
ШАГОВЫЙ ПРИВОД, содержащий корпус и установленные в нем упругий элемент с рабочей полостью и два фиксирующих захвата с управляющими камерами, один из которых выполнен нормально разомкнутым, а другой - нормально замкнутым, отличающийся тем, что, с целью упрощения конструкции и повыщения надежности, управляющие камеры захватов непосредственно связаны с рабочей полостью упругого элемента, выполненного в виде трубки, одним концом жестко связанной с корпусом и нормально замкнутым захватом, а другим - с нормально разомкнутым захватом.
О5
05
00
Изобретение относится к машиностроению и может быть использовано в тех отраслях народного хозяйства, где требуется передача дискретного вращательного движения в герметизированный объем, преимущественно в области высокого и сверхвысокого вакуума.
Известен шаговый привод, содержащий корпус и установленные в нем упругий элемент, рабочие полости и два фиксирующих захвата с управляемыми камерами 1.
Недостаток известного привода - низкая герметизация рабочих полостей.
Известен также шаговый привод, содержащий корпус и установленные в нем упругий элемент с рабочей полостью и два фиксирующих захвата с управляющими камерами, один из которых выполнен нормально разомкнутым, а другой - нормально замкнутым 2.
Недостатки указанного привода - сложность конструкции и невысокая надежность, обусловленные значительными числами трубопроводов и пар трения скольжения.
Цель изобретения - упрощение конструкции и повыщение надежности.
Поставленная цель достигается тем, что в шаговом приводе, содержащем корпус и установленные в нем упругий элемент с рабочей полостью и два фиксирующих захвата с управляющими камерами, один из которых выполнен нормально разомкнутым, а другой - нормально замкнутым, управляющие камеры захватов непосредственно связаны с рабочей полостью упругого элемента, выполненного в виде витой трубки, одним концом жестко связанной с корпусом и нормально замкнутым захватом, а другим с нормально разомкнутым захватом.
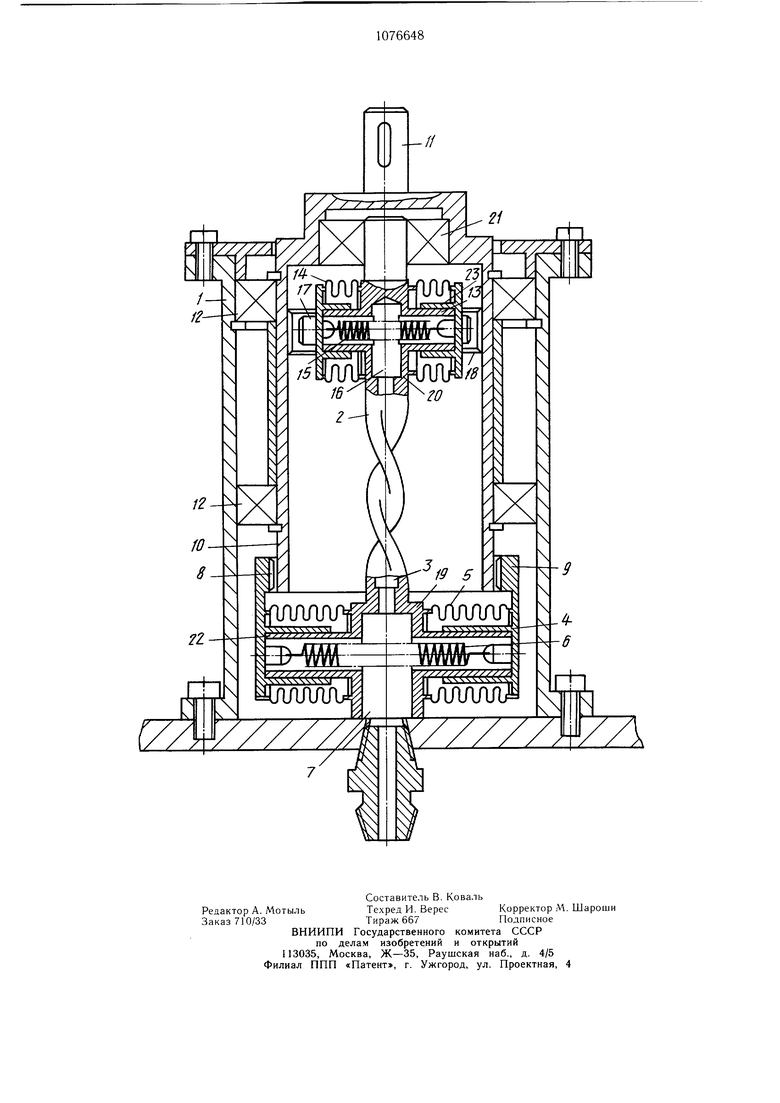
На чертеже изображена принципиальная схема шагового привода.
