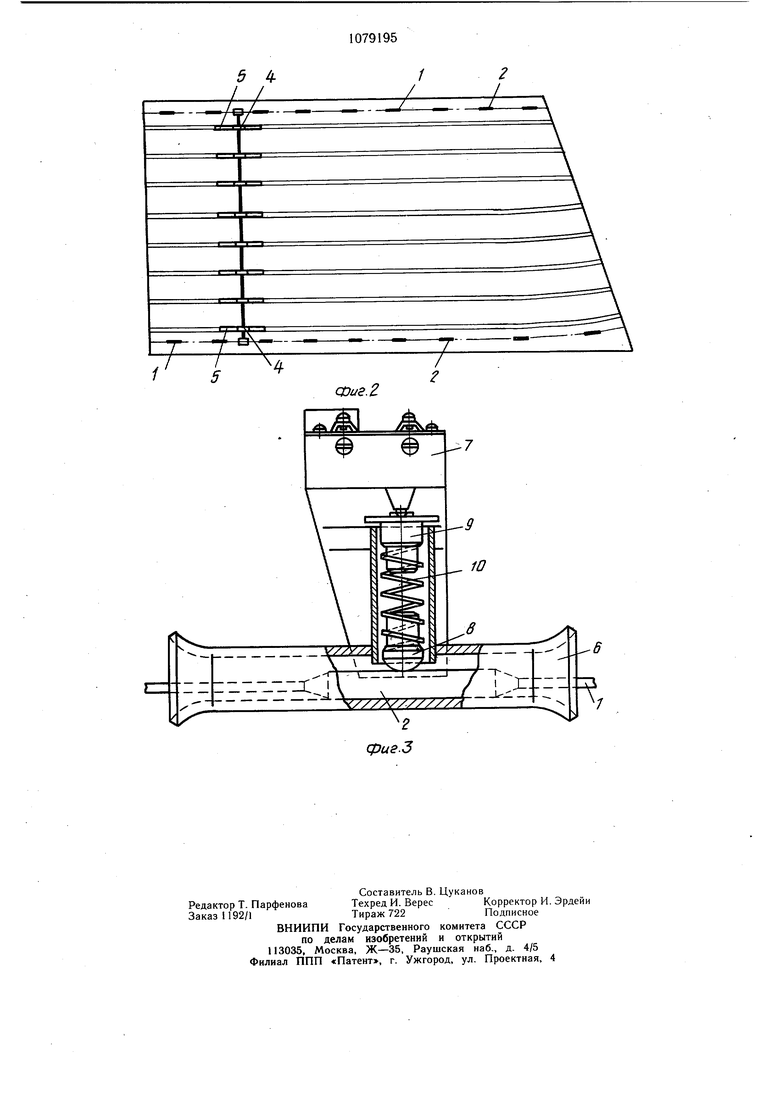
Изобретение относится к сельскому хозяйству и может быть использовано при поливе многоопорными дождевальными машинами фронтального действия. Известна система автоматического вождения многоопорных дождевальных машин фронтального действия, включаюшая направляюш,ий оросительный канал и выполненных в виде роликов, взаимодействуюш,их с откосом и кинематически связанных с механизмом остановки концевых опор дождевальной машины, следящих элементов 1. Недостатком этой системы является сложность конструкции. Известна и другая система автоматического вождения многоопорных дождевальных машин фронтального действия, включаюшая направляюш,ие и рычаговые следяшие элементы, кинематически связанные между собой и механизмом остановки концевых опор дождевальной машины 2. Однако для данной системы характерен низкий коэффициент земельного использования вследствие того, что не обеспечивается вождение всех опорных тележек по одному и тому же следу. Цель изобретения - увеличение коэффициента земельного использования путем обеспечения прохождения опорных колес машины по одной и той же колее, а также при орошении полей. Достигается цель тем, что направляюшие элементы выполнены в виде установленных по границам поля и расположенных на одинаковых расстояниях друг от друга датчиков положения машины, взаимодействующих со следящими элементами. При орошении полей неправильной формы, датчики, расположенные по удлиненной сторрне поля, установлены на расстоянии друг от друга большем, чем датчики, paQположенные на укороченной стороне поля. На фиг. 1 изображена схема системы при поливе полей с правильной конфигурацией; на фиг. 2 - то же, при поливе полей неправильной конфигурации; на фиг. 3 - вариант исполнения следящего элемента и взаимодействие ее с датчиком положения машины. Система состоит из установленных по границам поля и расположенных на одинаковых расстояниях друг от друга датчиков положения 1 машины 2. На концах дождевальной машины 2 установлены следящие элементы 3, кинематически.