Изобретение относится к устройствам для квадратно-гнездового посева без мерной нроволоки, предусматривающим применение мерной гусеницы.
Известные устройства подобного рода требуют ручной корректировки, что не обеспечивает точного получения квадратов.
Особенность предлагаемого устройства заклЕочается в том, что, с целью сокран1ения числа обслуживающего персона.та и повышения точности образования квадратов, корректировка работы тнездообразующ.его устройства осуществляется стабилизатором, состоящим из механизма учета неровностей поля в вертикальной плоскости и механизма учета непрямолинейности движения агрегата в горизонтальной нлоскости.
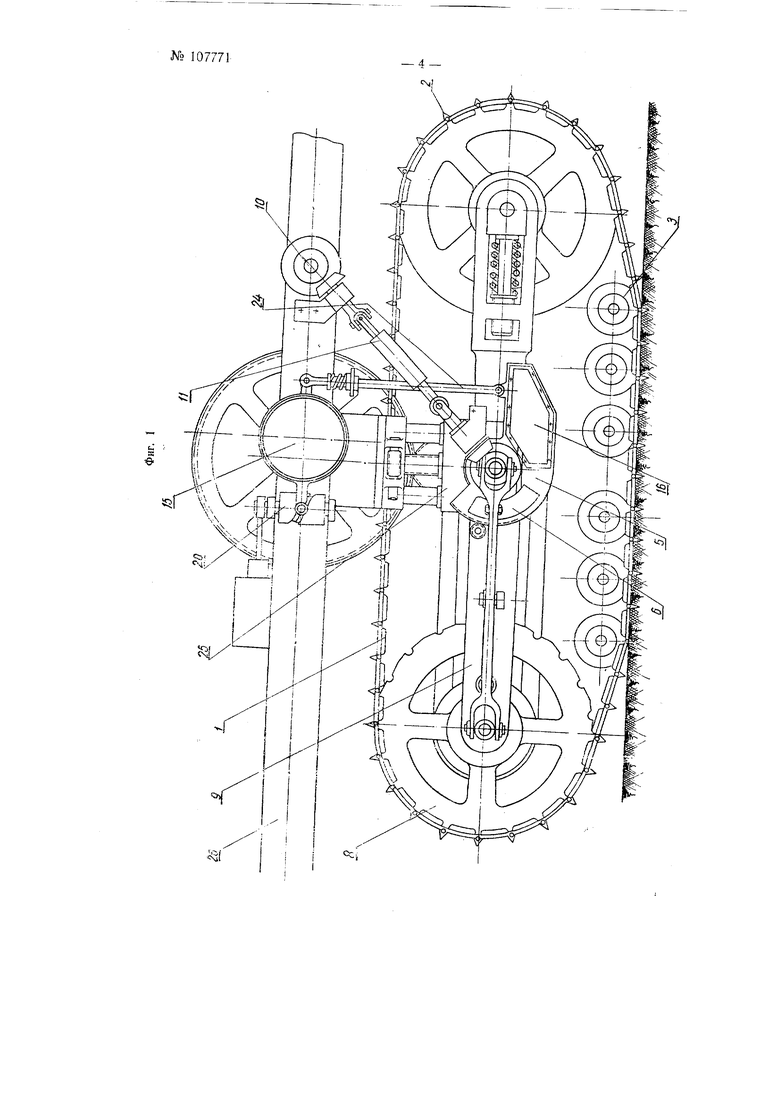
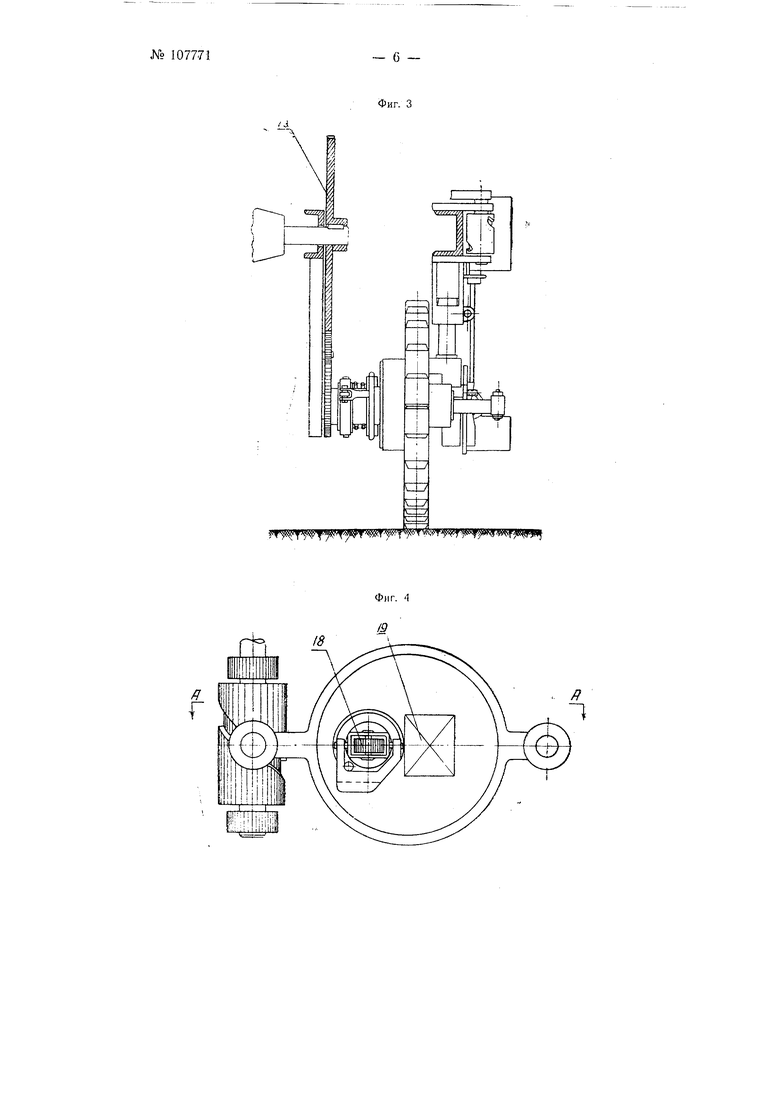
