Изобретение относится к транспор ным средствам, в частности, для пере возки длинномерных грузов. Известно транспортное средство в составе тягача и полуприцепа для перевозки длинномерных грузов, содерхсащее грузовую лебедку, опорные поперечины со стойками, накаты и гидро домкраты, закрепленные на полуприцепе 1. Известно также транспортное средство для перевозки длинномерных.грузов, содержёццее платформу, установленный на ней перегрузочный мост, СОСТОЯ1ДИЙ из наружной и внутренней выдвижной рам, грузоподъемный механизм с приводом 2. К недостаткам указанных конструкций следует отнести следующее: при погрузке груз перемещается волоком, что может привести к повреждению наружной поверхности (это недопустимо при погрузке элементов конструкций с изоляционным покрытием); разгрузка производится под действием собственного веса груза, т.е. трубы опускаются перекатыванием, что ставит возможность погрузки - разгрузки в зависимость от геометрической формы поперечного сечения груза. Целью изобретения является о.беспечение погрузки - разгрузки грузов с поперечным сечением любой формы и исключение повреждения наружной поверхности груза. Указанная цель достигается тем, что транспортное средство снабжено кронштейнами с вертикальными пазами, закрепленными на платформе, фиксирующими пальцами, присоединенными к наружной раме перегрузочного моста для перемещения по указанным пазам кронштейнов, присоединенными к внутренней выдвижной раме перегрузочного моста качающимися рычагами для взаимодействия с грузоподъемным механизмом и направляющими, установленными с вожмозностью поворота в вертикальной плоскости посредством силовых цилиндров и имеющими ролики и фиксаторы положения для перемещения по ним грузоподъемного механизма и фиксации последйего, при этом на наружной и внутренней рамах перегрузочного моста закреплены аутригеры с возможностью поворота в вертикальной плоскости.
При ЭТОМ грузоподъемный механизм выполнен в,виде наружной и выдвижной внутренней рам и захватов, установленных с возможностью перемещения вдоль указанных рам, причем на наружной поверхности наружной рамы упомянутого грузоподъемного механизма закреплены запоры для взаимодействия с качаюЕцимися рычагами и выполнены отверстия для размещения в них указаных фиксаторов положения.
Кроме того, транспортное средство снабжено присоединенными к внутренней раме грузоподъемного механизма дополнительными кронштейнами с роликами для взаимодействия с наружной рамой перегрузочного моста,
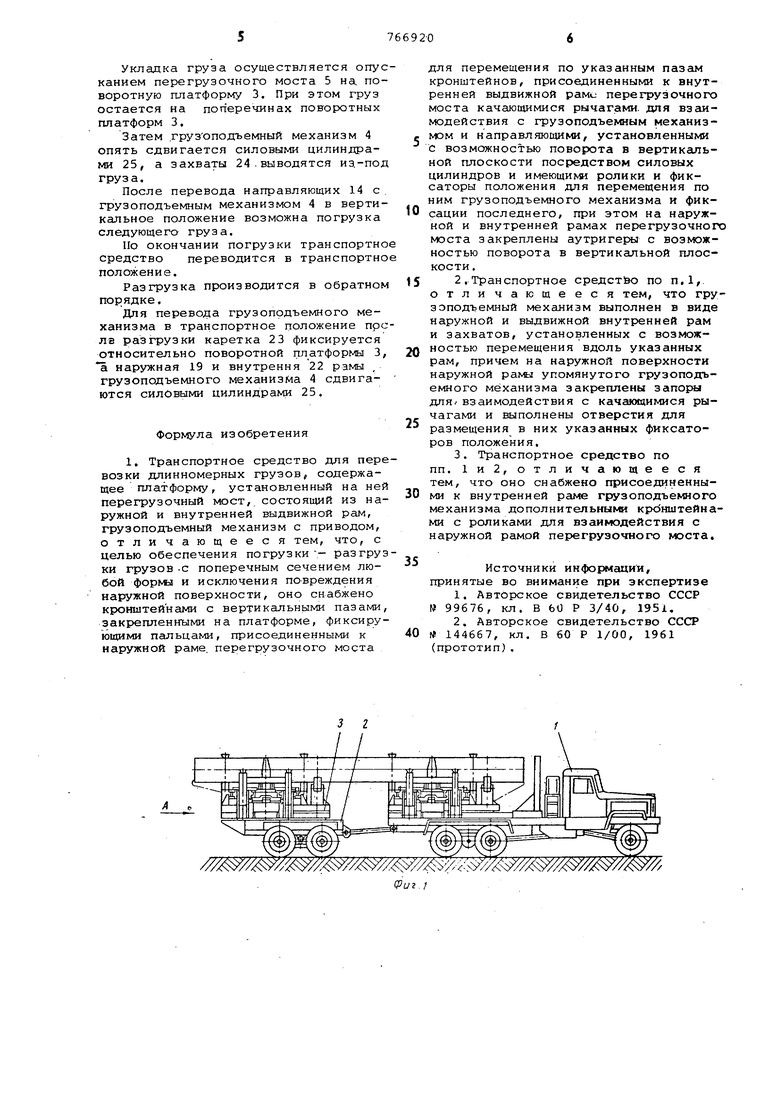
