Изобретение относится к строительству и может быть использовано при возведении опорных сооружений из металлоконструкций для модулей с технологическим оборудованием.
Цель изобретения - повышение стабильности расстояний между модулями при изменении температуры воздуха и обеспечение возможности смены модулей снизу,
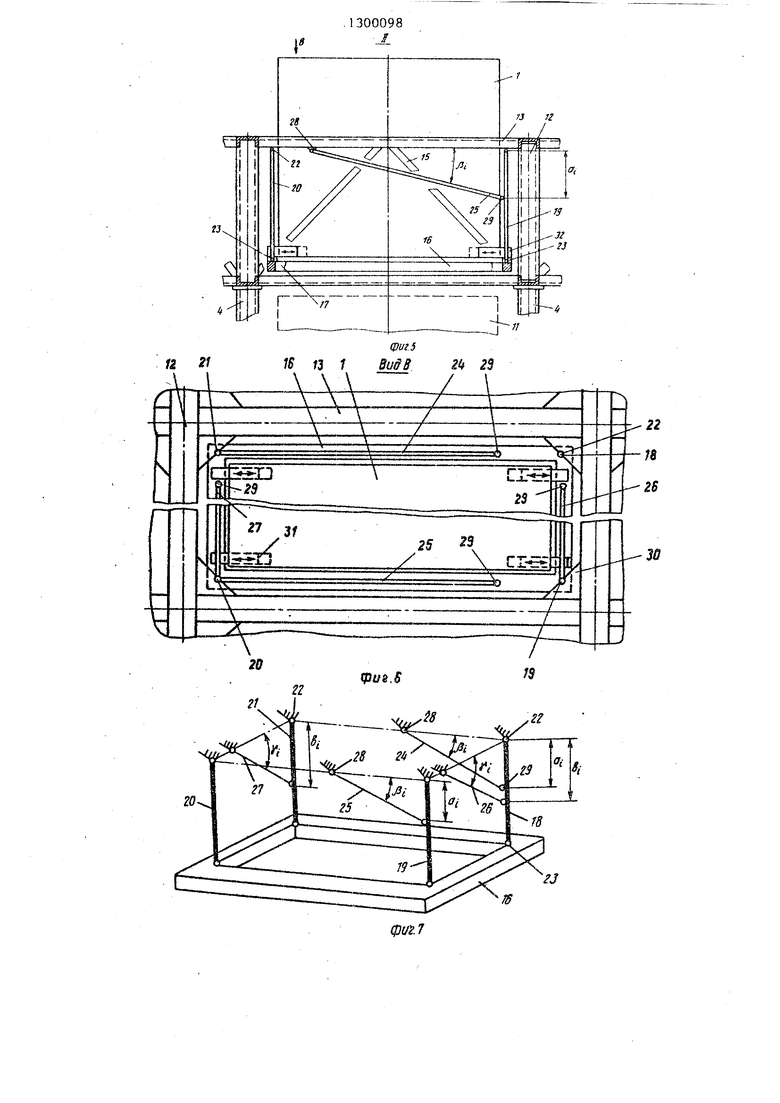
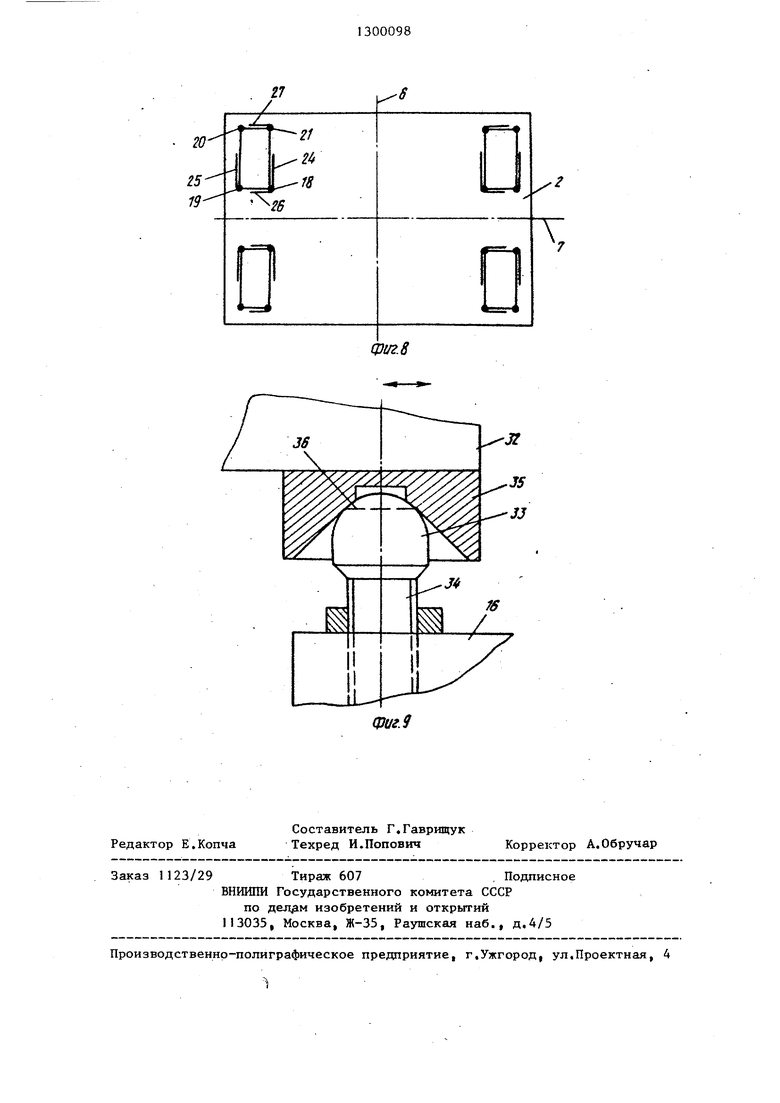
На фиг. J изображено опорное сооружение,вид в планеJ на фиг1 2 - разрез А-А на фиг.1; на фиг. 3 - разрез Б-Б на фиг.1; на фиг. 4 - узел на фиг.2; на фиг.5 - узел 1 на фиг.3; на фиг. 6 - вид В на фиг.5; на фиг. 7 - рама с подвесками и нак- лоннь ш стержнями, обвций вид; на 4мг. 8 - расположение наклонных стержней, вид в плане; на фиг. 9 - узел крепления модуля к раме,
Опорное сооружение для модулей 1 содержит горизонтально расположенный стальной каркас 2 со сквозными вер- тикальны1«а1 ячейками 3 для размещения модулей t, вертикальные стальные стойки 4 и блоки 5 фундамента, размещенные в узлах прямоугольной координатной сетки в соответствии с расположением модулей « На