На фиг. 1 показан общий вид устройства сбоку; на фиг. 2-вид в плане; на фиг. 3-вид сзади; на фиг. 4- механизм учета неровностей в горизонтальной плоскости; на фиг. 5- разрез этого механизма по АА, на
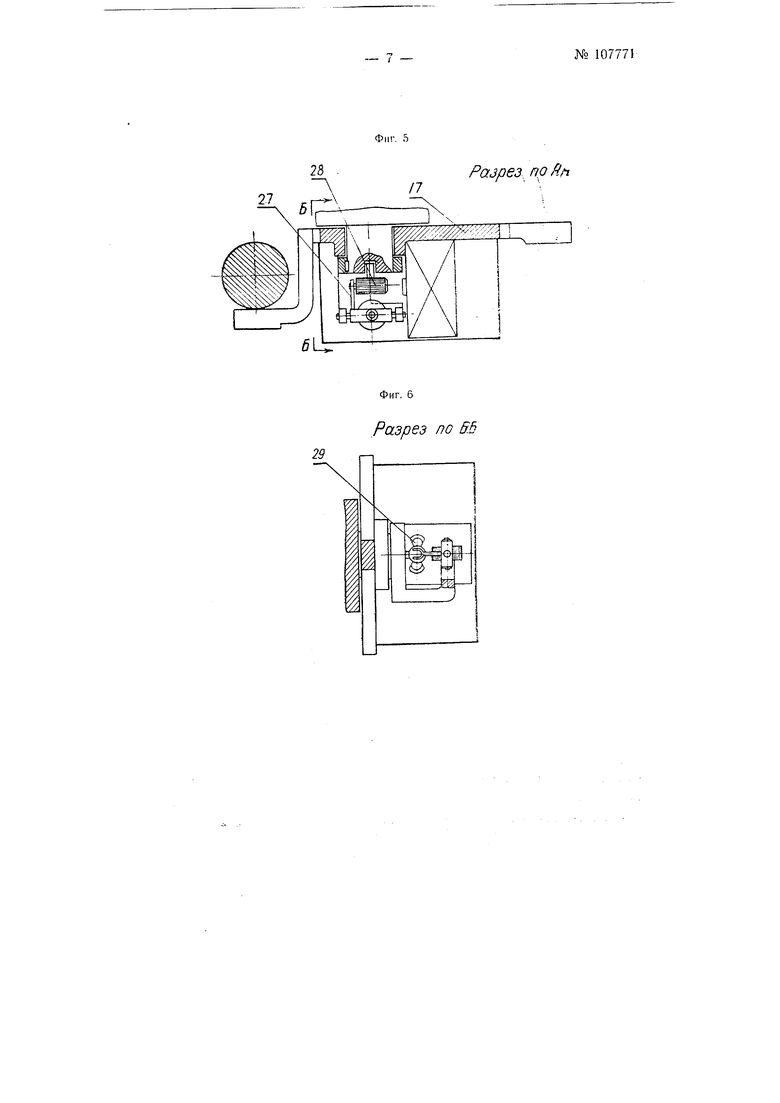
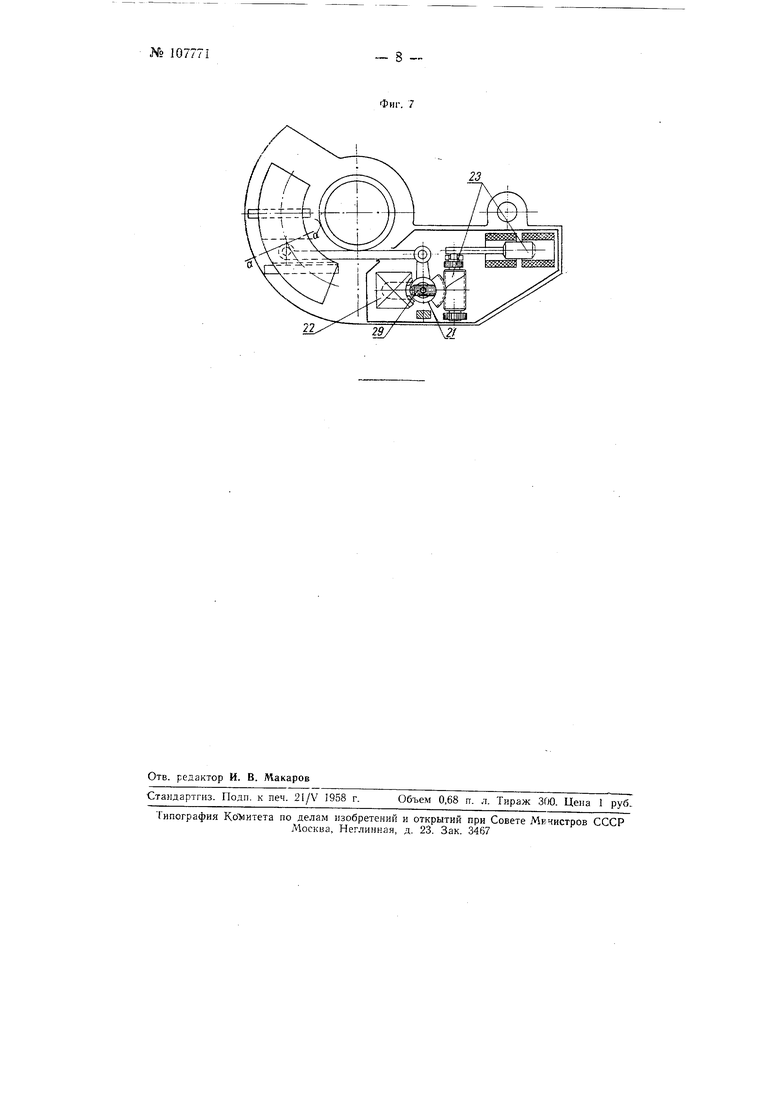
фиг. 4; на фиг. 6-разрез по ББ на фиг. 5; па фиг. 7-разрез механизма учета неровностей в вертикальной плоскости.
