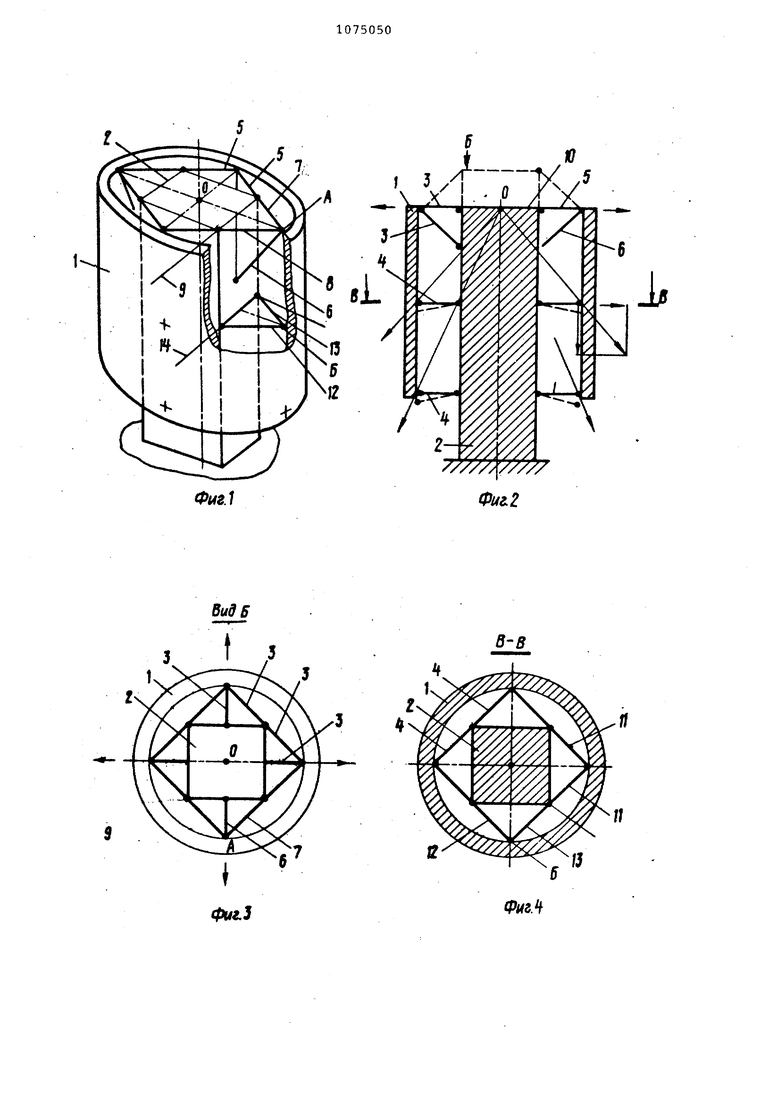
Устройство для подвески алюминиевого крупногабаритного элемента 1 типа цилиндрической оболочки на стальное вертикальное основание 2 (фиг. 1-4) содержит неподвижную опору 3, установленную у верхнего торца элемента 1 и несколько подвижных опор 4, равномерно установленных по высоте элемента 1. Их число произвольно и определяется в каждом конкретном случае.
Неподвижная, опора 3 состоит из нескольких рамок 5 (на фиг. 1 и 3 показано четыре рамки 5) и соответсвующего числа наклонных стержней б. Каждая рамка 5 лежит в горизонтальной плоскости и выполнена из двух алюминиевых стержней 7 и 8, которые одними концами шарнирно закреплены Е опорной точке элемента 1, например, в точке А, а другими концами шарнирно закреплены на основании 2.