связанные с механизмом остановки 4 концевых опор 5. Следующий элемент 3 состоит из подушки 6, выключателя 7, тарелки 8, толкателя 9 и пружины 10. Система многоопорных дождевальных машин фронтального полива работает следующим образом. При движении дождевальной машины расположенные на тросах 1 датчики 2, роходя через подушку 6, воздействуют на тарелку 8 и через пружину 10 перемещают толкатель 9. Толкатель 9 прижимает контакт выключателя 7 и размыкает электрическую цепь привода концевой опоры 5, останавливая временно ее до подхода противоположной концевой опоры к сблокированному датчику на противоположной стороне поля. Парное срабатывание двух выключателей 7 обеспечивает замыкание цепи включения привода обеих концевых опор. Движение машины продолжается до следующей пары датчиков. Таким образом, происходит выравнивание машины и автоматически продолжается ее движение по заданному курсу. Точность перемещения определяется по повторному прохождению опорными колесами по ранее оставленному следу и может регулироваться изменением расстояния между датчиками. Движение промежуточных опор и их выравнивание по фронту движения обеспечивает известная система синхронизации, широко применяемая в конструкциях существующих машин. Система автоматического вождения может обеспечивать вождение машины и на полях с неправильной конфигурацией. За счет увеличения расстояния между датчиками, установленными на удлиненной стороне поля по сравнению с расстоянием между датчиками на укороченной стороне, происходит плавный закономерный по траектории разворот машины. При обратном движении опорные колеса пройдут по ранее оставленному следу. Использование изобретения позволяет снизить потери урожая от вытаптывания и дает экономию на сумму 630,44 тыс. рублей.
5 4
/ /
7
/ 5
Фиг.2
/
Т.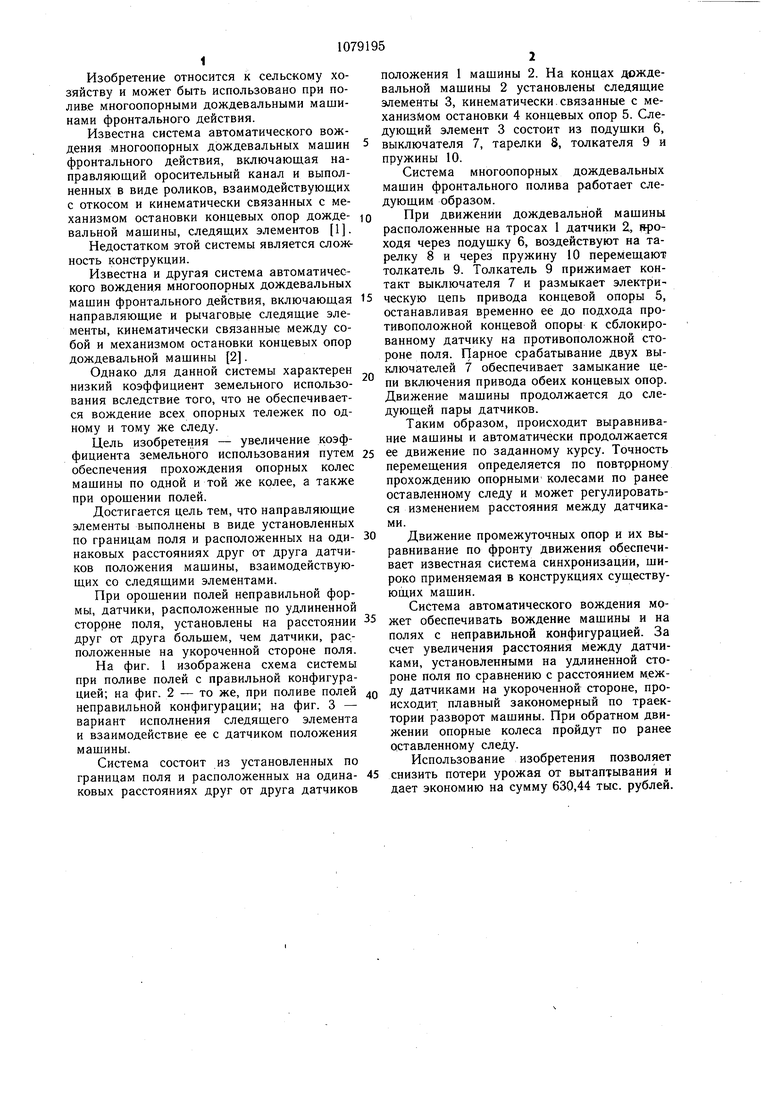
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| Многоопорная дождевальная машина кругового действия | 1979 |
|
SU745443A1 |
| Многоопорная дождевальная машина | 1985 |
