Изобретение относится к приборо строению и может быть использовано для градуировки шкал приборов. Известен универсальный полуавто мат для нанесения рисок на шкалах, содержаи иЯс поворотное устройство с делительным механизмом, суппорт с с резцедержателем, механизмы автом тического устаноаа длины и глубины нарезания рисок и пневмоэлектричес схему с узлами возвратно-поступател ного и вращательного движений Г13. Недостатком указанного устройст является невысокая точность гравировки. Обусловленная наличием люфто в сложных механических узлах и элем так кинематической цепи. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для градуировки шкал генераторов си йалов, содержащее последовательно соединенные автооператор, частотоме процессор, блок управления автоопеLrV ItnUj l TT at2 lX-« 13 г -а тлуятз л ратором, установленные на станине автооператора верньерный механизм перемещения указателя частоты с шаговым электроприводом и горизон тальная каретка с шаговым электроприводом, на которой установлена вертикальная каретка, и граверный узел с электроприводом вращения резца и электромагнитньнл приводом его линейного перемещения, при этом все электроприводы соединены с выходом блока управления автооператором 23. Указанное устройство осуществляе автоматическую разметку частотных точек на градуируемой шкале, но не позвол ет гравировать штрихи по раз меченным точкам. Применение же копировально-фрезерного станка для целей гравировки приводит к ручным операциям совмещения резца станка с размеченныьда точками, Использование станков с программным управлением практически невозможно,, поскольку для каждой шкалы необходимо быЛо бы составлять индивидуально программу гравировки, измеряя для этого расстояние между всеми размеченными точками. Таким образом, известные .устройства не позволяют автоматизировать процесс градуировки и полиостью исключить ручные операции, которые из-за утомляемости оператора и вносимой им субъективной погрешности ведут к снижению производительности градуировки шкал генераторов и ее точности. Целью изобретения является повыш ние точности и производительности градуировки шкал генераторов. Цель достигается тем, что в уст.ройстве, содержащем последовательно соединенные автооператор, частотомер, процессор, блок управления.автооператором, установленные на станине автооператора верньерный механизм перемещения указателя частоты с шаговым электроприводом и горизонтальная каретка с шаговым электроприводом, на которой установлена вертикальная каретка, и граверный узел с элек троприводом вращения резца и элек. . . тромагнитным приводом его линейного перемещения, причем все электроприводал соединены с выходом блока управления автооператором, в автооператор введены дополнительная горизонтальная каретка с шаговым электродвигателетл, подвижная платформа для генератора сигналов, датчик положения основной горизонтальной каретки и оптоэлектронный блок с фотоприемником, закрепленный на вертикальной каретке, снабженной электроприводом, соединенным с выходом блока управления автооператором, при этом дополнительная каретка выполнена в виде столика для градуируемой шкалы, установленного на закрепленных на станине направляющих и кинематически связанного с шаговым электродвигателем, соединен- . ным с выходом блока управления автооператором, входы которого соединены с.фотоприемником и датчиком положения, причем граверный узел закреплен на основной горизонтальной каретке, а подвижная платформа установлена на станине с возможностью перемещения параллельно:, перемещению венозной горизонтальной каретки. 