Стержневая рама 5 может поворачиваться относительно горизонтальной линии 9, проходящей через точки крепления стержней 7 и 8 к основанию 2. Наклонный стержень б выполне из алюминиевых сплавов и шарнирно закреплен в опорной точке А элемента 1 и на основании 2. Стержень 6 может быть расположен снизу, как показано на фиг. 1, 2 и работать на сжатие от действия весовой нагрузки, но может быть расположен сверху как показано налфиг. 2 пунктиром, В последнем случае стержень б работает на растяжение от весовой нагрузки от элемента 1, но высота основания 2 должна быть больше, чем экономически нецелесообразно.
Неподвижная опора 3 обеспечивает расположение верхнего торца элемента 1 в неподвижной горизонтальной
плоскости 10 при изменении температуры, неподвижность центральной точки О элемента 1, которая совпадает с центром основания 2, а также обеспечивает свободу температурного рас5 ширения алюминиевого элемента 1 -по радиальным направлениям, как показано стрелками на фиг. 3. Одновременно неподвижная опора 3 обеспечивает многоточечное опирание элемента 1 в го10 ризонтапьном сечении и фиксированное закрегУпение элемента 1, что не-. обходимо при воздействии боковых нагрузок от ветра.
Каждая подвижная опора 4 располо5 жена в горизонтальном сечении конструкции и состоит из нескольких рамок 11, каждая из которых состоит из двух алюминиевых стержней 12 и 13, .одними концами .шарнирно закрепленных
0 на элементе 1 в опорной точке Б, а другими концами шарнирно закрепленных на основании 2. Рамка 11 может быть повернута вокруг линии 14, проходящей через точки опирания стерж5 ней 12 и 13 на основание 2 (фиг. 1, 2, 4). По своей конструкции рамки 11 идентичны рамкам 5 неподвижной опоры 3. Подвижные опоры 4 обеспечивают свободу температурного расширения i,
Q элемента 1 в вертикальном направлении за счет небольшого поворота ра- . мок 11 при вертикальном смещении опорных точек Б элемента 1, как показано пунктиром на фиг. 1, а также обеспечивает возможность температурного расширения элемента 1 и фиксированного многоточечного его закрепления на основании 2.
Устройство для подвески крупногабаритного элемента типа круговой
0 цилиндрической оболочки на вертикальное основание обеспечивает фиксированную многоточечную в вертикальном и горизонтальном направлениях подвеску, обеспечивает развязку темпе5 ратурных расширений конструктивных элементов и надежное восприятие всех нагрузок от веса ветра, монтажных нагрузок и т.д.
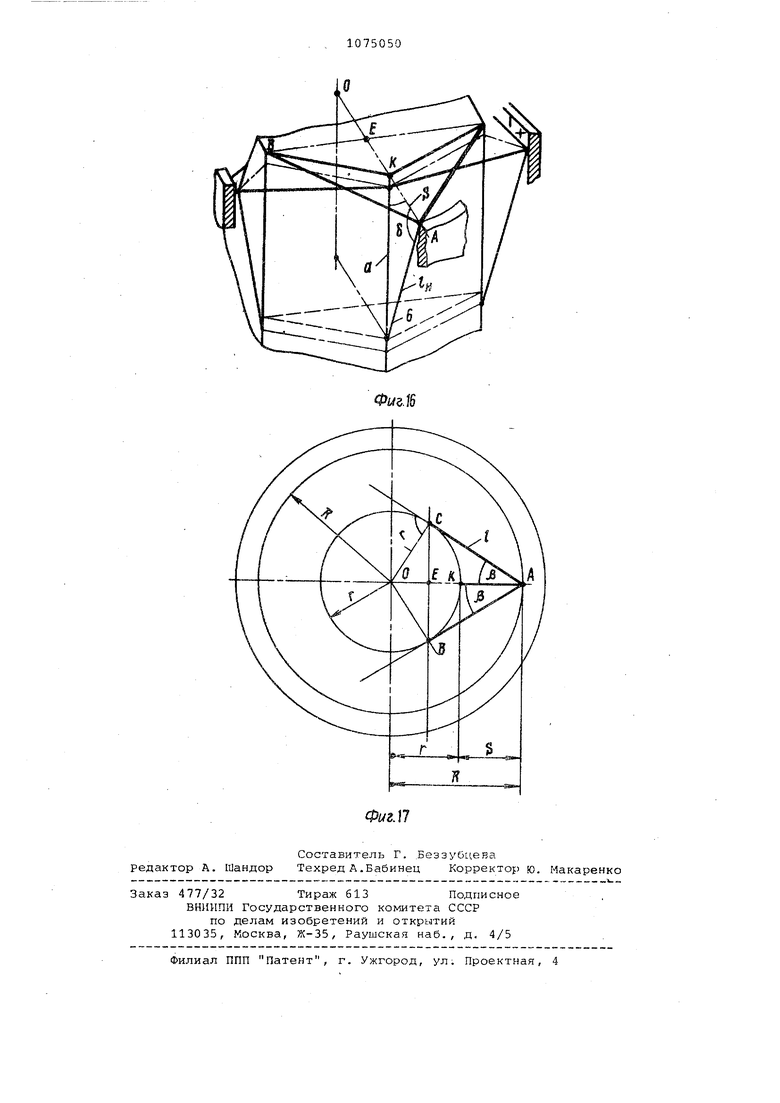
На фиг. 5 представлена часть не0 подвижной опоры 3, включающая горизонтальную рамку из стержней 7, 8 и наклонный стержень б, соединенные с опорной точкой А элемента 1 и закрепленные на основании 2 в точ5 ках Bf С, Д. Линия ОА является внутренним радиусом элемента 1 и она . перпендикулярна вертикальной плоскости вед-грани основания 2. На фиг. 6 представлена схема деформа ций основания 2, элемента 1 и рамки САБ при повышении температуры (вид сверху).