фиг. 1,2 и 3 приведен пример опорного сооружения для устройства с 32-мя модулями 1, размещенными по четырем строкам и восьми столбцам. Стальной каркас 2 выполнен в виде цельной пространст- аенной рамно-ферменной конструкции, собранной при строительстве-из отдельных элементов с помощью болтовых и сварных соединений. Каркас 2 представляет собой в плане прямоугольник с продольной плоскостью 6 симметрии и с поперечной плоскостью
7симметрии, которые пересекаются
8точке Г. По контуру прямоугольного в плане каркаса 2 вьшолнены площадки 8 техобслуживания. Каркас 2 установлен на систему вертикальных стальных стоек 4, которые -закреплены верхними концами на узлах каркаса
2, а нижними жестко закреплены на блоках 5. Система вертикалыв х стоек 4 образует несколько продольных рядов (например девять рядов) и несколько поперечных рядов (например пять рядов). Под каждой строкой модулей 1 расположен рельсовый путь 9 дпя проезда манипулятора 10 со сменным модулем 11. Высота стоек 4 опре
5
0
5
делена с учетом высоты модуля I и высоты подъемной площадки манипулятора 10,
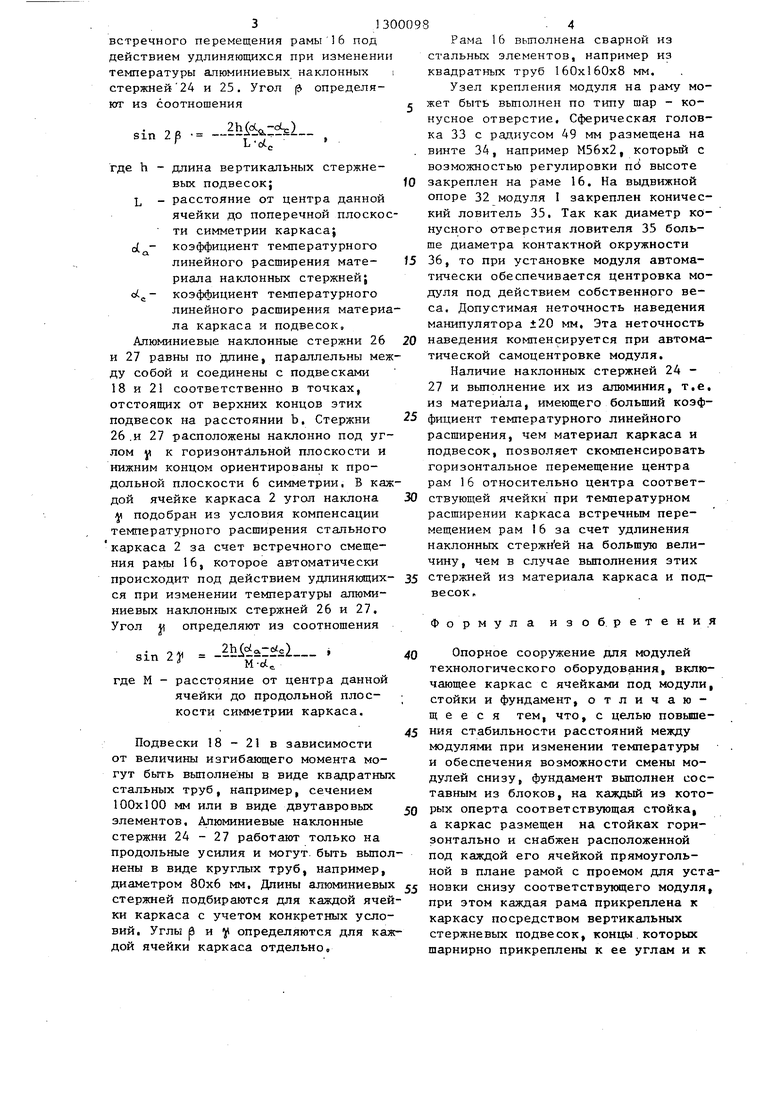
Стальной каркас 2 выполнен из плоских поперечных 12 и плоских продольных 13 ферм, которые, пересекаясь, образуют решетчатую конструкцию с вертикальными сквозными отверстиями - ячейками 3 для размещения в них модулей 1. Каждая плоская ферма 12 и 13 состоит из верхнего и нижнего поясов, вертикальных элементов 14 в линиях пересечения ферм 12 и 13 и раскосов 15.
В каждой ячейке 3 расположена рама 16 с приемом 17 для прохода модуля 1 снизу при его установке на раму 16. Последняя подвешена на каркас 2 с помощью четырех стальных вертикальных стержневых подвесок 18.- 2, выполненных с равной длиной hi
Каждая подвеска 18 - 21 с помощью шарнира 22 подвешена верхним концом на каркасе 2, а нижним концом с помощью шарнира 23 закреплена на соответствующем углу рамы 16, В вертикальных плоскостях, проведенных через пары подвесок 18 - 21, расположены алюминиевые наклонные стержни 24 - 27, каждьй из которых верхним концом с помощ1 ю шарнира 28 закреплен на каркасе 2, а нижним концом с помощью шарнира 29 закреплен на одной из подвесок 18 - 21.