1. На фиг. 1 изображена схема устройства; на фиг. 2 - дополнительная горизонтальная каретка; на фиг. 3 граверный узел, разрез. Устройство (фиг. 1) содержит автооператор 1, на станине 2 которого жестко закреплены неподвижная платформа 3, направляющая 4 горизонтальной каретки 5 и цилиндрическая направляющая б для дополнительной горизонтальной каретки в виде столика 7. На неподвижной платформе 3 с возможностью продольного перемещения ус танавливается подвижная платформа 8, к которой жестко с возможностью съёма крепится градуируемый генератор 9 , причем перемещение платформы 8 обеспечивается вращением ручки 10. Ось настройки 11 генератора 9 через редуктор 12 связана с шаговым электодвигателем 13. Указатель частоты 14 генератора 9 может перемещаться вдоль генератора с помощью верньерного механизма (не показан) связанного с осью 11. Градуируемая . кала 15 жестко с возможностью съема закрепляется на каретке 7, к6торая слева имеет роликовую опору 16 (фиг. 2 ), закрепленную на эксцентрике 17, а справа - роликовые опоры 18, обеспечивающие передвижение каретки по цилиндрической направляющей 6. Эксцентрик 17 роликовой опоры 16 и цилиндрическая направлянидая 6 крет --тся к общей стани 2. В теле каретки 7 закреплена зубчатая рейка 19, связанная через редуктор 20 с шаговым электродвигателем 21, крепящимся к станине 2. На горизонтальной каретке 5 жестко закреплен граверный узел 22 (фиг в состав которого входят резец 23, внутренняя гильза 24 с пазами сцепной муфты 25 и шарикоподшипником 26 внешняя гильза 27 с зубчатым колесом 28 и выступами сцепной муфты 25 устанавливаемая в шарикоподшипниках 29, зубчатое колесо 30 повышающего редуктора, сцепная муфта 31, закрепленная на оси электродвигателя 32, рычаг 33 со штифтами 34, соленоид 35 На горизонтальной каретке 5 жестко закреплена направляющая 36 вертикальной каретки 37 (фиг. 1), вьшол венная в виде зубчатой рейки. Перещение вверх и вниз каретки 37 обеспечивается электродвигателем 38. На каретке 37 жестко укреплен оптоэлектронный блок с фотоприемником 39, выполненным, например, на фотоматрице и имеющим оптический прицеп 40 и объектив 41. С горизонтальной кареткой 5 жестко связана зубчатая рейка 42, которая с помощью редуктора 43 и шагового электродвигателя 44 осуществляет продольное движение каретки. Для обеспечения точной начальной установки граверного узла горизонтальная каретка 5 снабжена датчиком положения 45, выполненным, например, в виде оптронного ; атчика световой поток которого взаимодействует с флажком 46, закрепленным на валу шагового электродвигателя 44 Автооператор 1, частотомер 47, процессор 48 и блок управления автоопе ратором 49 с пультом 50 электрически последовательно соединены. Проце сор 48 соединен с устройством ввода программ 51. Предлагаемое устройство градуи7 ровки шкал генераторов работает сле дующим образом. В начальный момент оператор, вра щая ручку 10, осуществляет продольное перемещение платформы 8 и вмест с ней генератора 9 таким образом, чтобы технологическое отверстие на генераторе 9 попало в перекрестие оптического прицела 40 фотоприемника 39, обеспечивая тем самым совмещение оптической оси фотоприемника .39 с технологическим отверстием. Расстояния между оптической осью фотоприемника 39 и резцом 23 граверного узла 22 выбраны такими, что ри установке технологического отверстия в перекрестке оптического прицеа острие резца 23 устанавливается о оси технологического отверстия в шкале 15. Такая подстройка необходима для компенсации технологического разброса линейных размеров генератора 9. Однако неточность начальной установки горизонтальной каретки 5 может привести к дополнительной погрешности начальной установки острия резца 23, свою, очередь может привести к недопустимой систематической погрешности градуировки. Для устранения неточности начальной установки горизонтальной каретки 5 используется оптронный датчик положения 45, световой поток в котором перекрывается флажком 46. При поступлении импульсов на шаговый электродвигатель 44 флажок 46 периодически перекрывает световой поток датчика и сигналы с него поступают в блок управления автооператором 49. Зубчатая рейка 42 посредством редуктора 43 приводится в движение, каретка 5, движется справа налево и замыкает Левый концевой выключатель (не показан ). Замыкание левого концевого выключателя приводит к тому, что блок управления автооператором 49 реагирует на очередной после этого замыкания импульс с оптронного датчика -45 и шаговый электродвигатель 44 останавливается. Подобная организация датчика положения-обеспечивает точность остановки горизонталь- . ной каретки 5 в левом положении, равную ее линейному перемещению при подаче на электродвигатель 44 одного импульса (например, 0,2 мм). После завершения начальной установки оператор нажимает кнопку Пуск .