Для упрощения обозначено ОЕ h ЕА Н, ОА R ЕС а . При нагреве 5 на IS t° все точки конструкции в поперечном сечении фиг. 6 будут смещаться по радиальным направлениям от.неподвижной точки О, причем эти смещения пропорциональны расстоянию до неподвижной точки О, вели.чине -ь t и коэффициенту температурного расширения стали (обе 11X10° ) или алюминиевых сплавов ( -22X10 ). Точки А, В, С/ Е переместятся соответственно в точки А, Уравнение отрезков вдоль линии ОЛ после нагрева на & t имеет вид R + R h + U h + Е А (1) Очевидно, К R Л t. о(.а. bh h-it°x 15 X оСс , а ЕА a(bt°.uic+l)- Первоиачальная длина стержня АС ВА I а2 + , а длина стержня после нагрева равна л Cj t(l + + ut°e,q ).4аТ+П, Из прямоуголь- 20 ного треугчэльника
t4HW 4a 4tUbt°.otaf(.to.cLc)
Подставив найденные значения лР, дь и
ЕА в (1).:
R+R-bt°.«ta b4-hM:°.6tc-t-1 ..(.o.i
или R + Rit°(iia-h-h-ut°-cto i(fi-t.ota 2 Q+H2)-(a + aAi.(ic)2 Возведя в квадрат левую и правую части равенства (R -. R . ut. Ota - h - h- .fltc )2 (1 . oCa ). (a + H) - (a + a- At°.oLc ) раскрыв скобки it°- Лд - 2Rh - 2 Rh b.t° . R+ 2R + R /rbt°- flJa )- 2Rh.... Rh ( ut°. otg.t° . Ло ) 4--h2 + 2h27( Xut,oCc+ h( ut. oto } + 2a. ut°. o(, 2H - it° + a. ( &t x &t. ocq )2 - a2 - 2aAtC Otc - . OCc )2. Приведя подобные члены a и исключив члены второго порядка малости , содержащие квгщраты или произведения сСс и R 7R -ul°-ota-2RVi-2Rh-&i°-()tc-2Rh-ut. йt°.otc .o+2H ftt a-2a лl°«c12;1075 5
r(R - h) hH
:R - ri)
. Н и 2Rh+h
(так как
н2
получено выражение
J a-hH 06o.h/H a (O oj-Odc )
ИЛИ
h.H (oiq-etc) a()
if)
Тогда а -ЛтЬГ, 35 50 55 60 65 50 заменив R--2Rh -r H2 получено выражение 2R.At°-aQ-2RVi.b-l°otc-2RVi-tl°(tat2h.bt-(itcv 2a2.bt°.ot,a 2H- t-oia2a ut°-oi,c Ф Производимсокращение на 2 . .д t° , что свидетельствует о независимости уравнения (3) от величины it, т.е. о работоспособности конструкции при любой температуре. - - Rh - + - а; или dig (к - Rh - Н ) - oi (Rh - h и заменив 2 ,2 - Rh - Н Rh - h Полученное расчетное выражение (4) свидетельствует о том, что угол ОСА прямой и треугольник ОСА является прямоугольным так, как отрезок СЕ является высотой треугольника ОСА, опущенного на гипотенузу ОА из вершины прямого угла ОСА. Таким образом отрезок ОС является радиусом окружности, описанной вокруг многогранного сечения стального основания или радиусом круглого сечения этого основания. Длина горизонтальных алюминиевых стержней 7 и 8 (фиг. 17) определяется построением касательных линий) проведенных из опорной точки А к окружности поперечного сечения стального основания 2. Если заданы внутренний радиус R алюминиевого элемента 1 и наружный радиус г (или радиус описанной окружности ) стального основания 2, то расчетная длина . горизонтального стержня 6, 7, 12, 13 определяется из треугольника ОСА (фиг, 17) : Угол leждy линией ОА и горизонтальным стержнем.определяется из треугольника ОСА по выражению если стержни б, 7, 8 (фиг. 5) опираются на одну вертикальную плоскость ВСД, то стержень б, должен быть равным .