35
Рама 16 размещена в ячейке 3 с зазорами со всех сторон с возможностью ее компенсационного перемещения в горизонтальной плоскости. Шарниры 22
40 и 28 закреплены на каркасе 2 с помощью кронштейнов 30 и 31. Модуль 1 закреплен на раме 16 с помощью выдвижных опор 32, которые выдвигаются из модуля 1 после подъема модуля 1
45 на расчетную высоту и опираются сверху на раму 16. Алюминиевые наклонные стержни 24 и 25 равны между собой по длине, параллельны и соединены с подвесками 1В и 19 соответственно
50 в точках, отстоящих на расстоянии а от верхнего конца подвески. Стержни 24 и 25 расположены наклонно под углом р к горизонтальной плоскости и нижним концом ориентированы к по55 перечной плоскости 7 симметрии каркаса 2, В каждой ячейке каркаса 2 угол наклона р подобран из условия автоматической компенсации температурного расширения каркаса 2 за счет
встречного перемещения рамы 16 под действием удлиняющихся при изменении температуры алюминиевых наклонных i стержней 24 и 25. Угол определяют из соотношения
. „ „ 2h(c(.,.-оЦ.) sin 2В ..-
Ь Лс
- длина вертикальных стержневых подвесок;fO - расстояние от центра данной
ячейки до поперечной плоскос- ти симметрии каркаса;
оС - коэффициент температурного
линейного расширения материала наклонных стержнейJ оС - коэффициент температурного
линейного расширения материала каркаса и подвесок. Алюминиевые наклонные стержни 26 и 27 равны по длине, параллельны между собой и соединены с подвесками 18 и 21 соответственно в точках, отстоящих от верхних концов этих подвесок на расстоянии Ь. Стержни 26 .и 27 расположены наклонно под углом у к горизонтальной плоскости и нижним концом ориентированы к продольной плоскости 6 симметрии, В каждой ячейке каркаса 2 угол наклона ff подобран из условия компенсации температурного расширения стального каркаса 2 за счет встречного смещения рамы 16, которое автоматически происходит под действием удлинякщих- ся при изменении температуры алюминиевых наклонных стержней 26 и 27. Угол W определяют из соотношения
sin 2)1 -2Mla l.
M-ot
где М - расстояние от центра данной ячейки до продольной плоскости симметрии каркаса.
Подвески 18-21 в зависимости от величины изгибающего момента могут быть выполнены в виде квадратных стальных труб, например, сечением 100x100 мм или в виде двутавровых элементов. Алюминиевые наклонные стержни 24-27 работают только на продольные усилия и могут, быть выполнены в виде круглых труб, например, диаметром 80x6 мм. Длины алюминиевых стержней подбираются для каждой ячейки каркаса с учетом конкретных условий. Углы р и у определяются для каждой ячейки каркаса отдельно.
5
0 5 0 5
0
5
п
Рама 16 выполнена сварной из стальных элементов, например из квадратных труб 160x160x8 мм.
Узел крепления модуля на раму может быть вьтолнен по типу шар - конусное отверстие. Сферическая головка 33 с радиусом 49 мм размещена на винте 34, например М56х2, который с возможностью регулировки пб высоте закреплен на раме 16. На выдвижной опоре 32 модуля I закреплен конический ловитель 35, Так как диаметр конусного отверстия ловителя 35 больше диаметра контактной окружности 36, то при установке модуля автоматически обеспечивается центровка модуля под действием собственного веса. Допустимая неточность наведения манипулятора ±20 мм. Эта неточность наведения компенсируется при автоматической самоцентровке модуля.