на пульте управления 50. При этом с блока управления автооператора 49 на шаговые электродвигатели 13 и 44 начинают поступать импульсы. Указатель частоты 14 начинает перемещаться слева направо. Координатная каретка 5 также начинает перемещаться в том же направлении. Так как перемещением указателя частоты 14 и горизонтальной каретки 5 управляют не связанные между собой электромеханические систегФа, то во время движения возможно их рассогласование по положению, что эквивалентно отклонению оптической оси фотоприемника 39 от визирной линии указателя частоты 14. С целью компенсации указанного рассогласования с фотоприемника 39 на блок управления автооператора 49 подают сигналы, которые обрабатываются специальными логическими схемами блока и в зависимости от знака рассогласования блокируют подачу импульсов на один из шаговых электродвигателей 13 или 14. В результате этого тормозится . электродвигатель 13 или 44, что при водит к кокшенсации рассогласования Применение в фотоприеьшике 39 фото:матрицы позволяет получить высокую разрешаклцую способность следя& ей системы. В данном конкретном пример разраиающая способность ограничена только, линейным перемещением указателя частоты 14 и горизонтальной каретки 5 за один шаг и равна 0,2 tA Измеряемая частота {fизм генератора 9 поступает на электронносчет ный частотомер 47, где измеряется, а результат измерения в цифровом коде ;Е|ыдается в процессор 48, где к моменту выдачи вычисляются верхний и нижний допусти1 ле пределы отклонения частоты и ее номинальное значение для точки, подлежащей градуировке. ЕСЛИ измеренная частота окажется меньше нижнего предела, то на влоке-управления автооператором 49 вьщается разрешение на следукяций шаг если находится в пределах допуска, то вьфабатывается команда 1радуировки. При наличии команды градуировки блокируется подача импульсов на шаговые электродвигатели 13 и 44, движение указателя частоты 14 и горизонтальной каретки 5 прекращается и команда градуировки выполняется граверны узлом 22 и кареткой 7. Выполнение команды градуировки кареткой 7 происходит следующим образом. При наличии этой команду на шаговый электродвигатель 21 поступает определенное число иппульсов {в зависимости от длины гравируемого штриха Ь зубчатая рейка 19 приводит каретку 7 в движение и углубленный в шкалу 15 резец 23 грави рует в ней штрих соответствующей дли ны. Наличие у каретки 7 справа цилин дрической направляющей 6 на роликовых опорах 18, а слева роликовой опо ра 16 с эксцентриком 17 -дает воз1« жность установки {регулировки } путем поворота эксцентрика плоскости карет ки 7 относительно плоскости Направляющей 4 каретки 5 с точностью до 0,01 NBVI, что необходимо для равно(мерности глубины резания при гравировке штрихов на всей площади шкалы 15. По окончании гравировки штриха напряжение с соленоида 35 снимается, резец 23 отходит от шкалы 15, каретка 7 останавливается и продолжается дальнейшее движение горизонтальной каретки 5 и указателя частоты 14 слева направо до получения следующей команды на гравировку штриха. После градуировки первого поддиапазона генератора происходит возвратное движение горизонтальной каретки 5 и указателя частоты 14 до срабатывания концевого выключателя. Далее вертикальная каретка 37 и вместе с ней фотоприемник 39 с помощью электродвигателя ,38 опускаются до положения, соотвётствуицего следугацему поддиапазону генератора 9 ( на шкале поддиапазоны идут сверху вниз при увеличении