Шаговый привод содержит корпус 1 с установленным в нем упругим элементом 2 с рабочей полостью 3, выполненным в виде витой трубки, нормально замкнутый захват 4, выполненный в виде сильфона 5, пружины 6, установленной в управляющей камере 7, зубчатого венца 8, установленного с возможностью взаимодействия с выступами 9 стакана 10, связанного с выходным валом 11 и установленного в корпусе 1 в подшипниках 12. Кроме того, привод включает нормально разомкнутый захват 13, выполненный в виде сильфона 14, пружины 15, установленной в управляющей камере 16, выступов 17, установленных с возможностью
взаимодействия с зубчатым венцом 18, также установленным на стакане 10. Рабочая полость 3 непосредственно связана с управляющими камерами 7 и 16. Конец 19 упругого элемента 2 связан с ноормально замкнутым захватом 4 и корпусом 1, а другой конец 20 - с норма/:ьно разомкнутым захватом 13 и установлен в-стакане 10 в подщипнике,21. Сильфоны 5 и 14 разгружаются от изгибающих усилий благодаря направляющим втулкам 22 и 23.
Шаговый привод работает следующим образом.
В исходном состоянии выходной вал 11 связан с корпусом 1 через стакан 10 и нормально замкнутый захват 4, что исключает возможность его поворота. При подаче рабочей среды в полость 3 и соответственно в управляющие камеры 7 и 16 сильфон 5, преодолевая усилие пружины 6, освобождает стакан 10 от в;1аимодействия с корпусом 1. При этом силЕ)фон 14 под действием рабочей среды, преодолевая усилие пружины 15, обеспечивает кинематическое замыкание упругого элемента 2 со стаканом 10 и соответственно с выходным валом 11 через зубчатый венец 18 и выступы 17. Объемы управляющих камер 7 и 16 выбраны так, что в начале срабатывает нормально разомкнутый захват 13, а затем нормально замкнутый захват 4. Упругий элемент 2 стремится распрямиться, поворачивая выходной вал 11 на угол J определяемый давлением рабочей среды и геометрией трубки. При сбросе рабочей среды из полости 3 и соответственно из управляющих камер 7 и 16 под действием пружины 15 нарушается связь между зубчатым венцом 18 и выступами 17, а под действием пружины 6 выступы 9 входят в зацепление с зубчатым венцом 8. Выходной вал 11 зафиксирован от проворота с зубчатым венцом 8. Выходной вал 11 зафиксирован от проворота нормально замкнутым захватом 4. Упругий элемент 2 при сбросе рабочей среды возвращается в исходное состояние, ловорачивая нормально разомкнутый захват 13. При подаче следующего импульса давления рабочей среды цикл повторяется.
Технико-экономическая эффективность предлагаемого шагового привода заключается в сокращении числа трубопроводов и упрощении управлян)щего командоаппарата, что позволяет повысить надежность и расширить область его применения при работе в высоком и сверхвысоком вакууме.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый гидро(пневмо)привод | 1978 |
|
SU846798A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговый привод для малых перемещений | 1979 |
|
SU861766A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