Наличие наклонных стержней 24 - 27 и вьтолнение их из алюминия, т,е, из материала, имеющего больший коэффициент температурного линейного расширения, чем материал каркаса и подвесок, позволяет скомпенсировать горизонтальное перемещение центра рам 16 относительно центра соответствующей ячейки при температурном расширении каркаса встречным перемещением рам 16 за счет удлинения наклонных стержн ей на большую величину, чем в случае выполнения этих стержней из материала каркаса и подвесок.
Формула изоб. ретения
Опорное сооружение для модулей технологического оборудования, включающее каркас с ячейками под модули, стойки и фундамент, отличающееся тем, что, с целью повьвпе- ния стабильности расстояний между МОДУЛЯ1-Ш при изменении температуры и обеспечения возможности смены модулей снизу, фундамент выполнен составным из блоков, на каждый из которых оперта соответствующая стойка, а каркас размещен на стойках горизонтально и снабжен расположенной под каждой его ячейкой прямоугольной в плане рамой с проемом для установки снизу соответствующего модуля, при этом каждая рама прикреплена к каркасу посредством вертикальных стержневых подвесок, концы.которых шарнирно прикреплены к ее углам и к
13
каркасу, и двух пар поперечных и продольных наклонных стержней, причем наклонные стержни в каждой паре выполнены одинаковой длины, их нижние концы шарнирно прикреплены к парам стержневых подвесок, близлежащих соответственно к продольной и поперечной оси сооружения, а верхние концы юарнирно прикреплены к каркасу, причем наклонные стержни вьшолнены из материала, коэффициент температурного линейного расширения которого превьшает коэффициент температурного линейного расширения материала каркаса и подвесок, а угол наклона к горизонтали продольных и поперечных наклонных стержней определяется из соотношения
sin 2
)- L-d
20
.,
Т
т
фиг.1
угол наклона к горизонтали продольных стержней; длина вертикальных стержневых подвесок;
расстояние от центра данной ячейки до поперечной плоскости симметрии каркаса; коэффициент температурного линейного расширения материала наклонных стержней; коэффициент температурного линейного расширения материала каркаса и подвесок.
sin 2J1
2h loia2 s.)
M-ci.
1 - угол наклона к горизонтали поперечных стержней; М - расстояние от центра данной Ячейки до продольной плоскости симметрии каркаса.
Т
1300098
/Й-А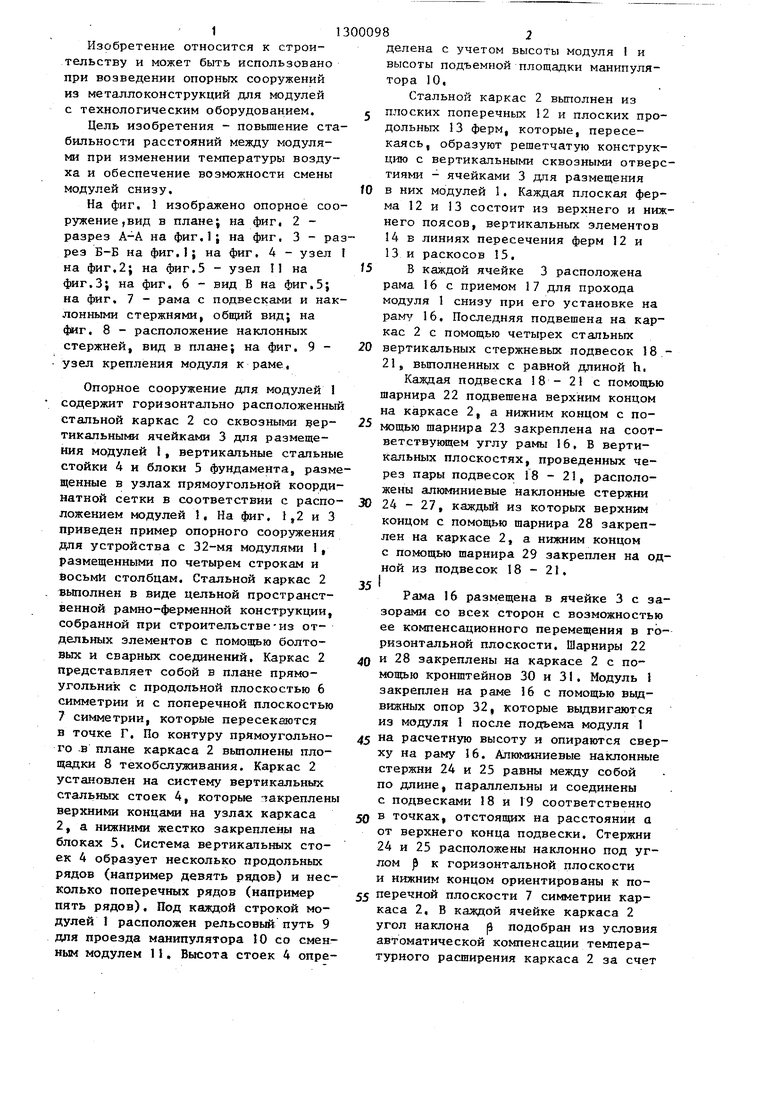