частоты ). Это позволяет скомпенсировать систематическую погрешность градуировки, возникающую из-за наличия некоторого отклонения от вертикали визирной линии указателя частоты 14 при его установке на генератор. Особенно это отклонение может сказаться, если не проводить упомянутой операции при градуировке последнего поддиапазона генератора, так как относительное отклонение указателя частоты l-f от вертикали здесь наибольшей величины и погрешность градуировки может стигнуть более 1%, что недопустимо. После установки следующего поддиапазона работа устройства происходит аналогично описанному выше. Таким образсил, использование предложенного устройства обеспечивает автоматическую синхронизацию перемещ ний верньерного механизма указателя частоты генератора и граверного узла и совместит разметку с гравировкой шкалы, что позволяет повысить точность и производительность градуировки.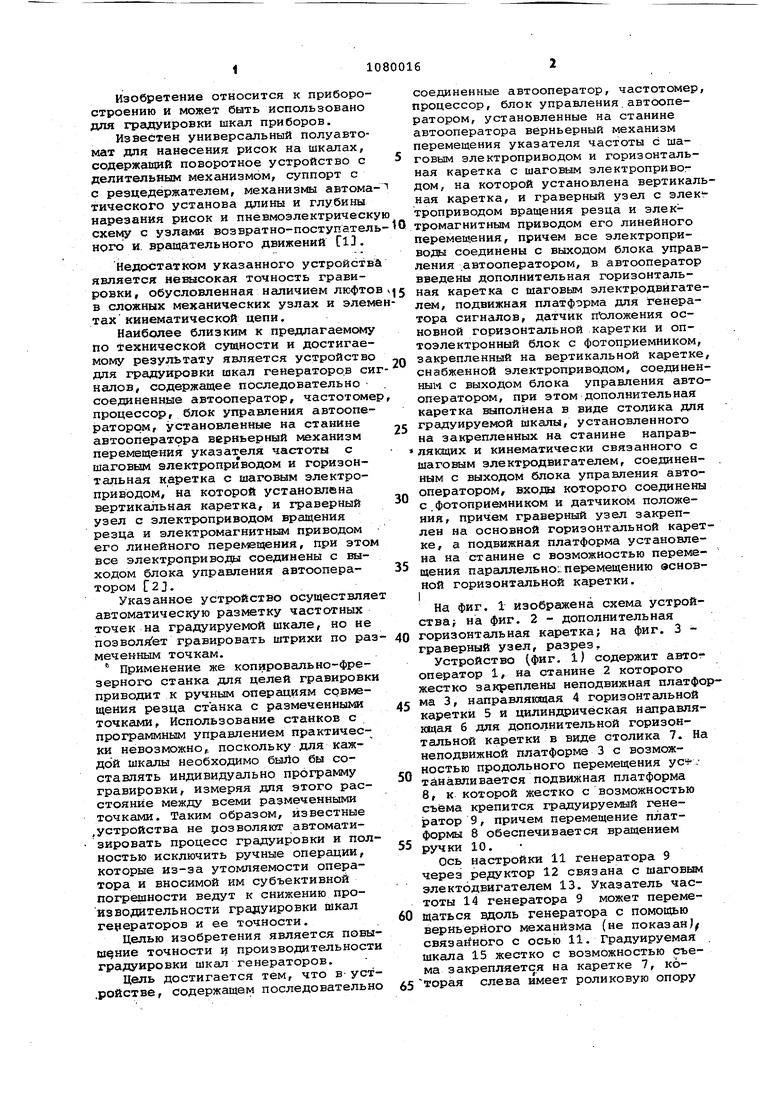


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки электромагнитных измерительных приборов и устройство для его осуществления | 1986 |
|
SU1460708A1 |
| УСТРОЙСТВО ДЛЯ ОБТОЧКИ КРИСТАЛЛОВ | 1991 |
|
RU2030998C1 |
| Устройство для автоматической градуировки и печатания шкал измерительных приборов | 1986 |
|
SU1406549A1 |
| УСТАНОВКА ПОВЕРОЧНАЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ АВТОМАТИЗИРОВАННАЯ И СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВЕРТИКАЛЬНЫХ УСТАНОВОК ДЛЯ МЕТРОЛОГИЧЕСКОЙ АТТЕСТАЦИИ ДВУХ УРОВНЕМЕРОВ ОДНОВРЕМЕННО | 2012 |
|
RU2495384C1 |
| Установка для градуировки датчиков линейного перемещения | 1989 |
|
SU1679175A1 |
| Устройство для поверки и градуировки расходомеров | 1977 |
|
SU726433A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Устройство для градуировки измерительных преобразователей переменного давления | 1986 |
|
SU1392410A2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ГРАДУИРОВКИ ЭЛЕКТРОМАГНИТНЫХ АМПЕРМЕТРОВ | 1996 |
|
RU2121155C1 |
| Устройство для нанесения делений на ампулы | 1978 |
|
SU743957A1 |


УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ ШКАЛ ГЕНЕРАТОРОВ СИГНАЛОВ, содержащее последовательно соединенные автооператрр, частотомер, процессор, блок управления автооператором, установленные на станине автооператора верньерный механизм перемещения .указателя частоты с шаговым электроприводом .и горизонтальная каретка с шаговом электроприводом, на которой установлена вертикальная каретка, и граверный узел с электроприводом Эращения резца и электромагнитным приводом его линейного перемещения. причем все электроприводы соединены с выходом блока управления автооператором, отличающееся тем, что,.с целью повышения точности и производительности градуировки, в автооператор введены дополнительная горизонтальная каретка с шаговым электродвигателем, подвижная платформа для генератора сигналов, датчик положения основной горизонтальной каретки и оптоэлектронный блок с фотоприемником, закрепленный на вертикальной каретке, снабженной электроприводом, соединенным свыходом блока управления автооператором, при этом дополнительная каретка выполнена в виде столика для градуируемой шкалы, установленного (Л на закрепленных на станине направлякщих и кинематически связанного с шаговым электродвигателем, соединенным с выходом блока управления автооператором, входы которого соединены с фотоприемником и датчиком положения, причем граверный узел закреплен на основной горизонтальной каретке, а подвижна я платформа сх установлена на станине с воз.можностьй перемещения параллельно перемещению основной гокизонтальной каретки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Соловьев М.Т | |||
| Автоматизированная система градуировки шкал (АСГШ Л Межотраслевой реферативный сборник Передовой производственнотехнический опыт | |||
| Изделия радиоэлектронной промышленности, конструирование и технология, № 2, сер | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