На фиг„1 изображено транспортное средство в транспортном положении, общий вид; на фиг. 2 вид по стрелке А на фиг.1; на фиг.З - транспортное средство при выдвинутом грузоподъемном механизме; на фиг.4 - то же в начальный момент погрузки первого груза ; на фиг.5 - промежуточное положение грузоподъемного механизма во время, погрузки; на фиг.6 - транспортное средство в конечный момент погрузки первого груза; на фиг,7 - то же в начальный момент погрузки второго груза; на фиг.8 разрез Б-Б на фиг.6; на фиг.9 - узел I на фиг.З; на фиг.10 - разрез В-В на фиг.З; на фиг.11 - конструктивная схема грузоподъемного механизма.
Транспортное средство состоит из тягача 1 с одним или двумя прицепами 2, оснащенными поворотными платформами 3 с грузоподъемными механизмами 4 ,
На каждой поворотной платформе 3 имеется перегрузочный мост 5, состоящий из наружной 6 и внутренней выдвижной 7 рам, объединенных между собой приводом 8, выполненным в виде силового цилиндра.
На наружной 6 и внутренней выдвижной 7 рамах шарнирно закреплены поворотные аутригеры 9 и 10, при этом наружная рама 6 снабжена фиксирующими Пс1льцами 11, перемещающимися в пазах кронштейнов 12, жестко закрепленных на поворотных платформах 3.
На раме 7, снабженной качающи1 тас .рычагами 13, выполненными подпружиненными в местах крепления поворотных аутригеров 10, шарнирно закреплны поворотные направляющие 14с силвыми цилиндрами 15, соединяющими поворотные направляющие 14 с корпусами аутригеров 10. Направляющие 14 снабжены роликами 16, в оси которых встроены фиксаторы 17 положения, входящие в отверстия 18 наружной рамы 19 грузоподъемного механизма 4„
На наружной поверхности 20 наружной рамы 19 грузоподъемного механизма 4 размещены запоры 21, взаимодействующие с качающимся подпружиненными рычагами 13 рамы 7 перегрузочного моста 5.
Грузоподъемный механизм 4 выполнен телескопическим и состоит из наf ружной рамы 19, выдвижной внутренней рамы 22 и каретки 2J с захватами 24, силовых цилиндров 2Ь и полиспаста обратного действия 26 с замкнутой эапасовкой грУзовых цепей 27.
К раме 22 прикреплены дополнитель.ные кронштейны 2в с роликами 29, взаимодействующими с наружной рамой 6 лерегрузочного моста 5.
Транспортное средство работает следующим образом.
5 Транспортное средство размещается параллельно грузу и переводится в рабочее положение. Для этого опускаются аутригеры 9 и 10, направляющие 14 силовыми цилиндрами 15 переводятся в горизонтальное положение, а силовыми цилиндрами 25 раздвигается
грузоподъемный механизм. При этом
рама 19 входит в направляющие 14,
контактируя с роликами 16. При край5 нем положении рамы 19 фиксаторы 17 входят в отверстия 18.
Одновременно запоры 21 взаимодействуют с качающимся подпружиненными рычагами 13 и силовыми цилиндрами
- 2Ь сдвигается грузоподъемный механизм 4.
Силовыми цилиндрами 15 направляющие 14 вместе с грузоподъемным механизмом 4 переводятся в вертикальное
положение. При этом захваты 24 кареток 2- находятся в крайнем нижнем положении.