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора для размещения модулей | 1985 |
|
SU1277946A1 |
| Устройство для подвески крупногабаритного элемента | 1982 |
|
SU1075050A1 |
| Устройство для подвески крупногабаритного элемента | 1982 |
|
SU1075051A1 |
| Устройство для подвески крупногабаритного элемента | 1986 |
|
SU1413350A1 |
| Опора для размещения модулей технологического оборудования | 1986 |
|
SU1395892A1 |
| Устройство для многоточечной подвески крупногабаритного элемента | 1985 |
|
SU1315715A1 |
| Самоходная транспортировочная тележка | 2023 |
|
RU2822028C1 |
| Опора для крепления модулей технологического оборудования | 1987 |
|
SU1520294A1 |
| Устройство для подвески длинномерного элемента на вертикальное основание | 1985 |
|
SU1335774A1 |
| Зеркальная антенна | 1985 |
|
SU1319121A1 |
Изобретение относится к выведению опорных сооружений из металлоконструкций для модулей с технологическим оборудованием и позволяет повысить стабильность расстояний между модулями при изменении температуры воздуха и обеспечить возможность смены модулей снизу. Сооружение содержит горизонтальный стальной каркас 2, выполненный со сквозными ячейками для размещения модулей I. В узлах прямоугольной координатной сетки под каркасом 2 установлены стойки 4 и блоки фундамента. Под каждой ячейкой размещена рама, прикрепленная к каркасу 2 с помощью вертикальных стальных подвесок, расположенных в плане в углах прямоугольного контура, По сторонам прямоугольного контура размещены алюминиевые наклонные стержни, которые шарнирно прикреплены одним концом к соответствующей подвеске, а другим - к каркасу 2. Угол наклона стержней назначается из условия, чтобы смещение центра рамы относительно центра соответствующей ячейки при изменении температуры воздуха компенсировалось встречным перемещением рамы за счет удпи- нения наклонных стержней. 9 ил. i (Л 5-5 повернуто .J
/ Фиг. г
11
Фиг.
И г/
фиг 5 W 13 1 MJ 2if 23
22
П 2S
30
го
7J
fS
20
15- 19л
Редактор Е.Копча
Составитель Г.Гаврищук Техред И.Попович
Заказ 1123/29 Тираж 607, Подписное
ВНИИПИ Государственного комитета СССР
по делдм изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
Корректор А.Обручар
| Патент США № 3564552, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Манипулятор для установки и снятияАНТЕННыХ СЕКций | 1979 |
|
SU823535A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