Устройство состоит из следующих основных механизмов: ходовой части, стабилизатора и механизма, воспринимаюнюго на себя момент сопротивления всех узлов Зстройства.
Ходовая часть состоит из гусеницы 1, упоров 2 и опорных катков 3.
Возможное провисание опорного участка гусеницы учитывается «орректнруюпщм механизмом, состоящим из вариатора 4, кулачкового диска 5, ку.тамка 6 и ролика 7, работаюпяего в зависимости от вращения колеса гусеницы 8 п от наклона рамы 9 гусен1 цы.
Иосадочные крыльчатки (на фиг. не показаны) приводятся во вращение через трансмиссио П1ЫЙ валик Ю и карданный вал 11.
Л1еханизм, воспринимающий на себя момент сопротивления всех узлов устройства, состоит из фрикцнониой муфты 12, цепной передачи 13 и нажимного регулятора М.
Стабилизатор состоит из механизма учета неровностей поля 15 в вертикальной ллоскости и механизма учета неровностей 76 в горизонтальной плоскости. Механизм 15 состоит из поворотного диска 17 (фиг. 4) гироскопа 18 с двумя стеиенями свободы, с гидравлическим или пиевматическим успокоителем, фотореле 19, приводного силового механизма
20(фиг. 1).
Механизм 16 состоит из гироскопа
21(фиг. 7) с двумя степенями свободы и успокоителем, фотореле 22 и приводного и силового устройств 23. Механизмы 15 и 16 соединены между собой тягой 24 (фиг. 1). Рама гусеницы расположена на оси подъемного башмака 25.
При прямолииейном движении сажалки по ровной .поверхности поворот высажнваюи1,их крыльчаток на 90° соответствует повороту колеса гусеницы 1 на 180°, обп1ая окружность которого равна 1400 мм; механизмы 5 и 16 в это время находятся в нерабочем положении.
При прямолинейном движеиии сажалки по неровной поверхности поля рама 26 сажалки приходит в колебательное движение вокруг точки О, что вызывает гироскопический момеит гироскопа 18 (фиг. 4), благодаря которому рамка гироскопа повертывается вокруг своей оси в определенную сторону. Этим поворотом рамка гироскопа посредством вилки 27 удерживает осветитель -фотореле 28 (фиг. 5) в горизонтальном положении. Но так как поворотный диск 17 посредством привода 20 (фиг. 1) связан с рамой сажалки, то, поворачиваясь, он подставляет под осветитель 29 (фиг. 6) один из тубусов фотореле 19, который включением электромагнита двойного действия привода 20 (фиг. 1) поворачивает диск 17 (фиг. 5) в обратном направлении и ставит его на прежнее положение. Таким образом, независимо от колебаний рамы 26 диск 17 и соединенный с ним кулачковый диск о всегда находятся в неизменном положении.
Движение сажалки по неровной поверхности вызывает наклон ра.мы 9, но так как ось ку-лачкового диска 5 всегда горизонтальна, то при повороте рамы гусеиицы вокруг оси ролик 7, накатываясь на кулачок 6, изменяет передаточное число вариатора. Угловая скорость шкивов вариатора различная: ведомый шкив врашается медленнее. Замедленное враи1,ение шкива вариатора замедляет вращение посадочных крыльчаток, и посадка картофеля происходит несколько позже на величшгу неровности поверхности поля. Механизм 16 в данном случае находится в нейтральном положении, так как движение прямолинейно.