по длине Стержням 7 и 8, а угол наклонаS должен быть равен углу (5 , так как работа стержня б идентична работе стержней 7 и 8 при обеспечении радиального перемещения точки А. Если стержень б прикреплен к основанию в точке, не лежащей в вертикаль ной плоскости, проходящей через точ ки крепления стержней 7 и 8 к осно ванию 2, то талина наклонного стержня б и угол 8 его наклона будут дру гими и определяются с учетом расстояния АК (фиг. 17). Так как отрезок АК является проекцией наклонного стержнд б на.-горизонтальную плос кость и его величина равна S R то подставив в (4) вместо Н значение S R - г а вместо h значение г получим вертикальную прО екцию наклонного стержня б а, «ЧгСк-гУ а длина наклонного стержня будет ра на ),-r 4R(. R Угол наклона стержня б к радиусу ОА определится из фиг. 16 по выражению fKR с Л Оби:;им для двух случаев крепления наклонного стержня б нд основание 2 будет следующее выражение для его ДЛИНЫ 6ц / где S расстояние от опорной точки элемента 1 до вертикальной линии, проходящей через точ ку крепления наклонного стержня б к основанию 2. В первом случае, ког да стержень б закреплен как и стержень 7 и 8 на вертикальной плоскоети вед (фиг. 5 и б) величина S R - h, а во втором случае, когда стержень б закреплен вне вертикальной плоскости, проходящей через точки ВС (фиг. 16) величина S R-r На фиг. 8-12 представлены примеры расположения стержней 7 и 8 горизонтальных рамок, когда сечение основания 2 является правильным Jмногоугольником, а на каждой грани основания закреплены гори зон тешь ные и наклонные стержни. На фиг. 13 и 14 представлены варианты двухярус ного расположения рамок в близко расположенных плоскостях (как показано на фиг. 16). Это позволяет при заданном числе опорных точек элементы 1 уменьшить размер сечения основания 2. На фиг. 15 дан пример круглого сечения основания 2. На фиг. 15 дан пример круглого сечения основания 2 и двухярусного расположения горизонтальных рамок. Пример расчета. Дано R 10 мм, радиус описанной окружности квгщратного сечения основания равен г 5 м (фиг. 9). Определить длины стержней и углы их наклона, если наклонные стержни закреплены на тех же гранях основания, что и горизонтальные стержни. Определяем длину наклонного и гори зонтальйых стержней по формуле (5.) г гц sf7r 5 8,бб м Углы наклона стержней определены по формуле J 0.5-,pS.90° Пример расчета. Дано R 10 м, радиус круглого сечения основания г 5 м. Определить длины и углы наклона горизонтальных и наклонных стержней. 1г -Jl, 5 8,бб м .5-,р 30° EH SR(R-r).(10-5) .OTw. Sin 8 . O.TOT S 45° Как показано выше, радиус поперечного сечения основания может быть любым, он выбирается в соответствии с действующими на основание нагрузками. Предложенное устройство подвески элемента не налагает ограничений на размер поперечного сечения основания, так как при любом размере предложенное устройство подвески обеспечивает автоматическое слежение и обеспечение температурной развязки при многоточечном опирании цилиндрического элемента. При температурном расширении элемента 1 его нижний конец перемещается по вертикали. Свободу вертикальных перемещений обеспечивают подвижные опоры 