|
SU1373365A1 |
| СПОСОБ ДВИЖЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ ПРИ ПОЛИВЕ ПОЛЕЙ КВАДРАТНОЙ ИЛИ ПРЯМОУГОЛЬНОЙ КОНФИГУРАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2562214C2 |
| Многоопорная дождевальная машина фронтального действия | 1987 |
|
SU1606028A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Устройство для вождения многоопорной дождевальной машины | 1983 |
|
SU1142063A1 |
| Устройство стабилизации курса многоопорной дождевальной машины | 1982 |
|
SU1063308A1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2008 |
|
RU2377766C1 |
| Устройство управления многоопорной дождевальной машиной | 1984 |
|
SU1175399A1 |
1. СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО ДЕЙСТВИЯ, включающая направляющие и следящие элементы, кинематически связанные между собой с механизмом остановки концевых опор дождевальной мащины, отличающаяся тем, что, с целью увеличения коэффициента земельного использования путем обеспечения прохождения опорных колес мащины по одной и той же колее, направляющие элементы выполнены в виде установленных по границам поля и расположенных на одинаковых расстояниях друг от друга датчиков положения мащины, взаимодействующих со следящими элементами. 2. Система по п. 1, отличающаяся тем, что с целью увеличения коэффициента земельного использования путем обеспечения прохождения колес мащины по одной и той же колее при орощении полей с неправильной конфигурацией, датчики, расположенные на удлиненной стороне поля, установлены на расстоянии друг от друга больщем, чем датчики, расположенные на укороченной стороне поля. (Л ; / / 1 со QO СП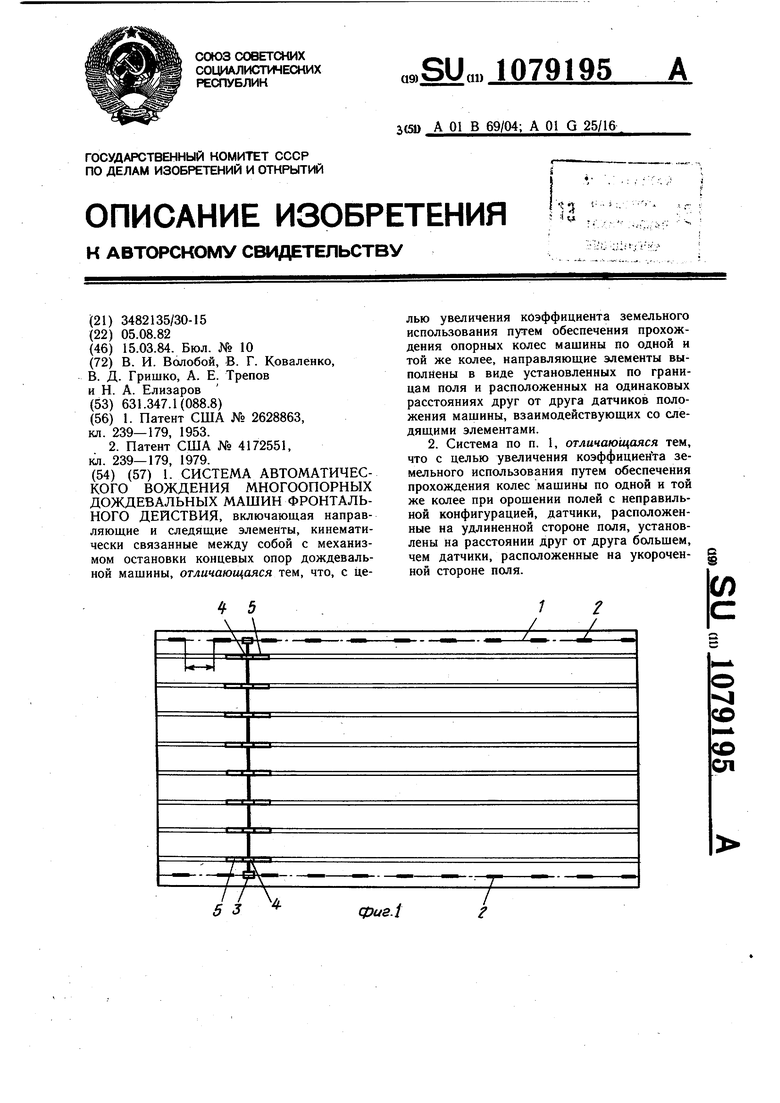
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Состав для стерилизации | 2016 |
|
RU2628863C1 |
| Коловратный насос с кольцевым поршнем, перемещаемым эксцентриком | 1921 |
|
SU239A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4172551, кл | |||
| Коловратный насос с кольцевым поршнем, перемещаемым эксцентриком | 1921 |
|
SU239A1 |