При криволинейном движении по ровной поверхности поля механжзм 15 находится в нейтральном положении, при отклонении сажалки вправо или влево от заданного направления (поворот вокруг вертикальной осп) в гироскопе 21 (фиг. 7) возникает гироскопический момент, который иоворачнвает рамку гироскопа в сторону и вместе с последней поворачивается и осветитель 29 фотореле. При этом свет от осветителя попадает на один из тубусов фотореле 22, который включает электромагнит и привод 23 в действие. Повериув фотореле до нейтрального пОиЧожения, электромагнит соответственно передвигает на иовое иоложение кулачок 6 (фнг. 2).
Перемещаясь, кулачок 6 изменяет передаточное число вариатора, тогда посадка картофеля происходит позже па величину неровности в горизоитальной плоскости.
Для устранения иробуксовки .гусеницы крутяи 1ий момент, необходимый для перекатывания гусеницы по полю, полностью уравновешивается моментом фрикционной муфты 12, работающей от вала сажалки. При движении устройства по наклонной плоскости, составляющая от веса касательная сила автоматически учитывается .мным регулятором 14. Кроме того, перед гзсеницей на тракторе установлены три нажимных катка для выравнивания поверхности почвы.
Предмет и з о б ) е т е п п я
1.Устройство для квадратно-гнездового посева без мерной проволоки, предусматривающее провешивание линии первого прохода агрегата и применение мерной гусеницы, отличающееся тем, что, с целью сокращения числа обслуживающего персонала и повыщения точности образования квадратов, корректировка работы гиездообразующего устройства осуществляется стабилизатором, состоящим из механизма учета неровностей поля в вертикальной плоскости и механизма учета иенрямолинейностн движения агрегата в горизонталь)юй плоскости.
2.Форма выполнения по п. 1, отл и ч а ю т а я с я тем, что механизмы учета иепрямолинейиости движения агрегата в горизонтальной плоскости и неровиостей поля, состоянше из гироскопов с двумя степенями свободы с успокоителями, фотореле, приводных и силовых устройств, при отклонении агрегата в стороны от направления движения или при наклоне рамы в вертикальной плоскости за счет гироскопического момента, поворачивающего рамку соответствующего гироскопа, осун1ествляюг изменение передаточного числа вариатора привода мерной гусеницы и скорости вращения высаживающей крыльчатки.
3. Форма выполнения по п. 1, отл и чающаяся тем, что, с целью умеиьпшпия пробуксовки мерной гусеницы от неровностей почвы, па тракторе устаповлепы катки, уплотняюпще noMijy перед гусеницей. № 107771
| название | год | авторы | номер документа |
|---|---|---|---|
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ БЛОК | 2003 |
|
RU2251509C1 |
| СПОСОБ КВАДРАТНОГО РАЗМЕЩЕНИЯ СЕМЯН, КЛУБНЕЙ (ГНЕЗДАМИ) ИЛИ РАССАДЫ | 1954 |
|
SU102108A1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| Полунавесная сажалка картофеля | 1981 |
|
SU1034213A1 |
| СФЕРОМОБИЛЬ С ГИРОСКОПИЧЕСКОЙ ПОДДЕРЖКОЙ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ | 2020 |
|
RU2733672C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| Автоматическая линия для изготовления тканых коммутационных плат | 1979 |
|
SU912031A1 |
| ПОЧВООБРАБАТЫВАЮЩЕ-ПОСЕВНОЙ АГРЕГАТ | 2002 |
|
RU2239296C2 |
| Поточная линия Гонтаря С.П. для изготовления гнутых профилей | 1985 |
|
SU1389912A1 |
| Агрегат для выполнения комплекса работ по устройству бордюров автодорог | 2021 |
|
RU2777314C1 |

fi
61Ь
29
Разрез, по
Разрез по &5
23
29/ 21