4, гхэризонтальные стержни 12 и 13, составляющие треугольные рамки 11, поворачиваются вокруг горизонтальной линии на небрльшой угол Она фиг. 2 показано пунктиром отклоненное положение рамок). На фиг. 7 дана схема поворота рамки с высотой Н вокруг горизонтальной линии на угол у . Определим величину угла у и величину проседания b опорной точки М. Величина перемещения по вертикали точки М при перепаде температуjMd на t° будет равна аР Р- Tit(ota- «-с ) , где Р - расстояние от точки М до верхверхнего края элемента. Угол наклона горизонтальной рамки с высотой Н б дет определен из соотношения Sin -ДР/Н Примем в качестве примера, Р 50м Н 5 м, .At 50°, (Oia-ctc) Тогда йР 50000К50М1Х10 2 7 , 5 . r-i o-°°s5ro 8 Проседание точки М будет равно b Н(1 - cos 500 X(1-0,99994) 500x0,00006 0,03 мм Столь незначительное проседание равное сотым долям миллиметра, не повлияет на форму элемента, а.очен малые углы поворота рамок позволяю от шарнирных узлов крепления стерж ней к основанию и к элементу перей ти к жесткому их закреплению. Монтаж элемента 1 на основание 2 осуществляют следующим порядком. На основание 2 закрепляют стержни неподвижной опоры 3, затем закрепляют к ним верхний ряд панелей, из которых составлен крупногабаритный элемент, устанавливают.первую подвижную опору на основание 2 и на нижний край верхнего ряда панелей. Затем к верхнему ряду панелей подвешивают панели среднего кольцевого ряда панелей и устанавливают нижнюю подвижную опору. Если число рядов панелей больше, то-аналогичная последовательность операций продолжается. Общественно-полезная эффективность изобретения заключается, по сравнению с прототипом, в обеспече нии возможности подвески крупногабаритных элементов типа цилиндрИческой оболочки, выполненной из алюминиевых сплавов, на вертикальное основание, выполненное из стали. Кроме того, обеспечение многоточечного и фиксированного закрепление позволяет снизить прочностные и жесткостные требования к конструкции элемента 1, снизить его вес и стоимость изготовления за счет применения меньших строительных высот, более экономичных профилей и. т.п. Экономический эффект от использования изобретения можно определить следующим образом. Многоточечное опирание алюминиевого элемента можно выполнить и на алюминиевое основание, так как при этом вопрос об обеспечении свободы температурных расширений автоматически решается,) так как нет разницы в коэффициентах температурного расширения материалов основания и элемента. Поэтому эконоглический эффект от использования изобретения можно оценить как разность между стоимостью алюминиевого и и стального основания одинаковых размеров. Стальное основание высотой 70 м и диаметром 10 м. весит примерно 240 тонн. Стоимость изготовленных и смонтированных стальконструкций - 450 руб/т. Аналогичное по прочности и жесткости алюминиевое основание весит 180 тонн, но стоимость одной тонны конструкций значительно выше .2 тыс., руб, Экономический эффект равен: 180x2000 - 240X450 360 т.р. -108 т.р. 252 р. ////// //7/7 014г. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подвески крупногабаритного элемента | 1982 |