Выдвижением рамы 7 перегрузочного моста 5 вводят захваты 24 под
0 груз и опиранием домкратов аутригеров 9 и 10 перегрузочный мост 5 поднимается над поворотной платформой 3. При этом захваты 24 с грузом отрываются от земли, а фиксирующие
е пальцы 11 наружной раьи 6 перегрузочного моста 5 занимают в пазах кронштейнов 12 крайнее верхнее положение, что позволяет использовать массу тягача 1 или прицепа 2 для
П удержания всей системы в равновесии.
Подъем груза осуществляется за счет одновременного перемещения pai 22 и каретки 23 силовыми цилиндрами 25 с помощью полиспаста обратного действия 26. Грузоподъемный механизм
4 с поднятым на захватах 24 грузом посредством силовых цилиндров 15 и направляющих 14 переводится в горизонтальноеположение. При этом ролики 29 кронштейнов 28 грузоподъемно го
0 механизма 4 опираются на наружную раму 6 перегрузочного моста 5.
После поворота горизонтальное перемещение груза к месту укладки производится тем же грузоподъемным
5 механизмом 4. Укладка груза осуществляется опус канием перегрузочного моста 5 на, поворотную платформу 3. При этом груз остается на поперечинах поворотных платформ 3, Затем .грузоподъемный механизм 4 опять сдвигается силовыми цилиндрами 25, а захваты 24. выводятся из.-под груза. После перевода направляющих 14 с грузоподъемным механизмом 4 в вертикальное положение возможна погрузка следующего груза. По окончании погрузки транспортно средство переводится в транспортно положение. Разгрузка производится в обратном порядке. Для перевода грузоподъемного механизма в транспортное положение пре ла разгрузки каретка 23 фиксируется относительно поворотной платформы 3 а наружная 19 и внутрення 22 рамы грузоподъемного механизма 4 сдвигаются силовыми цилиндрами 25. Формула изобретения 1, Транспортное средство для пере возки длинномерных грузов, содержащее платформу, установленный на ней перегрузочный мост, состоящий из наружной и внутренней выдвижной рам, грузоподъемный механизм с приводом, отличающееся тем, что, с целью обеспечения погрузки- разгру ки грузов -С поперечным сечением любой формл и исключения повреждения наружной поверхности, оно снабжено кронштейнами с вертикальныг и пазами закрепленными на платформе, фиксирующими пальцами, присоединенными к наружной раме, перегрузочного моста для перемещения по указанным пазам кронштейнов, присоединенными к внутренней выдвижной раме перегрузочного моста качающимися рычагами, для взгшмодействия с грузоподъемным механизмом и направляющими, установленными с возможностью поворота в вертикгшьной плоскости посредством силовых цилиндров и имеющими ролики и фиксаторы положения для перемещения по ним грузоподъемного механизма и фиксации последнего, при этом на наружной и внутренней рамах перегрузочного моста закреплены аутригеры с возможностью поворота в вертикальной плоскости , 2 .Транспортное средст)эо по п,1,. отличающееся тем, что грузоподъемный механизм выполнен в виде наружной и выдвижной внутренней рам и захватов, установленных с возможностью перемещения вдоль указанных рам, причем на наружной поверхности наружной paN« упомянутого грузоподъемного механизма закреплены запоры ДЛЯ взаимодействия с качающимися рычагами и выполнены отверстия для размещения в них указанных фиксаторов положения. 3. Транспортное средство по пп. 1и2, отличающееся тем, что оно снабжено присоединенными к внутренней раме грузоподъемного механизма дополнительными кронштейнами с роликами для взаимодействия с наружной рамой перегрузочного моста. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 99676, кл. В 60 Р 3/40, 1951. 2.Авторское свидетельство СССР 144667, кл. В 60 Р 1/00, 1961 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для перевозки контейнеров | 1987 |
|
SU1502415A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 2014 |
|
RU2550062C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ | 2004 |
|
RU2259287C1 |
| Транспортное средство для перевозки контейнеров | 1990 |
|
SU1729845A1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1999 |
|
RU2173270C2 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ СТРЕЛОЧНЫХ ПЕРЕВОДОВ | 2002 |
|
RU2230148C2 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Транспортное средство для перевозки крупногабаритных грузов | 1982 |
|
SU1050931A1 |
| Устройство для погрузки, выгрузки и транспортировки длинномерных грузов | 1978 |
|
SU789299A1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |



г. /
(ригЛ
2tf Г 6
У ш//т/ /ш/ // // // // 23