|
SU1075051A1 |
| Устройство для многоточечной подвески крупногабаритного элемента | 1985 |
|
SU1315715A1 |
| Устройство для подвески длинномерного элемента на вертикальное основание | 1985 |
|
SU1335774A1 |
| Устройство для подвески крупногабаритного элемента | 1986 |
|
SU1413350A1 |
| Опора для размещения модулей | 1985 |
|
SU1277946A1 |
| Опора для крепления модулей технологического оборудования | 1987 |
|
SU1520294A1 |
| Опора для размещения модулей технологического оборудования | 1986 |
|
SU1395892A1 |
| Опорное сооружение | 1985 |
|
SU1300098A1 |
| Устройство для крепления удлиненной платформы на основании,выполненном из материала с коэффициентом теплового расширения,отличным от коэффициента теплового расширения материала платформы | 1982 |
|
SU1074984A1 |
| Автоматическая транспортная тележка | 1986 |
|
SU1458203A1 |

УСТРОЙСТВО ДЛЯ ПОДВЕСКИ КРУПНОГАБАРИТНОГО ЭЛЕМЕНТА, содержащее смонтированные на основании неподвижную опору и подвижные опоры, отличающееся тем, что, с целью устранения температурных деформаций при подвеске крупногабаритного алюминиевого элемента типа цилиндрической оболочки на стальное вертикальное основание, неподвижная опора расположена у верхнего торца элемента и выполнена из нескольких горизонтальных рамок и равных им по числу алюминиевых наклонных стержней, при этом каждая рамка выполнена лз двух алюминиевых стержней ,шарнирг о закрепленных одними кокцами в здной из опорных точек элемента и другими концами - на основании в точках касания лучей, проведенных из эпорной точки элемента к окружности, описанной вокруг поперечного сечения основания, а каждый алюминиевый наклонный стержень распс :ожен в вертикальной осевой плоскости и . шарнирно соединен с опорной точкой элемента и с основанием, каждая подвижная опора расположена горизонтально и выполнена из, нескольких алюминиевых стержневых рамок, идентичных по конфигурации и креплению рамкам неподвижной опоры, при этом длина алюминиевого горизонтального стержня неподвижной и подвижных опор и длина алюминиевого наклонного стержня неподвижной опоры определены из соотношений ,, W С где ЕГ R длина горизонтального алюминиевого стержня; внутренний радиус элемента типа цилиндрической оболочки) Г радиус окружности, описанной вокруг поперечного сечения основания, е, длина наклонного алюминие вого стержня} ел S расстояние от опорной точки элемента до вертикальО СП ной линии, проходящей через точку крепления наклонного стержня к основанию.
В-в
и
13
ФиъМ
I
Ф14г.8
Фиг.З
Фиг.П
ФигМ
Ф14г.1г
Фиг. 13
Фиг.ЩФиг. 15
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Свободно-подвижная опора трубопровода | 1976 |
|
SU568780A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Металлические конструкции | |||
| Под ред | |||
| Н.С | |||
| Стрелецкого, Стройиэдат, М | |||
| , 1961, с | |||
| Пароперегреватель для водотрубного котла судового типа | 1925 |
|
SU696A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
